

Renesas永磁同步电机无位置传感器算法介绍
描述
无位置传感器算法在现代电机控制领域扮演着至关重要的角色。这类算法能够在不依赖传统物理位置传感器(如霍尔传感器或编码器)的情况下,精确地控制电机的转子位置和速度。这种技术的应用范围广泛,从家用电器到工业驱动,再到电动汽车,其重要性不言而喻。
无位置传感器算法的核心在于通过分析电机内部的电气信号来间接推断转子的位置和速度。这些算法通常利用电机的电压、电流反馈以及内置的数学模型来计算转子的状态。最常见的无位置传感器算法包括基于反电动势(Back Electromotive Force, BEMF)的方法、观测器方法和高频注入法等,每种算法都有不同的优缺点,本文主要介绍比较常见的BEMF的方法,也是相对比较成熟也易于实现的一种算法。
基本原理
当电机旋转时,定子绕组会产生与转速成正比的反电动势。通过监测这个反电动势的大小和相位,可以推断出转子的位置。
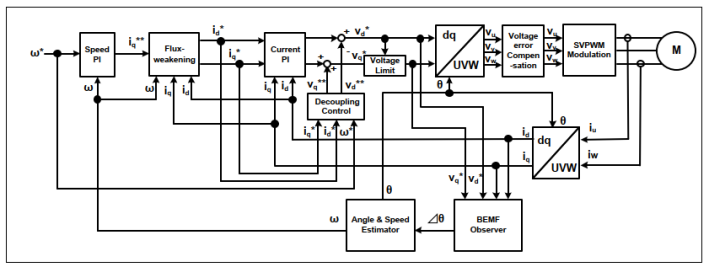
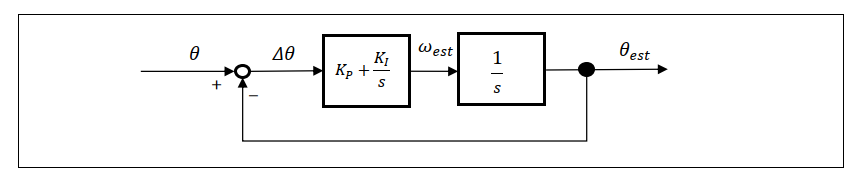
使用BEMF观测器的无传感器矢量控制的框图
基于DQ轴的电机电压方程如下:

将 和
和 作为电压扰动,它们分别写成
作为电压扰动,它们分别写成 则上式可写为:
则上式可写为:

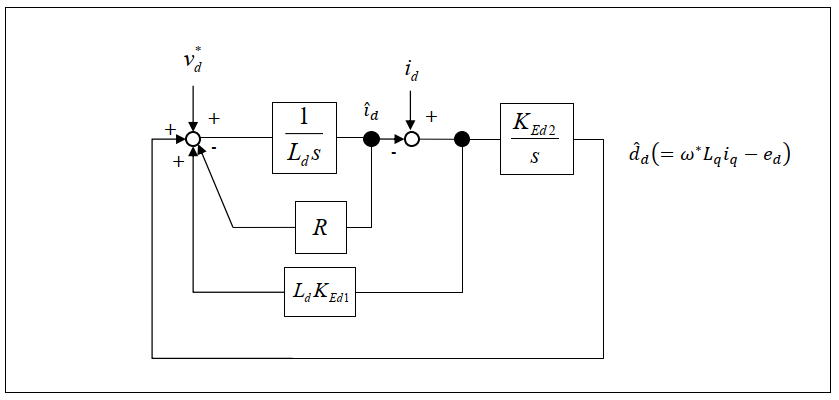
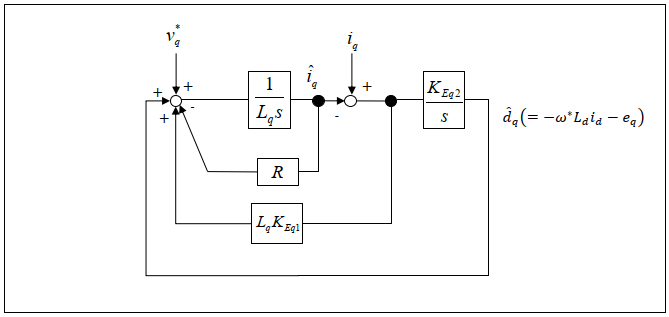
则DQ轴的观测器框图分别如下:
接下来,根据估计的电压扰动 计算BEMF,如下所示:
计算BEMF,如下所示:
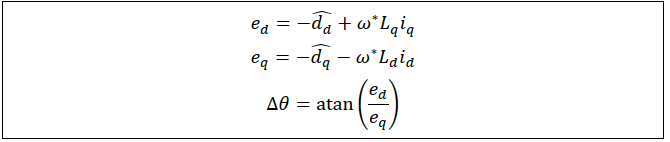
为了提高系统的鲁棒性,可以加入如下PLL:
仿真模型和仿真结果
dq轴的估计方程重写如下:


