

汽车自动驾驶系统层级定义详解
汽车电子
描述
CES2017正在美国拉斯维加斯举行,自动驾驶技术无疑成为了各大汽车和科技巨头争先抢夺的焦点。关于自动驾驶你了解多少?本文将详解不同分级自动驾驶技术的意义。
自动驾驶系统需要进行分级,从细节上去考虑,目前美国已形成了统一,以SAE International关于自动化层级的定义为准,如下:
L0 :驾驶员完全掌控车辆;
L1 :自动系统有时能够辅助驾驶员完成某些驾驶任务;
L2 :自动系统能够完成某些驾驶任务,但驾驶员需要监控驾驶环境,完成剩余部分,同时保证出现问题,随时进行接管。在这个层级,自动系统的错误感知和判断有驾驶员随时纠正,大多数车企都能提供这个系统。L2可以通过速度和环境分割成不同的使用场景,如环路低速堵车、高速路上的快速行车和驾驶员在车内的自动泊车;
L3 :自动系统既能完成某些驾驶任务,也能在某些情况下监控驾驶环境,但驾驶员必须准备好重新取得驾驶控制权(自动系统发出请求时)。所以在该层级下,驾驶者仍无法进行睡觉或者深度的休息。在L2完成以后,车企的研究领域是从这里延伸的。由于L3的特殊性,目前看到比较有意义的部署是在高速L2上面做升级;
L4 :自动系统在某些环境和特定条件下,能够完成驾驶任务并监控驾驶环境;L4的部署,目前来看多数是基于城市的使用,可以是全自动的代客泊车,也可以是直接结合打车服务来做。这个阶段下,在自动驾驶可以运行的范围内,驾驶相关的所有任务和驾乘人已经没关系了,感知外界责任全在自动驾驶系统,这里就存在着不同的设计和部署思路了;
L5 :自动系统在所有条件下都能完成的所有驾驶任务。
我们所说的自动驾驶系统,通常是在3~5层级,随着层级的提高,对系统的要求也随之提高。由于目前自动驾驶的分级,特别是L3和L4处在还没有大规模应用在实际生活之中,我们对待这个需求就存在着一些认知上的争议。
分类方法:以DDT、DDT的任务支援和设计运行范围来区分;
动态驾驶任务(DDT):是指在道路上驾驶车辆需要做的操作和决策类的行为;
车辆执行:包括通过方向盘来对车辆进行横向运动操作 、通过加速和减速来控制车辆;
感知和判断(OEDR):对车辆纵向运动方向操作、通过对物体和事件检测、认知归类和后续响应,达到对车辆周围环境的监测和执行对应操作、车辆运动的计划还有对外信息的传递。
动态驾驶任务支援(DDT Fallback):自动驾驶在设计时候,需要考虑系统性的失效(导致系统不工作的故障)发生或者出现超过系统原有的运行设计范围之外的情况,当这两者发生的时候,需给出最小化风险的解决路径。
设计运行范围(ODD)就是一组参数,把我们知道的天气环境、道路情况(直路、弯路的半径)、车速、车流量等信息作出测定,以确保系统的能力在安全的环境之内。
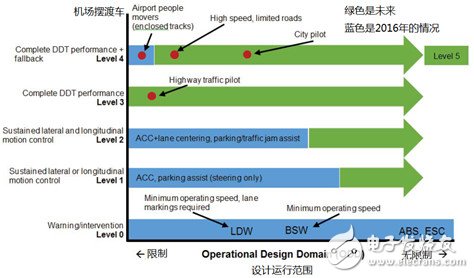
图1 设计适用范围的对比
L2 组合驾驶
驾驶员和汽车来分享控制权,系统同时具有纵向和侧向的自动控制,且具备两项以上。在整个开启的过程中,驾驶员可以不操作方向盘、油门和刹车(放弃主要控制权),但需要观察周围情况,并提供安全操 作 。
驾驶员必须随时待命,在系统退出和系统出错的情况下随时接上。
自动驾驶系统:我们从控制和感知进行分解
对执行器的要求可以看出来,是需要对纵向的动力总成和刹车系统,横向的转向系统进行融合控制。
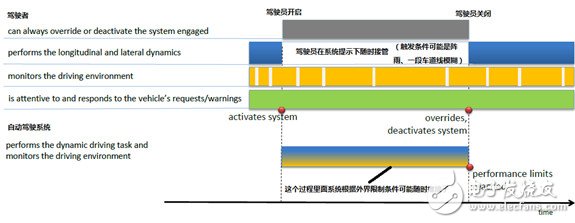
图2 L2的工作方式
解析L2的感知需求,是需要把整个场景考虑清楚
低速自动泊车场景:感知车位、行人、车辆
低速环路堵车辅助场景:识别车辆、摩托车、车道线
高速封闭道路场景:识别车辆、车道线
我们在现实中看到的L2系统,既有单个摄像头实现的TJA,也有很多差异化设计。这里由于有着驾驶员随时监控环境这条要求区分,车企可以选择做得少也可以选择做的多一些,因为不管是感知还是驾驶决策,完全依照车企对L2自动驾驶的需求不同来调整。
既有拿一个LRR、5个SRR、2个Camera来做的,也有拿单摄像头来进行处理的低成本方案。
既可以仅靠车道识别来进行车辆居中保持,也可以依靠高精度定位和高速道路地图来实现车道的匹配和居中,提高横向控制特性。
