

开源六轴协作机器人myCobot 320结合人脸表情识别情绪!
电子说
描述
在大家的印象中,机械臂通常被应用在工业领域,执行一些重复性工作,以帮助和替代人类。然而,机械臂不仅限于此,它们也可以成为陪伴型机器人,为我们提供更多样化的互动体验。
今天,我想探索机械臂的一些与众不同的功能。通过结合人脸表情识别技术,我们可以让机械臂感知到我们的情绪变化。当我们开心时,机械臂可以跟着一起开心地舞动;当我们伤心难过时,它可以过来安慰我们,给予温暖的抚摸。这种基于表情反馈的互动能让机械臂更好地陪伴我们。
在接下来的部分中,我们将详细介绍这种系统的工作原理、技术实现和应用场景,展示机械臂。
文章会分为机械臂介绍,技术点介绍,项目的实现三部分,首先我将介绍我使用到的机械臂。
Robotic Arm
myCobot 320 M5
Mycobot 320,一款具备六自由度的协作型机械臂,凭借其独特的设计和高精度伺服电机成为了领域内的亮点。这款机械臂拥有最大350mm的工作半径和最大1000g的末端负载能力,使其适用于广泛的应用场景。Mycobot 320不仅支持灵活的视觉开发应用,还提供了深入的机械运动原理解析,为用户带来了12个标准的24V工业IO接口,满足不同的开发需求。

它的开放性极高,兼容大多数主流操作系统和编程语言,包括Python和ROS等,为开发者提供了极大的灵活性和自由度。无论是在教育、研发还是工业应用中,Mycobot 320都能提供强大支持,使创新和应用开发更加便捷高效。
摄像头模组
适配于myCobot 320M5的摄像头模组可以安装在机械臂末端。通过摄像头用USB数据线进行通信,实时获取到机械臂末端的一个画面,就能够识别人脸的表情处于怎样的一个状态。

技术概览
pymycobot
pymycobot 是一个用于与 mycobot 机械臂进行串行通信和控制的 Python API。这个库是为了方便开发者使用 Python 语言控制 mycobot 机械臂而设计的。它提供了一系列的函数和命令,让用户可以通过编程方式控制机械臂的动作和行为。例如,用户可以使用该库获取机械臂的角度、发送角度指令来控制机械臂的移动,或者获取和发送机械臂的坐标信息。
使用这个库唯一的标准是,得使用mycobot 系列的机械臂,这是专门为mycobot进行适配的一款机械臂。
pymycobot · PyPI
deepface
DeepFace 是一个强大的 Python 库,用于面部识别和面部属性分析。它基于多种深度学习模型,如 VGG-Face、Google FaceNet、OpenFace、Facebook DeepFace、DeepID 和 Dlib 等,提供了面部验证、面部检测、面部属性分析(如性别、年龄、种族和情绪)等功能。DeepFace 通过简单的接口使得复杂的面部识别和分析任务变得更加容易,广泛应用于安全系统、用户身份验证和智能交互等领域。
GitHub - serengil/deepface: A Lightweight Face Recognition and Facial Attribute Analysis (Age, Gender, Emotion and Race) Library for Python
开发过程
项目架构
我将该项目主要分为两个功能:
Emotion detection Recognition: 主要用来处理人脸面部的情绪识别,能够返回信息当前人脸的情绪主要是什么,平常,开心,还是伤心等表情
