

AGV惯导应用之无人牵引车惯性测量单元IMU
电子说
描述
随着技术的发展,惯性导航技术的应用已经越来越深入民用领域,特别是在不断升级无人化水平的现代智能仓储物流系统,其室外牵引AGV已经与惯性测量单元紧密结合。
室外牵引AGV 顾名思义就是在室外工作的牵引AGV小车,通过牵引AGV小车车头和车箱之间是用工具牵引的一般的货车或半挂车。
目前而言,室外AGV牵引车的主要场景用于车间内外或车间之间大批货物的运输,如汽车制造业仓库向装配线的运输。随着汽配行业规模和质量要求的不断提高,企业在注重生产物流自动化的同时,对于生产智能化的要求也在逐步提升。全天候全场景无人牵引车搬运解决方案,实现“室内至室外、产线至仓库”全场景覆盖,与其他的机械运载装置进行连接和组合,满足大吨位货物牵引搬运需求。
AGV所使用的智能无人驾驶系统通常以高精度组合导航系统和三维激光雷达环境感知系统作为自主导航的核心模块,运动决策层采用从层决策机制,运动控制层利用经典控制理论和现代控制算法相结合的综合控制算法,整体系统以高复杂性和算法领先性实现牵引车的优异性能表现。
其中的组合导航系统大多数以惯性导航系统为主,其原因主要是由于惯性导航能够提供比较多的导航参数,还能够提供全姿态信息参数,这是其他导航系统所不能比拟的。此外,它不受外界干扰,隐蔽性好,这也是其独特的优点。
由于AGV通常体积不大,所以内置其中的惯导IMU也在往小型化、模块化、集成化的方向发展。惯导IMU即惯性测量单元,它通常由三个单轴的加速度计和三个单轴的陀螺仪组成。加速度计用于检测物体在载体坐标系统中独立三轴的加速度信号,而陀螺仪则检测载体相对于导航坐标系的角速度信号。通过对这些信号进行处理,可以解算出物体的姿态。这种高度集成的模块与室外牵引AGV的工作非常适配,尤其是IVS508IMU惯性测量单元。
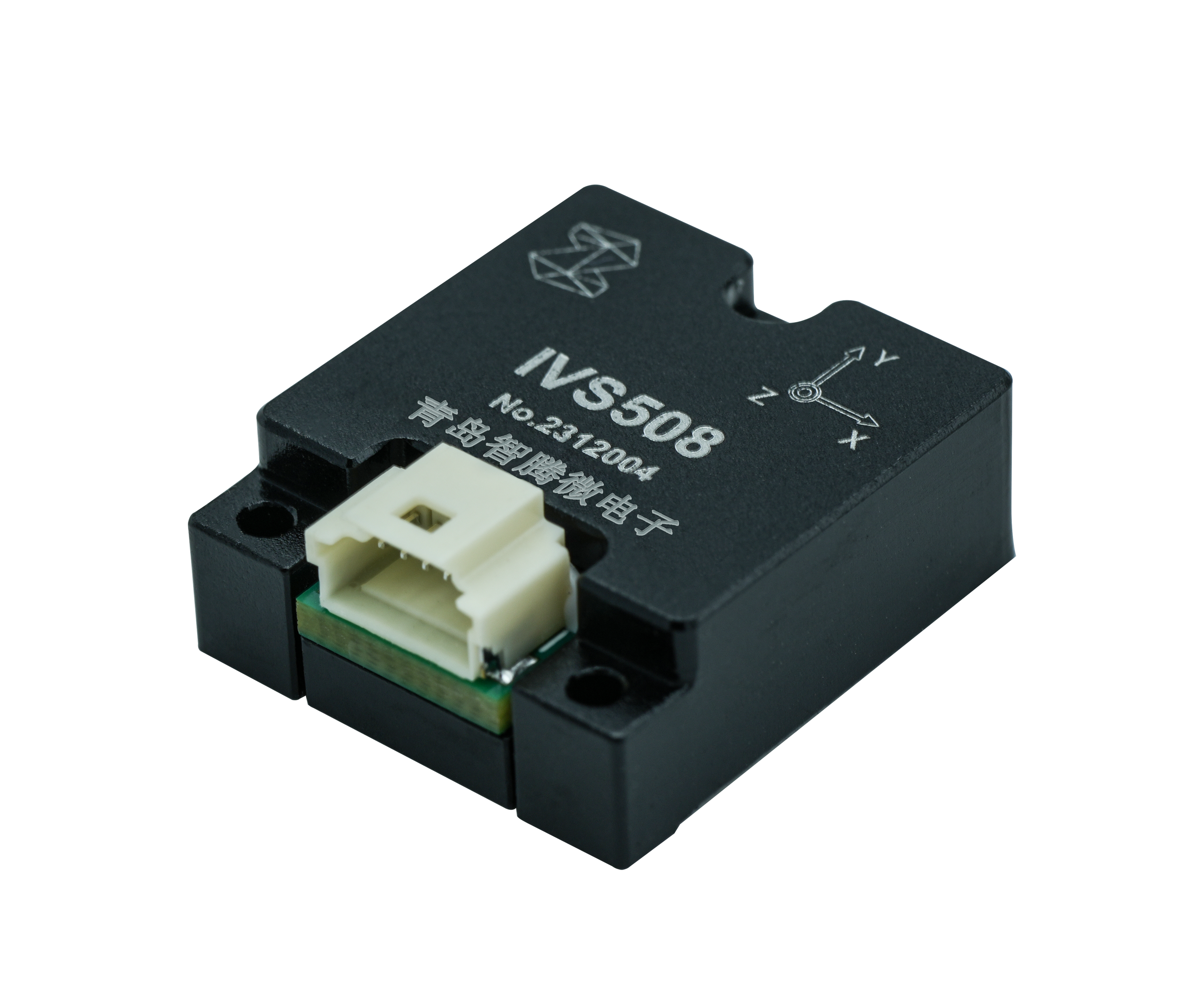
IVS508 是一款紧凑型高性能 6 轴惯性测量单元,其具备实时输出三个运动方向角速度和加速度测量能力。其经过全温范围标定以满足用户在不同条件下使用的性能需求。产品采用不锈钢外壳,为苛刻的应用场景提供可靠的惯性测量性能。具有超小体积、环境适应性强、低功耗、精准时间同步等特点。
IVS508非常适用于无人驾驶飞机、智慧农业、机械控制等动态控制系统和姿态系统,以及AGV、机器人等领域。
-
M-G366PDG IMU模组高精度惯性测量单元抗振性能优异2026-03-06 1396
-
MEMS惯性测量单元(IMU)SCHA634产品分析2023-11-27 3755
-
直接使用惯性测量单元 (IMU)2022-12-28 2147
-
使用arduino/genuino 101的板载惯性测量单元(IMU)教程2022-12-19 1466
-
无人车传感器 IMU与GPS数据融合进行定位机制 精选资料推荐2021-08-18 2495
-
iSensor MEMS惯性测量单元(IMU)手册2021-05-24 1277
-
IMU 3DM-GX5-252020-12-16 888
-
3DM-GX5-15 惯性测试单元IMU2020-12-07 853
-
IMU惯性测量单元的介绍及工作原理2020-06-08 6378
-
关于IMU惯性测量单元的工作原理详解2020-06-01 11004
-
IMU和INS的区别-惯导专题2020-05-18 6447
-
惯性测量单元的应用-惯导专题2020-04-26 1574
-
IMU惯性测量单元是什么?2020-04-20 8130
全部0条评论

快来发表一下你的评论吧 !
