

 第14章-蓝牙遥控小车 蓝牙串口通讯讲解蓝牙APP遥控小车 蓝牙串口通讯讲解
第14章-蓝牙遥控小车 蓝牙串口通讯讲解蓝牙APP遥控小车 蓝牙串口通讯讲解
电子说
描述
功能介绍放开头, 使用便捷无需愁
这是全网最详细、性价比最高的STM32实战项目入门教程,通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。让你更快掌握嵌入式系统开发。
**V3.3.0-STM32智能小车 **
**视频: **[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click]
**V3:HAL库开发、功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。 **
本文讲解手机蓝牙如何遥控小车,如何编写串口通信指令
第14章-手机遥控功能
我们要实现蓝牙遥控功能,蓝牙遥控功能要使用:1.单片机的串口、2.蓝牙通信模块
所以我们先调试好:单片机的串口->蓝牙模块->接到一起联调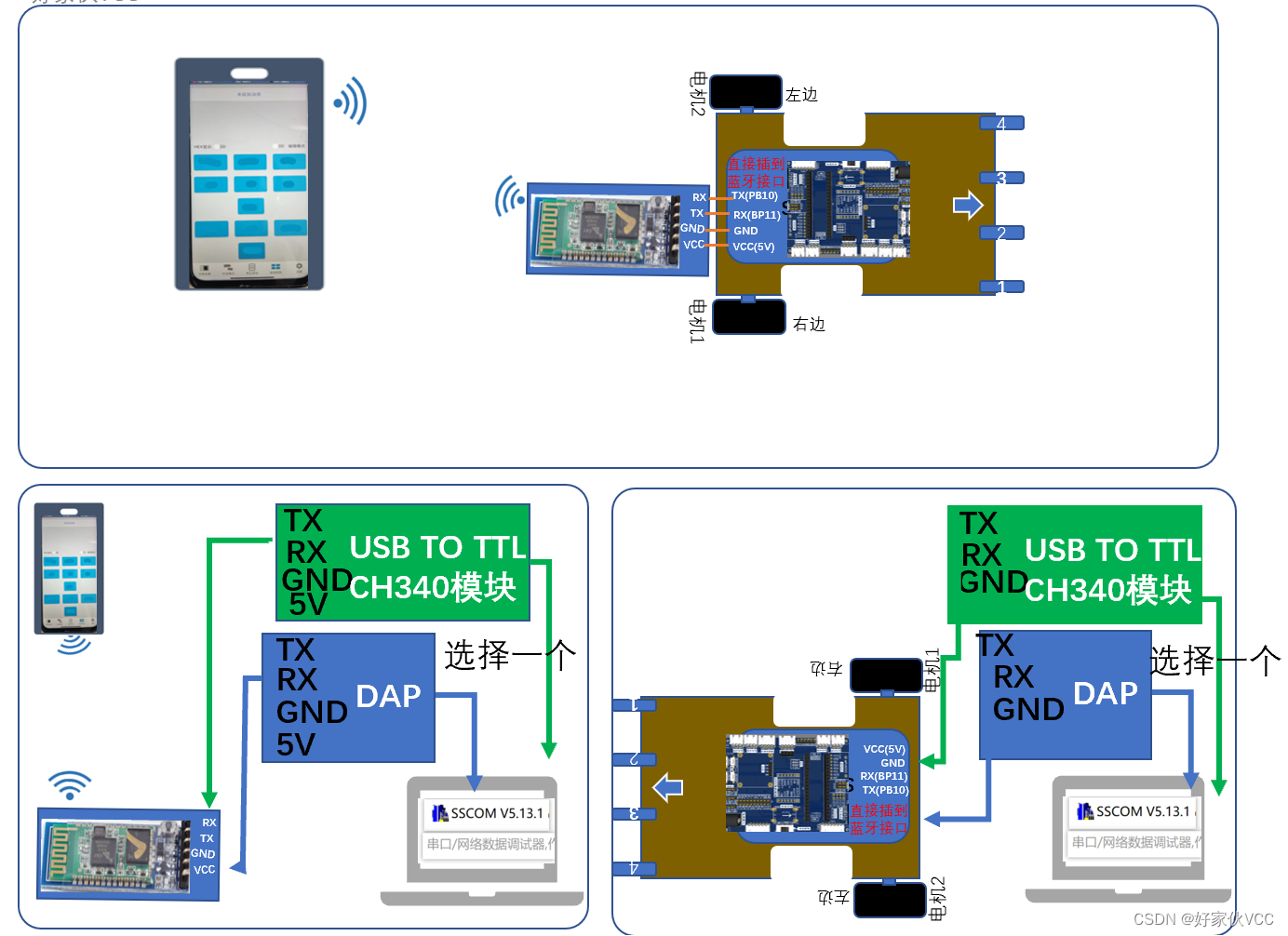
14.1-电脑控制小车
完成功能:电脑连接单片机串口三 控制小车前进后退
先看原理图
通过原理图可以看出这是使用的串口3 在使用的时候注意把跳线帽,跳线到蓝牙通信位置
打开初始化软件

生成代码
在main 定义全局变量
uint8_t g_ucUsart3ReceiveData; //保存串口三接收的数据
开启串口三中断接收
HAL_UART_Receive_IT(&huart3,&g_ucUsart3ReceiveData,1); //串口三接收数据
在****usart.c 重新实现串口中断回调函数**
**
然后我们可以在中断回调函数里面中编写遥控命令控制逻辑了
