

一文概叙自制舵机云台
描述
本文主要涉及选择合适的舵机、设计云台结构、编写控制代码以及组装调试等步骤。以下是一个详细的制作流程:
一、材料准备
1、舵机:
通常需要至少两个舵机,一个用于控制云台的左右旋转,另一个用于控制云台的上下倾斜。先以简单的PWM舵机为例:DS-S006M九克铜齿舵机(有条件的也可以上总线舵机,配合高精度磁编码传感器,可以做闭环控制,角度微调,精准度也更高)。
 DS-S006M九克铜齿舵机
DS-S006M九克铜齿舵机注意舵机的扭矩和速度,以确保能够满足云台的运动需求。
舵机选择:
①扭矩:确保所选舵机的扭矩足够大,以支持云台及其负载(如摄像头)的重量。
②速度:虽然速度不是决定性因素,但较快的响应速度可以提供更流畅的控制体验。
③精度:如果可能,选择带有高精度磁编码器的舵机,以提高角度控制的准确性。
2、控制板:
可以使用Arduino、ESP32等微控制器作为控制板,它们具有丰富的外设接口和强大的控制能力。还需要安装相应的开发环境和库文件,以便编写和上传控制代码。
3、电源:
根据舵机和控制板的功率需求选择合适的电源。对于DS-S006M九克铜齿舵机等小型舵机,通常可以使用5V或6V的直流电源。使用稳压电源,确保电压稳定,避免波动影响舵机和控制板的性能。
4、其他材料:
支架和连接件:用于固定舵机和构建云台结构。
螺丝和螺母:用于固定各个部件。
导线:用于连接舵机和控制板。
二、云台结构设计
1、确定云台尺寸和形状:
根据实际需求设计云台的尺寸和形状,确保能够稳定地支撑摄像头或其他负载。设计时确保云台的重心位于旋转轴的中心附近,以减少振动和不稳定性。必要情况下可以考虑添加配重块来调整重心位置。
2、设计旋转机构:
利用舵机的输出轴和齿轮系统构建旋转机构,实现云台的左右旋转和上下倾斜。
注意设计合理的传动比和齿轮间隙,以确保运动的平稳性和精度。建议使用齿轮、轴承或滑轨等机械元件来优化传动效率和减少摩擦。设计时考虑传动比的调整,以便在速度和扭矩之间找到最佳平衡点。
3、固定支架:
设计并制作固定支架,将舵机固定在云台上,并确保各个部件之间的连接牢固可靠。
材料选择上,使用轻质但坚固的材料,如铝合金或碳纤维,以减轻重量并增强稳定性。
可以使用3D打印部件来快速原型制作和测试不同的设计。
三、编写控制代码
1、初始化舵机:
在代码中初始化舵机,设置其控制引脚和初始角度。
2、编写控制逻辑:
根据实际需求编写控制逻辑,实现云台的左右旋转和上下倾斜功能。
可以使用循环语句和延时函数控制舵机的运动速度和范围。
①库文件:
利用现有的舵机控制库(如Arduino的Servo库)可以大大简化代码编写过程。
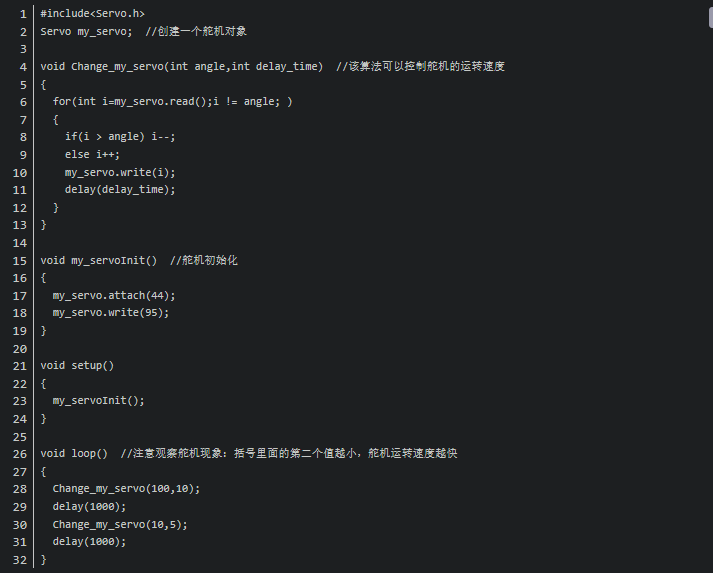 代码示例
代码示例如果使用自定义或特殊类型的舵机,可能需要编写或修改库文件以适应其通信协议和控制方式。
②控制算法:
考虑实现PID(比例-积分-微分)控制算法来优化舵机的位置控制和响应速度。
使用传感器(如陀螺仪或加速度计)来实现更高级的稳定性和防抖功能
3、调试和优化:
在实际测试中不断调试和优化控制代码,以确保云台的稳定性和可靠性。
四、组装调试
1、组装云台:
按照设计好的结构将各个部件组装在一起,确保所有连接都牢固可靠。
连接电源和控制板:
将电源连接到控制板和舵机,确保电路连接正确无误。
2、上传控制代码:
将编写好的控制代码上传到控制板中,并检查是否能够正常运行。
3、测试云台功能:
①在进行实际测试之前,先进行软件模拟或静态测试以验证控制代码的正确性。
②通过控制板或遥控器测试云台的功能,包括左右旋转和上下倾斜等动作。
③观察云台的运动是否平稳、精确,并根据需要进行调整和优化。观察并记录云台在运动过程中的任何异常行为(如振动、卡顿或漂移),并进行相应的调整和优化。
通过以上步骤,你就可以使用舵机制作出一个简单的云台了。当然,根据实际需求的不同,你还可以对云台进行进一步的改进和扩展,优化算法和执行逻辑;还有增加功能:比如增加防抖功能、增加更多的舵机以实现更复杂的运动等。祝贺大家都可以制作出一个稳定、可靠且功能丰富的云台系统。了解更多舵机应用知识,关注“德晟舵机”。
-
如何使用两个舵机为ESP32-CAM创建云台控制2022-06-09 18368
-
【盈鹏飞EVB-T335开发板试用体验】NO.3 舵机云台3D打印2017-10-02 5045
-
自制舵机控制系统的一点感想2021-06-28 1616
-
一文看透什么是舵机?舵机的工作原理是什么?2021-06-30 10547
-
一文读懂什么是舵机2021-08-19 5054
-
Arduino平台---带舵机云台超声波避障实验资料下载2018-02-27 1586
-
dfrobot云台舵机支架套件简介2019-12-10 2173
-
stm32 mpu6050 舵机云台支架跟随2021-12-06 961
-
舵机云台的制作分享2022-12-21 2740
全部0条评论

快来发表一下你的评论吧 !