Robotic Arm Control:主要功能用于设置机械臂的运动控制,例如坐标控制,角度控制等等。
情绪识别功能实现
现在的人脸情绪识别已经很多厉害的人提供了各种识别的方法在github上了,但如果想自己做一个识别人脸情绪的功能的话还是分为4 个步骤:
1. 数据收集和预处理
2. 模型选择和训练
3. 模型优化和测试
4. 部署和应用
从0开始的话,需要做蛮多步骤的,如果我们只是单纯的使用,没有刻意需要用在某些应用场景当中,我们可以选择一款别人已经训练好的检测模型,我们直接使用就好了!现在目前有OpenCV,FER(Facial Expression Recognition),DeepFace,Microsoft Azure Face API等等。
这次我们用deepface进行emotion识别的使用。
环境搭建
首先当然是安装使用环境啦,opencv的版本不要使用较低的版本会影响使用。
pip install deepface pip install opencv-python
它有很多功能有年龄的检测,性别的检测,情绪的检测等等多种模型,本次我们主要是用到的是情绪的检测,要用到“facial_expression_model_weights.h5”这个模型,再使用的过程会自动帮忙下载这个模型来使用。
简单介绍一下使用的功能。
import os
import cv2
from deepface import DeepFace
# 读取图像
image = cv2.imread(image_path)
# 分析图像中的面部表情
results = DeepFace.analyze(image, actions=['emotion'], enforce_detection=False)
print(result)
[{'emotion': {'angry': 81.24255537986755, 'disgust': 16.530486941337585, 'fear': 1.6193315386772156, 'happy': 6.932554015293135e-05, 'sad': 0.4116043448448181, 'surprise': 0.1861470052972436, 'neutral': 0.009808379400055856}, 'dominant_emotion': 'angry', 'region': {'x': 136, 'y': 65, 'w': 124, 'h': 124, 'left_eye': None, 'right_eye': None}, 'face_confidence': 0.9}]
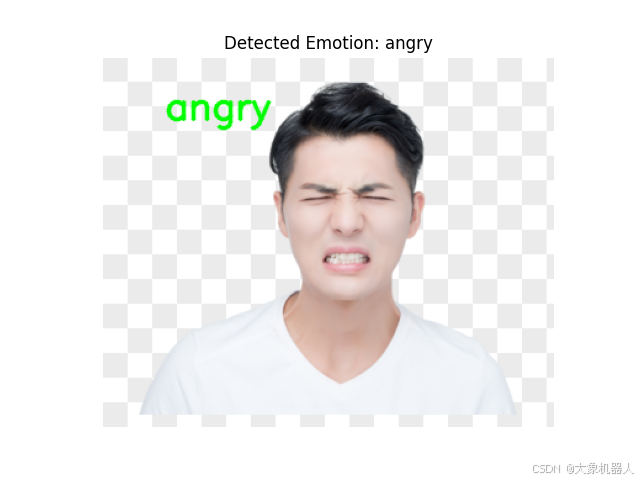
我们可以看到返回的数据angry 占81就说明此时的表情是生气的。
这只是一张图片的检测,我们多看看几张图片检测他的准确率如何。
这是图片的检测,我们需要用到一个持续的,所以就会要启动摄像头一直的对画面进行分析,所以将一张张照片拼接在一起就是一个视频了。
以下是对视频的代码处理。
import cv2
from deepface import DeepFace
# 打开摄像头
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open webcam.")
