

基于DSP的无线传感器网络定位设计
MEMS/传感技术
描述
为了实现无线传感器网络节点内部、节点与节点之间的有效通信,在采用Atmel公司的ATZB-900-B0在无线通信硬件模块和IEEE 802.15.4 MAC协议栈的基础上,根据定位网络的应用需求以及数据命令的用途,制定节点消息格式、消息类型和消息内容,明确消息的具体走向,确定节点的应用层框架结构。通过超声波相关的测距定位算法来对网络节点的测距性能和定位系统性能进行实验分析。定位实验结果表明,节点的平均定位误差为0.27m,最大定位误差为0.76m。
引言
无线传感器网络(Wireless Sensor Network, WSN)具有信息采集、传输、处理的功能和动态的拓扑结构。微小型传感器节点具有计算能力、通信能力,将其部署在监控区域内,构成可以自主完成自组织特定任务的WSN智能网络信息系统,无线传感器节点在监控区域内实现自定位。无线传感器节点不仅要能够实现自身定位,还要能够在监控区域内出现入侵者时,有效地安排适当的节点来消灭入侵者,起到自主防御的作用。
当前,国内外的高校、科研机构以及其他组织已经开发出很多成熟的WSN定位系统。如Active Badge、Active Bat系统、AHLos系统、SpiderBat系统等。其中,国内关于定位方法和技术的研究比较多,国外的研究开展的比较早,很多定位系统已经走出实验室,投入商业化应用。但仍存在节点测距范围有限、定位精度不高等关键技术问题。目前,常用的定位技术主要是基于红外测距、RSSI检测、声波以及超声波测距的定位技术,主要是室内环境中应用。红外信号的穿透性差,容易受到环境因素的影响,传输距离短,需要大量的传感器节点,定位系统的成本较高。因此,在完成测距定位的同时,开发一个简单实用、操作便捷的定位监控系统也非常重要。
针对上述问题,本文以节点高精度系统定位为目标,研究基于DSP的相关定位技术,设计并实现了基于超声波相关检测定位系统,系统界面友好,可以为WSN提供更好的节点自身定位服务支持。
一.定位系统结构
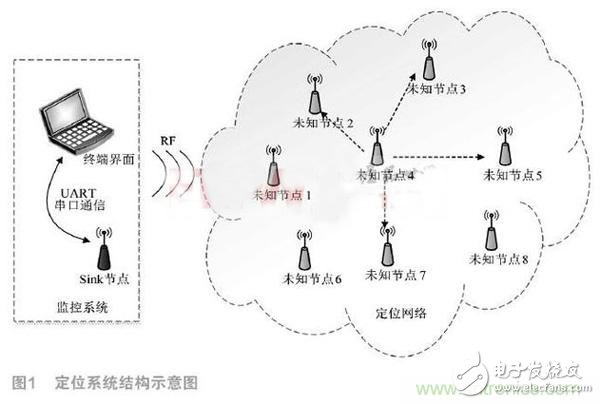
根据定位系统的实际要求,设计了WSN定位系统,系统的基本结构如图1所示。该系统主要由两部分组成:定位网络和监控系统。定位网络中节点的位置随机进行部署,其位置不确定,节点通过超声波相关测距技术,使用相关检测算法计算节点之间的距离,通过无线方式将距离信息转发传递至Sink节点。上位机监控系统部分又分为Sink节点信息处理和终端界面显示两个子部分,Sink节点根据收集到的节点距离信息来计算节点的坐标位置,终端界面显示网络拓扑结构及节点坐标。
1.传感器节点架构
根据具体应用场景的不同,节点的总体框架主要由DSP、RAM、ATZB-900-B0无线传输模块、射频收发天线、温度测量模块、A/D采样模块、超声波收发电路以及电源模块组成。本设计中无线数据通信模块选用Atmel公司的ATZB-900-B0模块,它是一个灵敏度高、功耗低、超紧凑型的IEEE 802.15.4/ZigBee模块。定位系统的网络组建以及节点间的消息传输都是通过ZigBee技术来实现的。
2.节点传感器模块
超声波测距传感器是一种以超声波为载体的微小型测距雷达,其具有结构简单、体积小、能耗低、信息处理简单可靠、价格低廉的特点,不受光照、电磁、粉尘以及烟雾等因素的干扰。为了解决单一超声波传感器方向指向性唯一的问题,本文采用六元阵列的方法,将六组超声波收发探头均匀分布在正六边形的边上,如图2所示,保证超声信号的二维平面全向收发。
3.节点处理器模块
由于节点要在野外环境中,无法进行电源的供给,节点需要保持尽可能长时间的工作状态或者处于待机状态,这也就要求处理器的能量消耗要尽可能小,延长节点的寿命。所以选取高性能、低功耗的控制器在节点设计中至关重要。TMS320C6748TM DSP是TI公司生产的一款新型低功耗浮点型DSP处理器,属于C6000系列,采用了超长指令字(Very Long Instruction Word, VLIW)结构,为DSP的高效运行提供了保障。它融合了TMS320C67xTM DSP 和TMS320C64xTM DSP 的指令集架构,支持DSP的高数字信号处理性能和精简指令计算机(Reduced Instruction Set Computer, RISC)技术,满足当前的应用场景需求。除高速处理能力、极低的功耗以及丰富的外设接口外,还具有音频、视频等多媒体能力以及高速STAT硬盘和SD接口的外部存储器接口等,由于这些不是本论文关注的焦点,在此不赘述。
