

永磁直流无刷电动机的结构详解
电子说
描述
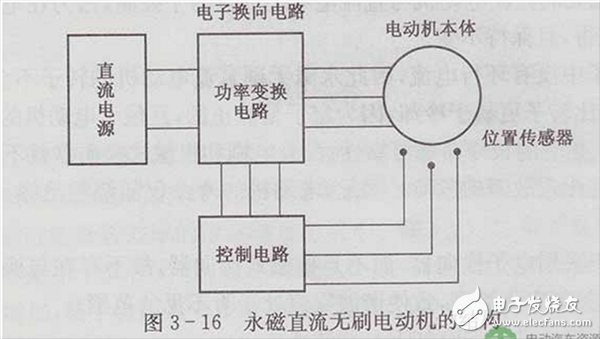
永磁无刷电动机可以看作是一台用电子换相装置取代机械换向的直流电动机,如图3 -16所示,永磁直流无刷电动机主要由永磁电动机本体、转子位置传感器和电子换向电路组成。无论是结构或控制方式,永磁直流无刷电动机与传统的直流电动轿车电机都有很多相似之处:用装有永磁体的转子取代有刷直流电动机的定子磁极;用具有多相绕组的定子取代电枢;用由固态逆变器和轴位置检测器组成的电子换向器取代机械换向器和电刷。
1.电动机本体
电动机本体和永磁同步电动机(PMSM)相似,转子采用永久磁铁,目前多使用稀土永磁材料,但没有笼式绕组和其他启动装置。其定子绕组采用交流绕组形式,一般制成多相(三相、四相或五相),转子由永久磁钢按一定极对数(2P=2,4,6)组成。设计中要求在定子绕组中获得顶宽为1 200的梯形波,因此绕组形式往往采用整距、集中或接近整距、集中的形式,以便保留磁密中的其他谐波。有刷直流电动机是依靠机械换向器将直流电流转换为近似梯形波的交流电流供给电枢绕组,而无刷纯电动汽车直流电动机是依靠电子换向器将方波电流(由于绕组电感的作用?实际上也是梯形波)按一定的相序逐次输入到定子的各相电枢绕组中。当无刷直流电动机定子绕组的某相通电时,该相电流产生的磁场与转子永久磁铁所产生的磁场相互作用而产生转矩,驱动转子旋转。位置传感器将转子磁铁位置变换成电信号去控制电子开关线路,从而使定子的各相绕组按一定的次序导通,使定子的相电流随转子位置的变化而按正确的次序换相。
这样才能让定子磁场随转子的旋转不断地变化,产生与转子转速同步的旋转磁场,并使定子磁场与转子的磁场始终保持900左右的空间角,用最大转矩推动转子旋转。由于电子升关线路的导通次序与转子转角同步,起到机械换向器的换向作用,保证了电动机在运行过程中定子与转子的磁场始终保持基本垂直,以提高运行效率。所以无刷直流电动机就其基本结构而言,可以认为是一台由电子开关换相电路、永磁式同步电动汽车电机以及位置传感器三者组成的“自同步电动机系统,它在运行过程中不会失步。永磁无刷电动机BLDCM的转子结构既有传统的内转子结构,又有近年来出现的盘式结构、外转子结构和线性结构等新型结构形式。伴随着新型永磁材料的实用化,电动机转子的结构越来越多样化,使永磁无刷电动机BLDCM正朝着高出力、高精度、微型化和耐环境等多种用途发展。
2.转子位置传感器
电动汽车电机转子位置传感器有光电式、磁敏式和电磁式三种类型。采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子装有遮光板,光源为发光二极管或小灯泡。转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇发出脉冲信号。磁敏式位置传感器是指它的某些电参数随周围磁场按一定规律变化的半导体敏感元件,其基本原理为霍尔效应和磁阻效应。磁敏元件的主要工作原理是电流的磁效应,主要是霍尔效应。采用磁敏式位置传感器的元刷直流电动机,其磁敏传感器件(如霍尔元件、磁敏二极管、磁敏三极管、磁敏电阻器或专用集成电路)装在定子组件上,用并检测永磁体、转子旋转时产生的磁场变化。采用电磁式位置传感器的无刷直流电动机,是在定子组件上安装电磁传感器部件(如耦合变压器、开关、LC谐振电路等),当永磁体转子位置发生变化时,电磁效应将使电磁传感器产生高频调制信号(其幅值随转子位置的变化而变化)。
近年来还出现了无位置传感器的无刷直流电动机,此种电动机利用定子绕组的反电动势作为转子磁铁的位置信号,该信号检出后,经数字电路处理,送给逻辑开关电路去控制无刷直流电动机的换向。由于它省去了位置传感器,使得无刷电动机的结构更加紧凑,所以应用日趋广泛。
3.电子换向电路
电子换向电路由功率变换电路和控制电路两大部分组成,它与位置传感器相配合,控制电动机定子各相绕组的通电顺序和时间,起到与机械换向类似的作用。当系统运行时,功率变换器接受控制电路的控制信息,将系统工作电源的功率以一定的逻辑关系分配给直流无刷电动机定子上的各相绕组,以便使电动机产生持续不断的转矩。逆变器将直流电流转换成交流电流向电动机供电,与一般逆变器不同,它的输出频率不是独立调节的’而是受控于转子位置信号,是一个“自控式逆变器”o永磁无刷电动机由于采用自控式逆变器,电动机输入电流的频率和电动机转速始终保持同步,电动机和逆变器不会产生振荡和失步,这也是永磁无刷电动机BLDCM的显著优点之一。
纯电动汽车电动机各相绕组导通的顺序和时间主要取决于来自位置传感器的信号,但位置传感器所产生的信号一般不能直接用来驱动功率变换器的功率开关元件,往往需要经过控制电路进行逻辑处理、隔离放大后才能驱动功率变换器的开关元件。驱动控制电路的作用是将位置传感器监测到的转子位置信号进行处理,按一定的逻辑代码输出,去触发功率开关管。
- 相关推荐
- 热点推荐
- 无刷电动机
-
永磁无刷电动机的结构,原理与特性2023-12-26 3772
-
永磁同步电动机与直流无刷电动机有何异同2023-12-20 5492
-
直流无刷电动机2022-03-07 5943
-
Ansoft软件在无刷永磁直流电动机优化设计中的应用2021-08-31 1160
-
无刷直流永磁电动机(BLDCM)与自控式永磁同步电动机(PMSM)有何区别2021-08-02 3740
-
永磁无刷直流电动机讲解PPT课件下载2021-07-12 1701
-
永磁无刷电动机的结构是什么?2019-10-16 3669
-
电动轿车永磁无刷电动机的组成部分2018-10-10 2575
-
基于AT89C2051的稀土永磁无刷直流电动机控制系统设计2017-08-30 1394
-
直流无刷电动机的应用2016-08-08 3688
-
直流无刷电动机原理与技术应用2011-02-11 4033
-
永磁无刷直流电动机图文集2010-12-05 9757
-
永磁无刷电动机简介2008-11-25 5416
-
无刷直流电动机的结构示意图原理图2008-11-20 13390
全部0条评论

快来发表一下你的评论吧 !