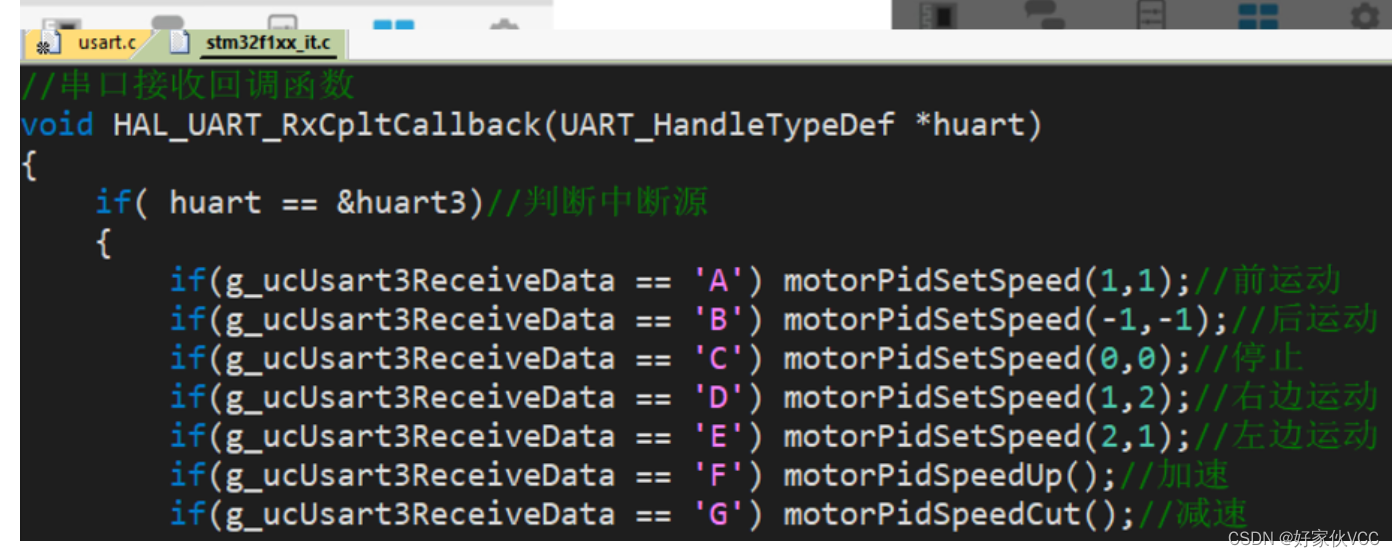
//串口接收回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if( huart == &huart3)//判断中断源
{
if(g_ucUsart3ReceiveData == 'A') motorPidSetSpeed(1,1);//前运动
if(g_ucUsart3ReceiveData == 'B') motorPidSetSpeed(-1,-1);//后运动
if(g_ucUsart3ReceiveData == 'C') motorPidSetSpeed(0,0);//停止
if(g_ucUsart3ReceiveData == 'D') motorPidSetSpeed(1,2);//右边运动
if(g_ucUsart3ReceiveData == 'E') motorPidSetSpeed(2,1);//左边运动
if(g_ucUsart3ReceiveData == 'F') motorPidSpeedUp();//加速
if(g_ucUsart3ReceiveData == 'G') motorPidSpeedCut();//减速
HAL_UART_Receive_IT( &huart3, &g_ucUsart3ReceiveData, 1);//继续进行中断接收
}
}
在usart.c中声明外部变量
extern uint8_t g_ucUsart3ReceiveData; //保存串口三接收的数据
然后我们更改一下 主函数内容,把PID红外循迹代码注释掉,然后我们增加串口三的输出,以便我们后面观察数据。
串口不定长输出
我们把转速等信息都可以显示在OLED上,那么如何通过串口输出那?
