

【GD32 MCU 入门教程】GD32 MCU 常见外设介绍 (5) TIMER 模块介绍
描述
5.1.TIMER 基础知识
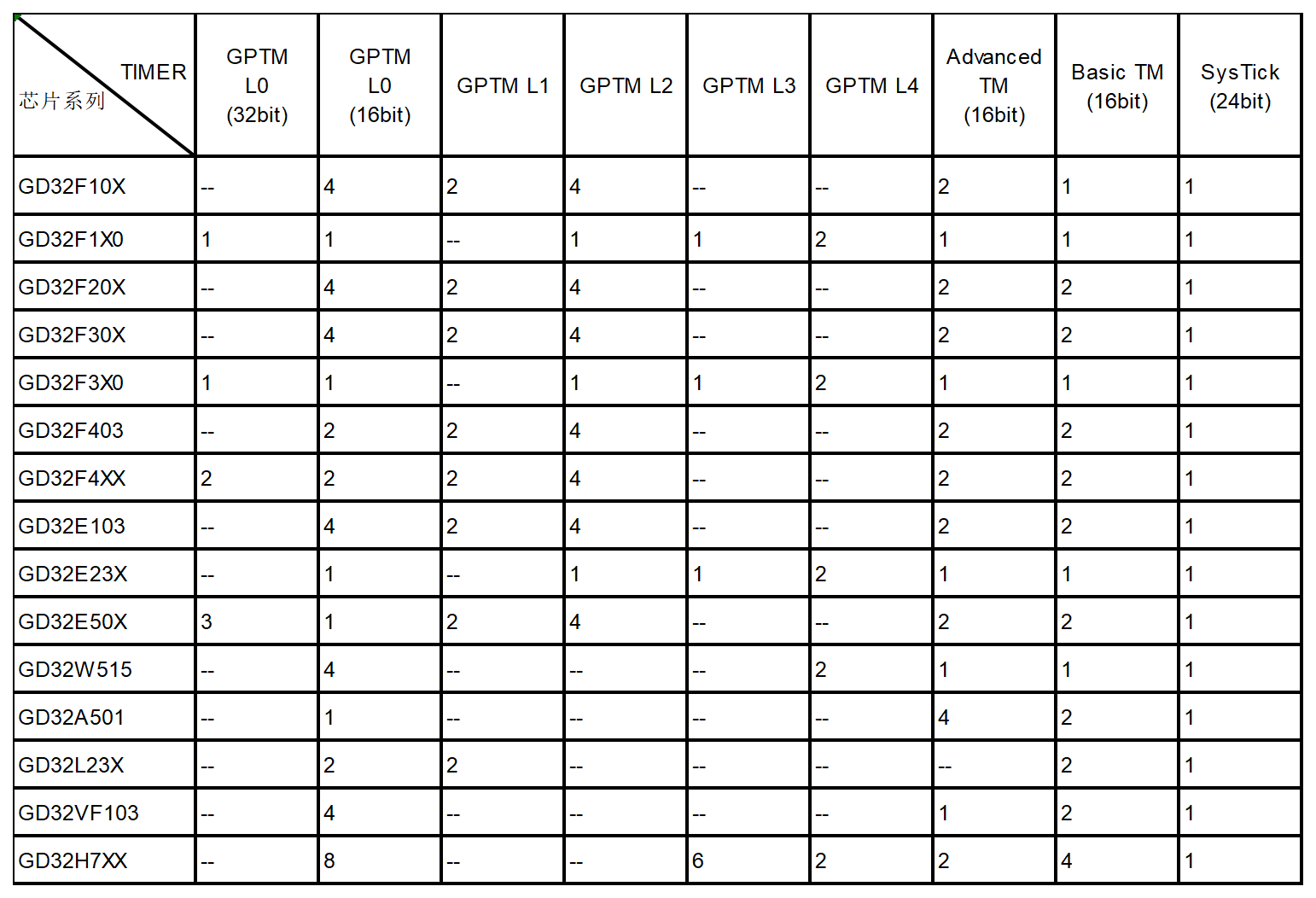
TIMER分高级定时器,通用定时器L0,L1,L2和基本定时器。
5.2.硬件连接说明
TIMER 属于片内外设,对于外部硬件设计,只需要单独IO口外接信号线即可。
5.3.GD32 TIMER 外设原理简介(以 GD32F30X 的高级定时器为例)
GD32 TIMER 主要特性
◼ 总通道数: 4;
◼ 计数器宽度: 16位;
◼ 定时器时钟源可选:内部时钟,内部触发,外部输入,外部触发;
◼ 多种计数模式:向上计数,向下计数和中央计数;
◼ 正交编码器接口:用来追踪运动和分辨旋转方向和位置;
◼ 霍尔传感器接口:用来做三相电机控制;
◼ 可编程的预分频器: 16位。运行时可以被改变;
◼ 每个通道可配置:输入捕获模式,输出比较模式,可编程的PWM模式,单脉冲模式;
◼ 可编程的死区时间;
◼ 自动重装载功能;
◼ 可编程的计数器重复功能;
◼ 中止输入功能;
◼ 中断输出和DMA请求:更新事件,触发事件,比较/捕获事件和中止事件;
◼ 多个定时器的菊链使得一个定时器可以同时启动多个定时器;
◼ 定时器的同步允许被选择的定时器在同一个时钟周期开始计数;
◼ 定时器主/从模式控制器。
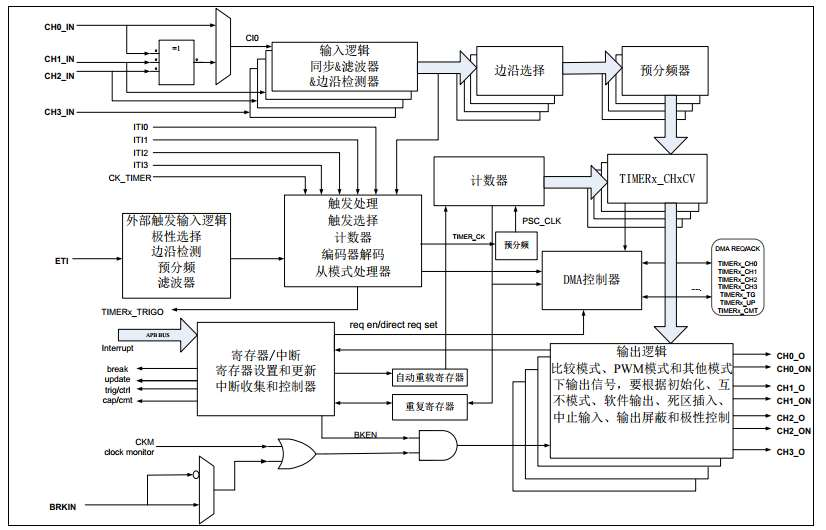