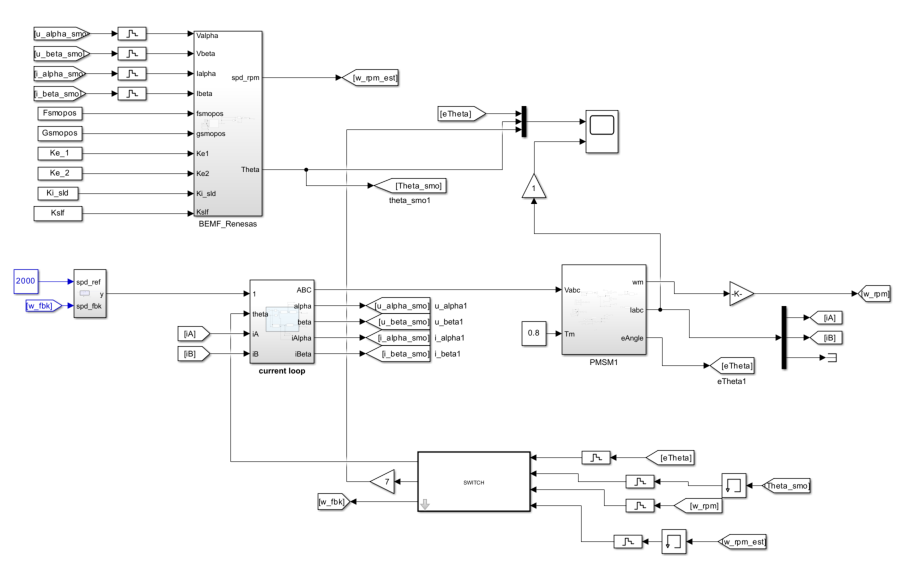
根据上式搭建仿真模型如下:
电机正常启动后切换到无位置传感器控制方式,切换前后角度的变化和电流变化如下图:
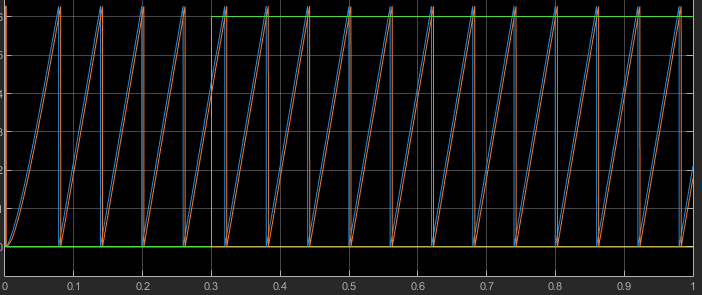
电角度波形
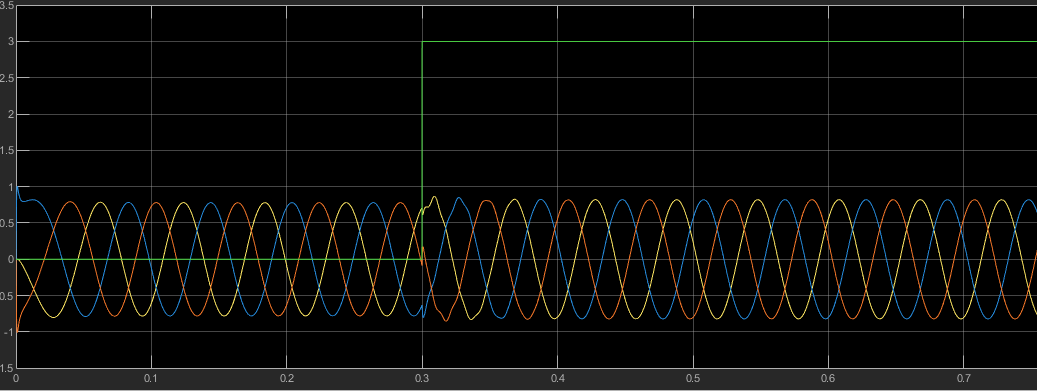
三相电流波形
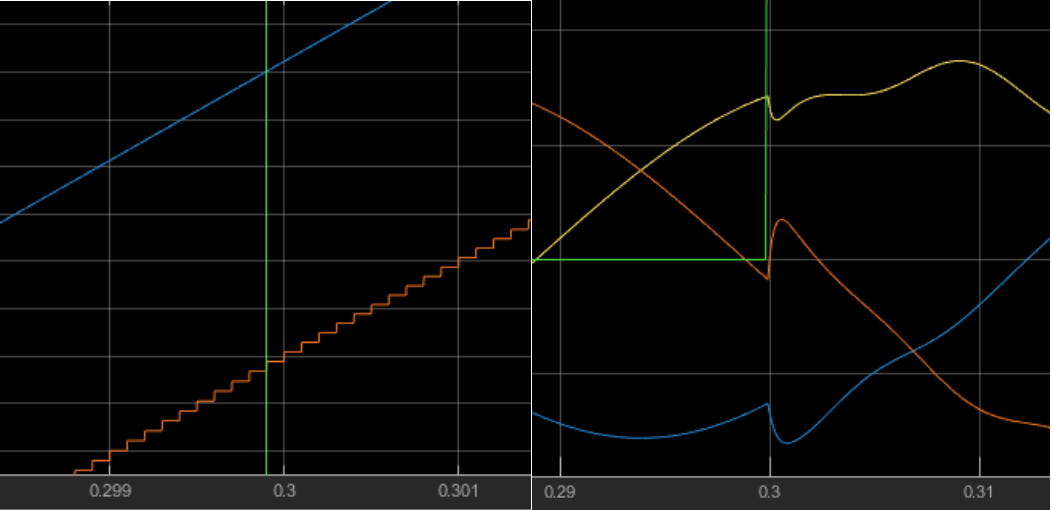
算法切换时刻角度和电流变化
从仿真看在从有位置传感器切换到无位置传感器方案后,观测角度几乎没有波动,电流有轻微的波动后,很快就稳定。仿真结果验证了该算法的有效性。
-
工程硕士论文——基于FOC的永磁同步电机全速域无位置传感器控制策略2025-03-06 499
-
FOC 算法实现永磁同步电机调整指南2025-03-03 996
-
BLDC永磁同步电机无传感器该如何去启动呢2021-09-18 3136
-
MATLAB仿真永磁同步电机无位置传感器控制系统的研究与设计2021-08-30 1934
-
浅析基于滑模观测器的永磁同步电机SPMSM无位置传感器仿真2021-08-27 1762
-
有偿求 基于滑膜观测器的永磁同步电机无位置传感器研究的例程2019-06-12 2218
-
永磁同步电机无速度传感器控制系统的详细中文资料免费下载2018-08-09 1635
-
如何使用微芯片DSPIC DSC系列实现永磁同步电机的无传感器聚焦算法2018-06-01 1561
-
面装式永磁同步电机驱动系统无位置传感器控制2018-03-14 1144
-
无位置传感器的永磁同步电机硬件仿真2018-03-09 1773
-
一种变增益宽速度范围的永磁同步电机无位置传感器控制_张磊2017-01-08 884
-
基于自适应滑模观测器的永磁同步电机无位置传感器控制2017-01-05 1206
-
永磁直线同步电机驱动系统速度和位置无传感器检测新方法2016-05-05 961
全部0条评论

快来发表一下你的评论吧 !