sprintf((char *)Usart3String,"V1:%.2fV2:%.2frn",Motor1Speed,Motor2Speed);//显示两个电机转速 单位:转/秒
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"Mileage%.2frn",Mileage);//计算小车里程 单位cm
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"U:%.2fVrn",adcGetBatteryVoltage());//显示电池电压
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
HAL_Delay(5);
把之前PID初始化时候速度PID目标值改成0
然后我们测试
硬件连接
我们现在使用USB-TTL连接串口三,单片机串口三与电脑通信(底板不需要插入蓝牙 )**
**
然后打开软件
发送指令小车就会对应运动
在电脑串口软件查看输出信息、发送 指令控制小车运动
14.2-手机蓝牙控制小车
功能:蓝牙遥控小车前进、后退、停止、左右转、加速、减速、手机显示数据
蓝牙模块和电脑通信
蓝牙模块-硬件介绍
**使用:HC-05 主从机一体蓝牙串口透传模块 **
注意: 供电3.6V-6V(最好5V)
引脚顺序 VCC GND TXD RXD



先调试蓝牙模块-设置波特率
如图先把蓝牙模块通过USB-TTL模块相连接,然后
如果反复测试不能进入AT模式,可能是新版蓝牙模块,
- 先连接好蓝牙模块的几根线,然后按住蓝牙模块的按键
- 然后连接电脑,然后几秒后蓝牙小灯慢闪,说明进入AT模式