TIMER 结构框图介绍
5.4.软件配置说明
定时中断 TIMER4
通用定时器L0(TIMER1/2/3/4) 是4通道定时器,支持输入捕获,输出比较,产生PWM信号控制电机和电源管理。通用定时器L0计数器是16位无符号计数器。通用定时器L0是可编程的,可以被用来计数,其外部事件可以驱动其他定时器。
这一章,将使用定时器产生中断,然后在中断服务函数里面翻转 LED上的电平,来指示定时器中断的产生。接下来我们以通用定时器 TIMER4 为实例,来说明要经过哪些步骤,才能达到这个要 求,并产生中断。定时器配置步骤如下:
1)TIMER4 时钟使能
rcu_periph_clock_enable(RCU_TIMER4);
2) 初始化定时器参数,设置自动重装值,分频系数,计数方式等
在库函数中,定时器的初始化参数是通过初始化函数timer_parameter_struct 实现的:
void timer_init(uint32_t timer_periph, timer_parameter_struct* initpara);
第一个参数是确定是哪个定时器,这个比较容易理解。第二个参数是定时器初始化参数结构体指针,结构体类型为timer_parameter_struct ,下面我们看看这个结构体的定义:
/* TIMER init parameter struct definitions */ typedef struct { uint16_t prescaler; /*!