exit()
while True:
# 读取视频帧
ret, frame = cap.read()
if not ret:
break
# 分析视频帧中的面部表情
try:
result = DeepFace.analyze(frame, actions=['emotion'], enforce_detection=False)
emotion_info = result[0]['emotion'] # 获取情绪信息
dominant_emotion = result[0]['dominant_emotion'] # 获取主要表情
emotion_probability = emotion_info[dominant_emotion] # 获取主要表情的概率
# 在视频帧上显示主要表情及其概率
text = f'{dominant_emotion}: {emotion_probability:.2f}%'
cv2.putText(frame, text, (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
# 显示视频帧
cv2.imshow('Emotion Detection', frame)
except Exception as e:
print(f"Error analyzing frame: {e}")
# 按 'q' 键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()
就能够得到下面的效果了。我们可以根据主要的表情来返回数值。
有时候确实会出现一些不够准确的情况,但是我们可以人为的进行判断,一个表情长时间出现的时候才触发机械臂的运动。
机械臂运动控制
在这一部分我来介绍如何对mycobot 320进行机械臂的控制,主要用到的是pymcyobot库。
首先还是安装环境
pip install pymycobot
以下是几种常用mycobot机械臂的控制方法,
from pymycobot.mycobot import MyCobot
send_angles(degrees, speed)
功能: 发送所有角度给机械臂所有关节
参数:
degrees: (List[float])包含所有关节的角度 ,六轴机器人有六个关节所以长度为 6,四轴长度为 4,表示方法为:[20,20,20,20,20,20]
speed: 表示机械臂运动的速度,取值范围是 0-100
ex:
mc = MyCobot("com10",115200)
mc.send_angles([0,0,0,0,0,0],100)
角度控制是对每个关节的角度进行调整,用于一些固定点位的控制比较合适,使用的范围比较局限,接下来还有另一种控制方法,坐标控制。
坐标控制指的是精准控制机械臂末端执行器的位置和姿态,使其在特定的坐标系中完成各种操作任务,是比较常用的一种控制方式。
from pymycobot.mycobot import MyCobot
send_coords(coords, speed, mode)
功能: 发送整体坐标和姿态,让机械臂头部从原来点移动到您指定点
参数:
coords:
六轴:[x,y,z,rx,ry,rz]的坐标值,长度为 6
四轴:[x,y,z,rx]的坐标值,长度为 4
speed: (int) 表示机械臂运动的速度,范围是 0-100
mode: (int): 取值限定 0 和 1
0 表示机械臂头部移动的路径为非线性,即随机规划路线,只要机械臂头部以保持规定的姿态移动到指定点即可。
1 表示机械臂头部移动的路径为线性的,即智能规划路线让机械臂头部以直线的方式移动到指定点.
ex
mc = MyCobot("com10",115200)
mc.send_coords([100,20,30,-50,60,-100],100,1)
为了让整体代码看起来可读性高,可修改性高,创建机械臂类方便进行调用和修改,将对应的动作给提前写入进去。
class RobotArmController:
def __init__(self,port):
#初始化链接
self.mc = MyCobot(port, 115200)
self.init_pose = [0.96, 86.22, -98.26, 10.54, 86.92, -2.37]
self.coords = [-40, -92.5, 392.7, -92.19, -1.91, -94.14]
self.speed = 60
self.mode = 0
def SadAction(self):
...
def HappyAction(self):
...
当我生气的时候在我面前打招呼
当我开心的时候它和我一起开心的跳起舞来了
总结
科技发展的越来的越快,在未来应该也会有智能的人形机器人,搭配ChatGPT等一些人工智能的模型,说不定在某一天能够帮助人们排忧解难,甚至可以成为心理医生来治疗一些有心理疾病的人,真期待未来科技的发展。
审核编辑 黄宇
-
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品2025-04-25 7435
-
大象机器人myCobot 320六轴协作机械臂用户开箱!2024-03-21 808
-
大象机器人六轴协作机械臂myCobot 320 进行手势识别!2024-01-31 2335
-
基于Matlab的开源六自由度协作机器人实验平台2021-09-07 1602
-
【技术杂谈】用AI读懂人心?情感科学专家:靠表情识别情绪不靠谱2019-07-30 2459
-
六轴机器人如何选购?2019-03-25 1338
-
六轴机器人如何选购?六轴机器人的选购技巧2019-03-21 1561
-
协作机器人伺服和传感器核心器件揭秘2018-10-12 3905
-
SEER模拟情绪表达机器人:可同步追踪人脸表情,甚至眼神接触2018-08-31 3242
-
六轴工业机器人的主要特点2017-08-08 6693
-
大族机器人-六轴机器人2016-12-25 1727
-
stm32红外六足机器人2014-03-27 10626
-
表情机器人网络大赛2012-09-11 5555
全部0条评论

快来发表一下你的评论吧 !
