

基于Dragonboard 410c的kinect应用系列之三——获取深度图实例介绍
处理器/DSP
描述
上篇文章我们介绍了SimpleOpenNI开发平台搭建,今天小编继续为大家讲解用kinect绘制深度图与绘制人体躯干实例具体操作过程!
一 、用kinect绘制深度图
Kinect+OpenNI允许用户获得深度图像,一个红外发射头负责发射红外,另一个负责接受,这样的话我们就获得了背影射物体离摄像头有多少个像素点,也就是有多远。
在processing里面每一个工程被称为sketch而不是一般软件的Project因为Processing的程序运行起来更像是画家在纸上画的草图,素描风明显。
为了让深度图在电脑上显示出来,获得用户想要的数据,我们就必须导入OpenNI,目的是导入打包好OpenNI数据,所以首先导入数据包(库的思想)。
--------------------------------------------------------
import SimpleOpenNI.*;
---------------------------------------------------------
接下来我们声明一个全局对象,context来和Kinect来取得数据联系
--------------------------------------------------------
SimpleOpenNI context;
---------------------------------------------------------
接下来我们来看看setup()函数,要知道一个事情,就是setup()函数里面所有的内容只执行一遍,而且只是程序一开始的阶段才被执行。
--------------------------------------------------------
void setup()
{
// 建立新的对象
context = new SimpleOpenNI(this);
// 使能深度影响
context.enableDepth();
// 创建一个这样的尺寸,它可以保证装下深度的一切信息
size(context.depthWidth(), context.depthHeight());
}
---------------------------------------------------------
接下来我们来看一下Draw()里面的 函数,有关于draw()函数,它是无限循环运行的,频率是每秒60次。
-------------------------------------------------------
void draw()
{
//不断更新来自Kinect Camera的数据
context.update();
// 绘制深度图
image(context.depthImage(),0,0);
}
---------------------------------------------------------
Context.update()函数对每一帧的数据都有更新动作
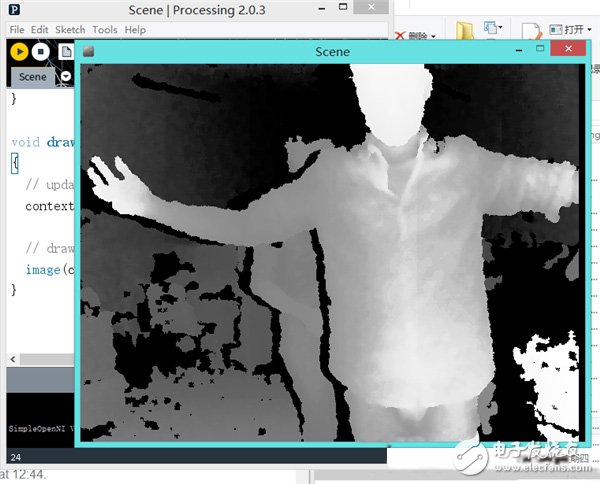
运行sketch 的结果如图所示:
代码解析如下:
import SimpleOpenNI.*;
SimpleOpenNI context;
void setup()
{
// instantiate a new context
context = new SimpleOpenNI(this);
// enable depth image generation
context.enableDepth();
// create a window the size of the depth information
size(context.depthWidth(), context.depthHeight());
}
void draw()
{
// update the camera
context.update();
// draw depth image
image(context.depthImage(),0,0);
}
---------------------------------------------------------------------
如果知道了深度信息,你有什么想法?
这个问题很值得在这里,仔细的思考一下,你打算做点什么?
或者是现在你没有太多想法,但是接下来的案例中我要求你必须有自己的想法,就算不会码代码。
二、 绘制人体躯干
首先呢,先要普及一下知识,有关于3D空间距离计算的知识,
在三D空间里,距离的计算,和我们在高中学得向量计算是一个道理的,下面从2D空间说起:

X1=2 X2=9 
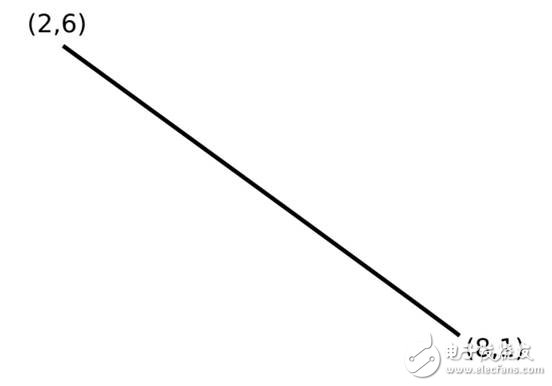
直线由两个点构成,坐标如上图已给出。


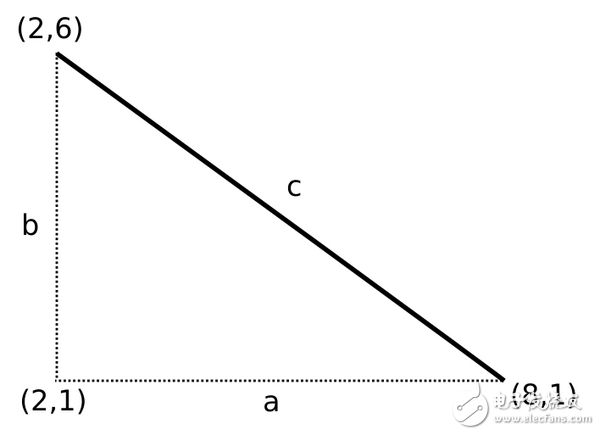
 ----------------------------------(直角三角形关系)
----------------------------------(直角三角形关系)
 --------------------------------(a的坐标距离表示)
--------------------------------(a的坐标距离表示)
 ---------------------------------(b的坐标距离表示)
---------------------------------(b的坐标距离表示)
 --(同样符合三角形边的关系)
--(同样符合三角形边的关系)
 --------(过渡到2D空间距离)
--------(过渡到2D空间距离)
关键就是3D空间距离,多加了一个Z坐标

上面那个公式就是3D空间里点之间里的公式。
那么怎么在代码里实现计算3D空间两点间距离。
首先,定义一个新的函数
distances3D( )
void distance3D(PVector point1, PVector point2)
{
}
在函数里面首先我们要添加一些变量来储存x,y 和 z 的值,我们还需要一个变量来储存最终的结果也就是返回值
float diff_x, diff_y, diff_z; // 储存x,y,z的值
float distance; // 来储存最后的返回值(结果也就是距离)
接下来计算两个点之间的x,y,z的差值
diff_x = point1.x - point2.x;
diff_y = point1.y - point2.y;
diff_z = point1.z - point2.z;
之后就是简单的计算
return distance; // return the distance as a float
整理之后的代码就是:
float distance3D(PVector point1, PVector point2
){
float diff_x, diff_y, diff_z;
float distance;
diff_x = point1.x - point2.x;
diff_y = point1.y - point2.y;
diff_z = point1.z - point2.z;
distance = sqrt(pow(diff_x,2)+pow(diff_y,2)+pow(diff_z,2));
return distance;
}
写好程序之后,运行结果就是这个深度图与人体躯干的形态,其中黑色是后加工的,人体颜色也是加工过的。
三、望有所思
看完这个例子千万别无动于衷,这回你一定要有好的想法,比如你想获得键盘映射、操控键盘、获得鼠标映射、控制鼠标、或者是直接获得图形映射和控制图形变化,或许你能写出个好玩的游戏。
这个话题先放一放,贪吃蛇的平台移植会很简单,所以以后我们一定要试一试,最终的结果就是:用手势控制蛇的运动方向从而控制蛇去吃更多的食物。
基础教程这里做一个完结,基础教程完毕。请期待下几期的更新!
- 相关推荐
- 热点推荐
- Kinect
- DragonBoard 410c
-
PC机如何利用total control控制DragonBoard 410c2018-09-28 3692
-
基于DragonBoard 410c android系统实现红外遥控功能2018-09-25 2048
-
如何为DragonBoard 410c定制Android系统2017-02-22 2111
-
基于Dragonboard 410c的kinect应用系列之四——获取人体骨骼图2017-02-21 3457
-
基于Dragonboard 410c的kinect应用系列之五——脸部识别实现代码2017-02-20 1314
-
【DragonBoard 410c试用体验】 DragonBoard 410c 基于VPN的高安全性基础物联网2016-09-01 4531
-
【DragonBoard 410c试用体验】DragonBoard 410c官方全套文档2016-08-27 27129
-
【DragonBoard 410c试用体验】开箱与硬件解析2016-08-08 9415
-
Dragonboard 410c 电源系统架构介绍2016-06-30 570
全部0条评论

快来发表一下你的评论吧 !