针对 TIMR4 初始化范例代码格式
timer_initpara.prescaler = 5999; //30M/6000 =500Hz timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 4000-1; //800ms timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_init(TIMER4, &timer_initpara);
对于定时器定时周期的计算,设 TIMER4 的经过总线分频后得到的时钟为 30MHz,通过预分频 5999,得到 TIMER4 每个计 数的时钟为 1/(30MHz / (5999+1)) =0.2ms,4000 得到的周期为 0.2ms *4000 =800ms
3)设置 TIMER 允许更新中断
因为我们要使用 TIMER4 的更新中断,寄存器的相应位便可使能更新中断。在库函数里面定时器中断使能是通过timer_interrupt_enable函数来实现的:
void timer_interrupt_enable(uint32_t timer_periph, uint32_t interrupt);
第一个参数是选择定时器号,这个容易理解。
第二个参数非常关键,是用来指明我们使能的定时器中断的类型。
4) TIMER4 中断优先级设置
在定时器中断使能之后,因为要产生中断,必不可少的要设置 NVIC 相关寄存器,设置中断优先级。通过nvic_irq_enable 函数实现中断优先级的设置。
针对 TIMR4 初始化范例代码格式
nvic_irq_enable(TIMER4_IRQn, 1, 1);
5)允许 TIMER工作,也就是使能 TIMER
光配置好定时器还不行,没有开启定时器,照样不能用。我们在配置完后要开启定时器,在固件库里面使能定时器的函数是通过timer_enable函数来实现的
void timer_enable(uint32_t timer_periph)
这个函数非常简单,比如我们要使能TIMER4,方法为:
timer_enable(TIMER4);
6)编写中断服务函数
在最后,还是要编写定时器中断服务函数,通过该函数来处理定时器产生的相关中断。中断产生后,通过状态寄存器的值来判断此次产生的中断属于什么类型。然后执行相关的操作,我们这里使用的是更新(溢出)中断,在处理完中断之后应来清除该中断标志。
在固件库函数里面,用来读取中断状态寄存器的值判断中断类型的函数是:
FlagStatus timer_interrupt_flag_get(uint32_t timer_periph, uint32_t interrupt)
该函数的作用是,判断定时器 TIMER 的中断类型,并判断是否发生中断。
针对 TIMR4 中断服务函数范例代码:
void TIMER4_IRQHandler(void) { if(SET == timer_interrupt_flag_get(TIMER4, TIMER_INT_UP)){ /* clear channel 0 interrupt bit */ timer_interrupt_flag_clear(TIMER4, TIMER_INT_UP); gd_eval_led_toggle(LED2); } }
PWM 输出 TIMER0
高级定时器(TIMER0和TIMER7)是四通道定时器,支持输入捕获和输出比较。可以产生PWM信号控制电机和电源管理。高级定时器含有一个16位无符号计数器。高级定时器是可编程的,可以用来计数,其外部事件可以驱动其他定时器。高级定时器包含了一个死区时间插入模块,非常适合电机控制。
本章,我们使用的是 TIMER0的通道0 输出 PWM(脉冲宽度调制)。
下面我们介绍通过库函数来配置该功能的步骤:
(1)开启 TIMER0 和 GPIO 时钟,配置 PA8复用功能输出。
rcu_periph_clock_enable(RCU_TIMER0); rcu_periph_clock_enable(RCU_GPIOA); gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);
这里还需要说明一下, 对于定时器通道的引脚关系,引脚的IO口

这里补充说明下关于TIMER的相关GPIO口的命名
TIMERx_CHx : 定时器通道x
TIMERx_CHx_ON :定时器反向通道
TIMERx_BRKIN :刹车引脚
TIMERx_ETI:外部时钟输入
(2)初始化 TIMER0 ,设置 TIMER0 的预分频和周期等参数, ,在上一节定时器中断章节我们已经有讲解,这里就不详细讲解,调用的格式为
timer_initpara.prescaler = 5999; timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 4000; timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_initpara.repetitioncounter = 0; timer_init(TIMER0, &timer_initpara);
3)设置 TIMER0_CH0 的 PWM 模式, 使能 TIMER0 的 CH0 输出。 在库函数中, PWM 通道设置是通过函数timer_channel_output_config来设置的
void timer_channel_output_config(uint32_t timer_periph, uint16_t channel, timer_oc_parameter_struct* ocpara)