二.节点通信消息设计
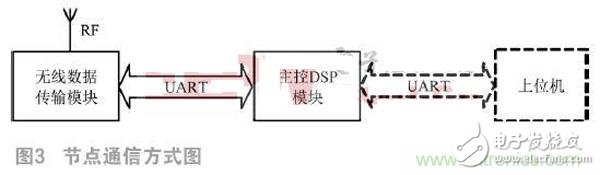
在传感器网络中,采用ZigBee通信协议时,节点被分为Coordinator、Router以及End Device三种。Coordinator负责系统的初始化工作,选择网络的信道等参数建立网络,供其他节点加入;Router负责节点之间命令消息的路由转发实现;End Device负责任务是消息的发送和接收,只能和父节点进行数据通信,不具有路由转发的功能。在本系统中,Sink节点主要负责监控网络的建立、上位机命令的分析处理和操作、数据的收集等任务,是整个网络的数据存储和处理中心,在上位机和监控网络之间起到桥梁的作用,是系统应用中的Coordinator。监控网络区域内的待定位节点要具备消息转发与路由其他节点的能力,需要可以给所有节点发送消息,也可以接收到所有节点的消息,是系统应用中的Router。每个节点由无线数据传输模块和主控DSP模块组成,同一节点的两个模块之间通过UART总线进行通信。节点之间通过无线RF射频方式进行通信。Sink节点与上位机使用UART总线进行通信,未知节点的通信方式中并不包含该通信方式。节点的通信方式如图3所示。
1.Sink节点任务设计
Sink节点(Coordinator)的任务主要包括节点的初始化、建立网络以及应用层任务命令。这里将Sink节点的无线模块和DSP模块看作一个整体,Sink节点程序流程图如图4所示。应用层任务命令包括检测和分析上位机下发的命令以及根据上位机命令做出相应的处理操作。应用层命令主要是Sink节点分别和上位机、定位网络之间的交互。
三.定位系统实验及结果分析
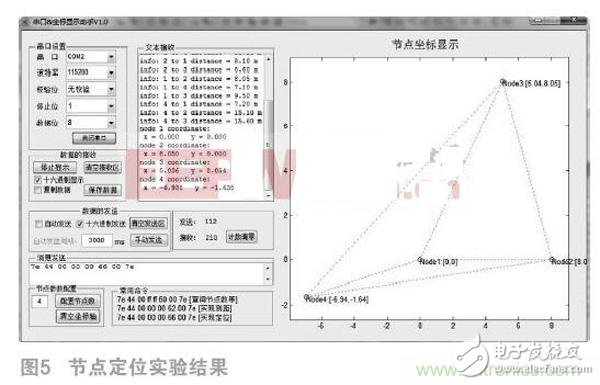
节点的测距性能主要通过节点的测距精度直观反映,而节点的测距性能又直接影响系统的定位性能。本文对已经研究设计的定位节点进行一系列的测距定位实验。首先进行节点的测距性能实验,然后进行节点的定位性能实验。本实验的实测环境是实验室外走廊,实验场景如图5所示,实验环境温度为14~18℃,使用一个Sink节点和两个未知节点进行实验。通过多次测量,取测量结果的平均值作为最终结果的方式来减小测距误差。实验过程中,Sink节点可以自由移动,以无线方式控制两个未知节点进行测距。Sink节点通过串口线与PC端连接,使用上位机软件进行命令的发送和距离测量数据的收集显示。将一个未知节点设置为超声信号接收节点,放置在一个固定的位置;另一个设置为超声信号源节点,等间距移动测量。超声信号源节点从距离接收节点1m处开始测量,每隔1m进行一组测量,每个测量点测50次,取这50次测距结果的平均值作为该测量点的测距结果。
四.结束语
本文设计了节点的通信方式及消息,在统一的消息格式内,根据所要执行的任务的不同,具体设计各种应用消息;其次,根据系统需求和节点类型的不同,设计并说明了不同节点的程序流程;同时设计了良好的人机交互定位界面;最后,对网络节点的测距性能和定位性能进行实验分析,验证了系统基本满足对测距范围和测距精度要求和节点定位的技术要求。
-
无线传感器网络定位技术综述2018-11-05 4599
-
无线传感器网络的节点定位怎么解决?2019-08-30 3517
-
无线传感器网络定位系统有什么优点?2019-10-30 3121
-
基于UWB的无线传感器网络定位技术有何作用?2021-06-07 1771
-
无线传感器网络的目标定位问题研究2009-05-23 417
-
无线传感器网络中的定位技术研究2009-08-29 615
-
基于信号强度的矿井无线传感器网络定位的实现2009-10-06 480
-
无线传感器网络的节点自定位技术2009-11-14 703
-
无线传感器网络定位技术研究2010-05-28 727
-
无线传感器网络(WSN)定位系统设计2011-01-25 4337
-
无线传感器网络定位算法分析2011-05-25 1433
-
基于无线传感器网络的定位系统设计2011-11-03 3222
-
基于无线传感器网络的车载节点定位2012-11-01 6214
-
无线传感器网络节点定位是什么2019-10-16 7916
-
基于ZigBee的无线传感器网络定位技术综述2021-06-11 928
全部0条评论

快来发表一下你的评论吧 !
