
资料下载


×
基于【K60 OV7620 BTS7960 蓝牙串口】智能车双线
消耗积分:2 |
格式:zip |
大小:15011KB |
2017-03-23
黄佰凡
分享资料个
基于【K60 OV7620 BTS7960 蓝牙串口】智能车双线循迹驱动程序
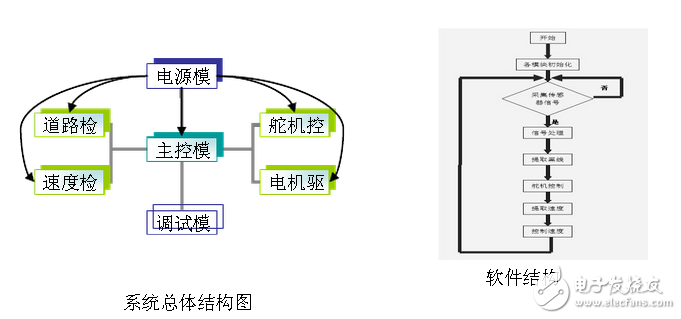
该车主要由摇头伺服电机和激光传感器构成的道路检测随动子
系统,
驱动电机以及机械传动齿轮构成的动力子系统,
连杆机构以及
转向伺服电机构成的转向子系统,速度检测系统以及以飞思卡尔
XS128
为中心的电路子系统构成。结合软件
PID
控制理论完成了智
能车自主巡线的功能。
该车主要由摇头伺服电机和激光传感器构成的道路检测随动子系统,驱动电机以及机械传动齿轮构成的动力子系统,连杆机构以及转向伺服电机构成的转向子系统,速度检测系统以及以飞思卡尔XS128 为中心的电路子系统构成。结合软件PID控制理论完成了智能车自主巡线的功能。声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