我们直接来看看结构体timer_oc_parameter_struct的定义:
typedef struct { uint16_t outputstate; /*!< channel output state */ uint16_t outputnstate; /*!< channel complementary output state */ uint16_t ocpolarity; /*!< channel output polarity */ uint16_t ocnpolarity; /*!< channel complementary output polarity */ uint16_t ocidlestate; /*!< idle state of channel output */ uint16_t ocnidlestate; /*!< idle state of channel complementary output */ }timer_oc_parameter_struct;
针对 TIMR0 CH0 初始化范例代码格式
/* CH0, CH1 and CH2 configuration in PWM mode */ timer_ocinitpara.outputstate = TIMER_CCX_ENABLE; timer_ocinitpara.outputnstate = TIMER_CCXN_DISABLE; timer_ocinitpara.ocpolarity = TIMER_OC_POLARITY_HIGH; timer_ocinitpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH; timer_ocinitpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW; timer_ocinitpara.ocnidlestate = TIMER_OCN_IDLE_STATE_LOW; timer_channel_output_config(TIMER0, TIMER_CH_0, &timer_ocinitpara);
4)设置PWM输出以及脉冲宽度占空比
timer_channel_output_pulse_value_config(TIMER0, TIMER_CH_0, 2000); timer_channel_output_mode_config(TIMER0, TIMER_CH_0, TIMER_OC_MODE_PWM0); timer_channel_output_shadow_config(TIMER0, TIMER_CH_0, TIMER_OC_SHADOW_DISABLE); timer_primary_output_config(TIMER0,ENABLE);
5)使能 TIMER0
在完成以上设置了之后,我们需要使能 TIMER0。使能 TIMER0 的方法前面已经讲解过:
timer_enable(TIMER0);
通过以上 5 个步骤,我们就可以控制 TIMER0的 CH0 输出 PWM 波了。这里特别提醒一下大家,高级定时器虽然和通用定时器类似,但是高级定时器要想输出 PWM,必须多额外加一条函数
void timer_primary_output_config(uint32_t timer_periph, ControlStatus newvalue);
输入捕获 TIMER2
通用定时器L0(TIMER1/2/3/4) 是4通道定时器,支持输入捕获,输出比较,产生PWM信号控制电机和电源管理。通用定时器L0计数器是16位无符号计数器。通用定时器L0是可编程的,可以被用来计数,其外部事件可以驱动其他定时器。
本章要实现通过输入捕获,来获取TIMER2_CH0(PA6)上面的下降沿,下面我们介绍库函数配置上述功能输入捕获的步骤:
1)开启 TIMER2 时钟,配置 PA6为复用功能,并开启上拉电阻。
rcu_periph_clock_enable(RCU_TIMER2); rcu_periph_clock_enable(RCU_GPIOA); gpio_init(GPIOA, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ, GPIO_PIN_6); //INCUPTURE -TIMER2
跟上一讲 PWM 输出类似,这里我们使用的是定时器2的通道 0,所以我们从对应的数据手册可以查看到对应的 IO 口为 PA6:

2) 初始化定时器参数,设置自动重装值, 分频系数,计数方式等
/* TIMER2 configuration */ timer_initpara.prescaler = 5999; timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 4000; timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_init(TIMER2, &timer_initpara);
3)设置 TIMER2 的输入捕获参数,开启输入捕获
库函数是通过 timer_input_capture_config 函数来初始化输入比较参数的: timer_input_capture_config(TIMER2,TIMER_CH_0,&timer_icinitpara);
同样,我们来看看参数设置结构体 TIM_ICInitTypeDef 的定义:
