

 第16章-超声波跟随功能 基于STM32的三路超声波自动跟随小车 毕业设计 课程设计
第16章-超声波跟随功能 基于STM32的三路超声波自动跟随小车 毕业设计 课程设计
电子说
1.4w人已加入
描述
功能介绍放开头, 使用便捷无需愁
这是全网最详细、性价比最高的STM32实战项目入门教程,通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。让你更快掌握嵌入式系统开发。
V3.3.0-STM32智能小车
视频: https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click
V3:HAL库开发、功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。
第16章-超声波跟随功能
无PID跟随功能
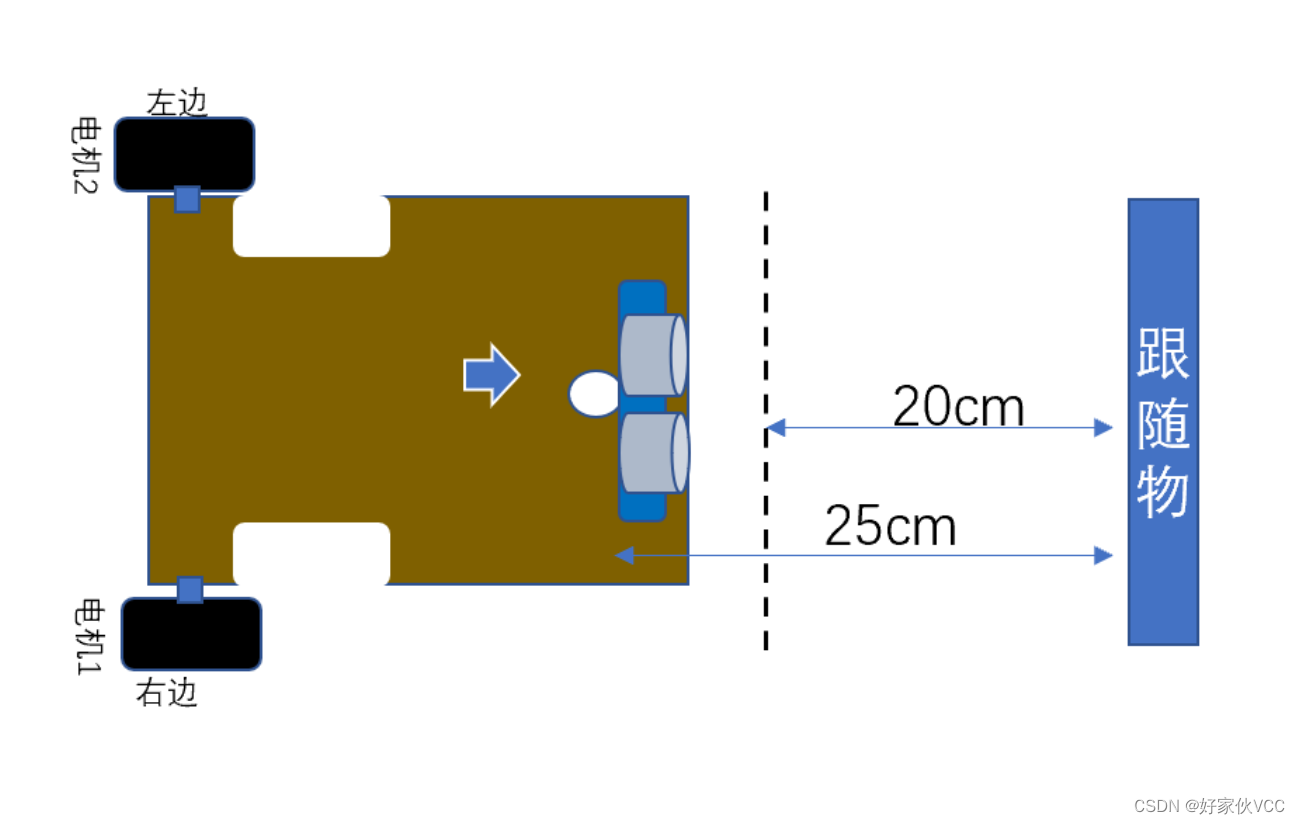

//超声波跟随
if(HC_SR04_Read() > 25)
{
motorForward();//前进
HAL_Delay(100);
}
if(HC_SR04_Read() < 20)
{
motorBackward();//后退
HAL_Delay(100);
}
PID跟随功能

在pid.c中定义一组PID参数
tPid pidFollow; //定距离跟随PID
pidFollow.actual_val=0.0;
pidFollow.target_val=22.50;//定距离跟随 目标距离22.5cm
pidFollow.err=0.0;
pidFollow.err_last=0.0;
pidFollow.err_sum=0.0;
pidFollow.Kp=-0.5;//定距离跟随的Kp大小通过估算PID输入输出数据,确定大概大小,然后在调试
pidFollow.Ki=-0.001;//Ki小一些
pidFollow.Kd=0;

//**********PID跟随功能***********//
g_fHC_SR04_Read=HC_SR04_Read();//读取前方障碍物距离
if(g_fHC_SR04_Read < 60){ //如果前60cm 有东西就启动跟随
g_fFollow_PID_Out = PID_realize(&pidFollow,g_fHC_SR04_Read);//PID计算输出目标速度 这个速度,会和基础速度加减
if(g_fFollow_PID_Out > 6) g_fFollow_PID_Out = 6;//对输出速度限幅
if(g_fFollow_PID_Out < -6) g_fFollow_PID_Out = -6;
motorPidSetSpeed(g_fFollow_PID_Out,g_fFollow_PID_Out);//速度作用与电机上
}
else motorPidSetSpeed(0,0);//如果前面60cm 没有东西就停止
HAL_Delay(10);//读取超声波传感器不能过快

然后编译,烧录测试 。
下一章节 我们开始使用6050 讲解6050使用和如何和PID结合一起
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
第七章-V1.5 STM32超声波测距STM32F103C8t6超声波避障小车 超声波避障模块 STM32超声波测距2024-08-15 3027
-
怎样去设计一个基于STM32三路超声波避障小车2022-02-24 1557
-
基于STM32三路超声波避障小车2022-01-12 1579
-
怎样去设计一个基于STM32的三路超声波自动跟随小车2022-01-05 1799
-
stm32捕获占空比_基于STM32超声波避障小车2021-11-22 1510
-
基于单片机的超声波测距系统实现2021-11-10 2296
-
多点超声波测距报警系统2020-02-26 2958
-
带温度补偿的超声波测距2019-05-31 2395
-
基于STM32超声波测距设计的合集2018-09-05 11547
-
基于STM32的超声波使用2016-08-09 1298
-
STM32超声波测距模块资料2016-07-15 930
-
超声波单片机超声波单片机超声波单片机超声波单片机超声波单片机超声波2016-04-14 5628
-
基于labview的超声波探伤2014-05-20 4067
全部0条评论

快来发表一下你的评论吧 !