这里的核心区别,就是对以下的内容进行限制:
对不同的道路、基础设施的可容忍性
车速的运行范围
对感知错误(误识别率)的容忍性
对自动驾驶系统在不同流量环境下的改进可行性,往L3进化可能性
对车主的使用的判研以评估综合风险性
我们在把这些拿出来讨论的时候,其实是可以考虑做一份工程的规范,然后根据各个车企的配置情况来进行测试和对标的。所以总的来说,这个L2是所有车企在积累和提高特性的必争之地。
L3 有限度的自动驾驶
在某些环境允许的条件下,驾驶员可以完全放弃操控,交给自动化系统进行操控。如果系统出现问题,是不能完全自主进入安全状态的,需要驾驶人员来接管,但这个时间一般较短。虽然这个看上去不大实用,但是确实是德国三家豪车企业目前在自身系统演进过程中比较看重的点。这些发表的研究性的配置,都是基于L2的演进来考虑的。
没了驾驶员的确认,整个感知的要求高了很多:
准确度要求高了,不能出错,这里一定有融合对比;
感知范围距离要求高了,需要给自动驾驶决策时间;
对环境耐受性要求高,突然下冰雹和暴雨也需要时间来切换;
即使系统发生错误的时候,整个转换的退出还需要时间;
感知系统要有冗余性要求,既有融合情况,也有单个感知单元失效诊断之后fail-operational的要求,也要独立能运行。
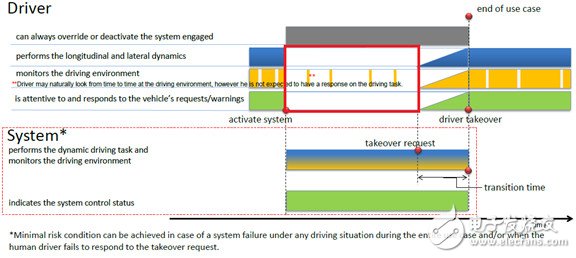
图3 L3的系统情况
因为L3没有进入产品化,所以这些研究阶段的配置可能会进一步进行调整,可以看出,L3阶段是之前L2顶级配置性能上面再进行演化。由于在运行中失去了驾驶员的监控,任何运行中的感知错误都是不能接受的(没看到车就会产生错误决策,就会出现问题)。
L4 全自动驾驶
在福特明确提出要做L4的自动驾驶和自动驾驶服务之前,没有哪个车企这么敢来做,因为这里一旦启动,已经对驾驶者没有要求。在之前看到的更多的,还是基于机场小型低速摆渡车、市区低速巴士之类的有限制的运行。
系统100%负责感知的准确性
系统100%要在设定的范围内完成所有驾驶员要做的事情,没有后备
系统在自身出问题和外界环境变化的时候,要考虑冗余的策略,保证车内和车外安全
自身感知、处理和执行段的所有故障诊断
自身感知、处理和执行段的Fail-Operational
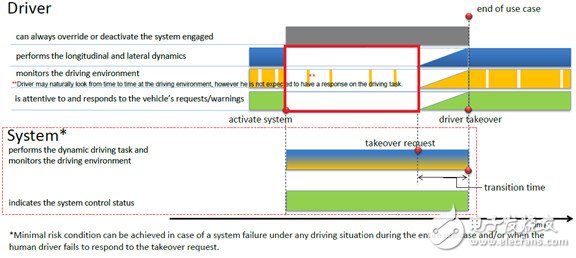
图4 L4的运行情况
现阶段,L4的设计考虑还配置个安全驾驶员,这里的情况比较微妙,先做性能,再做冗余,下个阶段就完全考虑实现L4,到了这里就不打折扣了。
本文摘自汽车工程师朱玉龙文章
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8161
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4659
-
汽车自动驾驶技术2016-04-14 5433
-
[科普] 谷歌自动驾驶汽车发展简史,都来了解下吧!2016-10-25 4140
-
自动驾驶的到来2017-06-08 7296
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7338
-
【威雅利 汽车】苹果最新专利曝光,要把VR和AR带进自动驾驶汽车2018-04-24 3419
-
高级安全驾驶员辅助系统助力自动驾驶2018-09-14 3316
-
如何让自动驾驶更加安全?2019-05-13 3608
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2759
-
联网安全接受度成自动驾驶的关键2020-08-26 3053
-
如何保证自动驾驶的安全?2020-10-22 2066
-
边缘计算在自动驾驶汽车的应用2021-07-12 1574
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2286
-
自动驾驶技术的实现2021-09-03 3062
全部0条评论

快来发表一下你的评论吧 !