typedef struct { uint16_t icpolarity; /*!< channel input polarity */ uint16_t icselection; /*!< channel input mode selection */ uint16_t icprescaler; /*!< channel input capture prescaler */ uint16_t icfilter; /*!< channel input capture filter control */ }timer_ic_parameter_struct;
我们的配置代码是:
/* initialize TIMER channel input parameter struct */ timer_channel_input_struct_para_init(&timer_icinitpara); /* TIMER2 CH0 input capture configuration */ timer_icinitpara.icpolarity = TIMER_IC_POLARITY_RISING; timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI; timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1; timer_icinitpara.icfilter = 0x0; timer_input_capture_config(TIMER2,TIMER_CH_0,&timer_icinitpara);
4) 使能捕获中断和NVIC
timer_interrupt_enable(TIMER2,TIMER_INT_CH0); nvic_irq_enable(TIMER2_IRQn, 1, 1);
5) 编写中断服务函数
void TIMER2_IRQHandler(void){……}
6) 使能定时器
timer_enable(TIMER2);
通过以上 6 步设置,定时器 2 的通道 0 就可以开始输入捕获了
外部时钟输入 TIMER1
通用定时器L0(TIMER1/2/3/4) 是4通道定时器,支持输入捕获,输出比较,产生PWM信号控制电机和电源管理。通用定时器L0计数器是16位无符号计数器。通用定时器L0是可编程的,可以被用来计数,其外部事件可以驱动其他定时器。
本章要实现使用TIMER1 PA0 作为时钟输入引脚,配置流程:
(1)使能GPIO,TIMER 时钟和GPIO口复用配置
rcu_periph_clock_enable(RCU_GPIOA); rcu_periph_clock_enable(RCU_AF); rcu_periph_clock_enable(RCU_TIMER1); gpio_init(GPIOA,GPIO_MODE_IN_FLOATING,GPIO_OSPEED_50MHZ,GPIO_PIN_0);

(2)通过查看数据手册,可以看到TIMER1_CH0_ETI,根据前面所讲,是可以支持外部时钟输入的。
TIMER的结构体,初始化定时器参数,设置自动重装值, 分频系数,计数方式等
//ETI timer_initpara.prescaler = 1; // 2 分频 timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 65535; timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_initpara.repetitioncounter = 0; timer_init(TIMER1,&timer_initpara); timer_enable(TIMER1);
(3)配置TIMER的时钟来源和时钟源处理的配置
timer_input_trigger_source_select(TIMER1,TIMER_SMCFG_TRGSEL_ETIFP); timer_external_clock_mode1_config(TIMER1, TIMER_EXT_TRI_PSC_OFF, TIMER_ETP_RISING, 0);
(4)使能TIMER
timer_enable(TIMER1);
5.5.TIMER 使用注意事项
TIMER 高级定时器 做定时用的时候(使用到UPDAT中断),在产生中断之后,高级定时器的其他所有的状态标志位会被置位,但是不会置位中断标志位.
本教程由GD32 MCU方案商聚沃科技原创发布,了解更多GD32 MCU教程,关注聚沃科技官网
-
【GD32 MCU入门教程】GD32 MCU GPIO 结构与使用注意事项2024-09-07 4781
-
【GD32 MCU 入门教程】GD32 MCU FPU 使用方法2024-08-25 2808
-
【GD32 MCU 入门教程】GD32 MCU 常见外设介绍(14)RTC 模块介绍2024-08-23 2986
-
GD32 MCU 入门教程】GD32 MCU 常见外设介绍(12)FMC 模块介绍2024-08-21 4137
-
【GD32 MCU 入门教程】一、GD32 MCU 开发环境搭建(1)使用Keil开发GD322024-08-08 5553
-
不同型号的GD32 MCU如何区分?2024-01-27 2823
-
GD32 MCU的选项字节是什么?2024-01-17 3536
-
你了解GD32 MCU的命名规则吗2024-01-13 8132
-
《GD32 MCU原理及固件库开发指南》+读后感2023-06-06 1768
-
《GD32 MCU原理及固件库开发指南》 + 初读感悟2023-03-31 2187
-
兆易创新GD32 MCU选型手册,适用于GD32全系列MCU2022-10-19 2788
-
GD32的MCU介绍2021-11-01 2339
全部0条评论

快来发表一下你的评论吧 !