- 然后串口助手通过38400发送设置指令:AT+UART=115200,0,0
- 然后收到OK数据,说明设置成功。
这个是设置波特率截图
- 然后重新拔插蓝牙模块(不用按按键)
- 在手机系统蓝牙配对HC-50 密码1234
- 串口助手设置波特率115200,然后打开手机APP发送任意内容测试
这个是后面通信测试截图
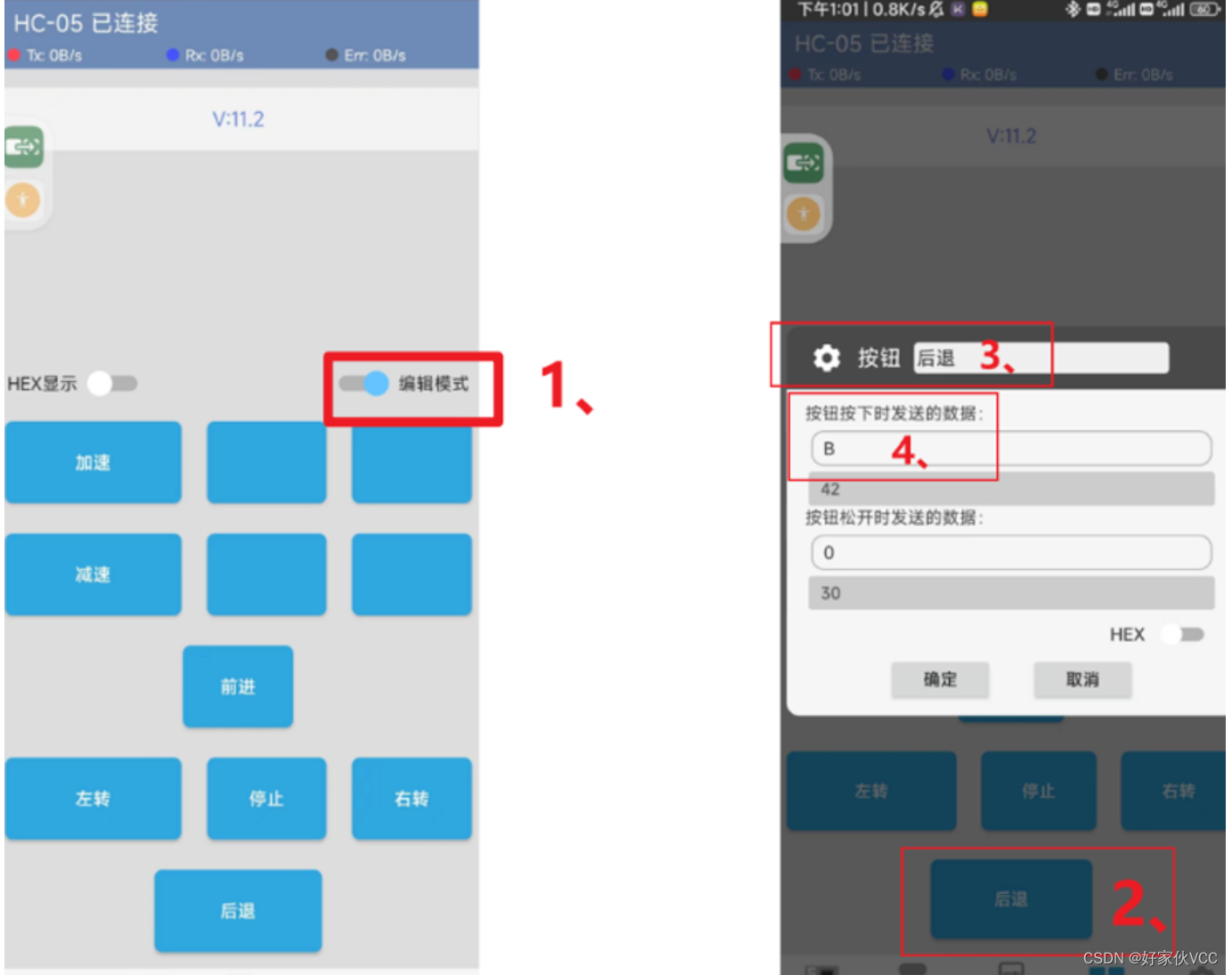
- 设置按键-按照代码设置按下发送的数据
9.


蓝牙模块连接单片机
把蓝牙插入到底板、跳线帽选择蓝牙通信
按下不同按钮小车会对应控制
审核编辑 黄宇
-
如何通过手机APP和蓝牙模块实现对平衡小车的控制2022-01-21 2190
-
讲解蓝牙小车的程序部分2022-01-05 1427
-
STM32F103RCT6 实验代码之舵机+超声波避障小车(三)蓝牙遥控2021-12-14 1267
-
最简单DIY的51蓝牙遥控小车设计方案是什么2021-12-01 2028
-
最简单DIY的51蓝牙遥控小车设计方案2021-11-23 1399
-
HC05蓝牙模块对小车的蓝牙遥控2021-11-22 1966
-
【制作】基于51单片机的蓝牙遥控小车方案2021-11-11 1562
-
STM32蓝牙遥控2021-08-03 1515
-
基于单片机的蓝牙小车带蓝牙遥控的程序2018-06-05 1522
-
蓝牙遥控小车程序2017-03-31 2426
-
基于STM32蓝牙遥控小车2016-10-13 16506
-
蓝牙遥控小车教程2016-06-03 1289
-
DIY 制作蓝牙遥控小车2013-05-05 64826
全部0条评论

快来发表一下你的评论吧 !
