

单片机如何设计防抖动程序(源代码),单片机高阻态怎样克服?开发板死机程序跑飞该如何解决?
嵌入式软件/开发板
描述
单片机按键去抖动程序_单片机按键消抖程序汇编
通常按键所用的开关都是机械弹性开关,当机械触点断开、闭合时,由于机械触点的弹性作用,一个按键开关在闭合时不会马上就稳定的接通,在断开时也不会一下子彻底断开,而是在闭合和断开的瞬间伴随了一连串的抖动,如图 8-10 所示。

图 8-10 按键抖动状态图
按键稳定闭合时间长短是由操作人员决定的,通常都会在 100ms 以上,刻意快速按的话能达到 40-50ms 左右,很难再低了。抖动时间是由按键的机械特性决定的,一般都会在 10ms以内,为了确保程序对按键的一次闭合或者一次断开只响应一次,必须进行按键的消抖处理。当检测到按键状态变化时,不是立即去响应动作,而是先等待闭合或断开稳定后再进行处理。按键消抖可分为硬件消抖和软件消抖。
硬件消抖就是在按键上并联一个电容,如图 8-11 所示,利用电容的充放电特性来对抖动过程中产生的电压毛刺进行平滑处理,从而实现消抖。但实际应用中,这种方式的效果往往不是很好,而且还增加了成本和电路复杂度,所以实际中使用的并不多。
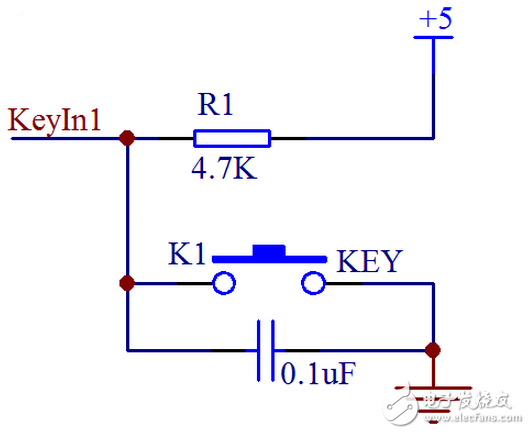
图 8-11 硬件电容消抖
在绝大多数情况下,我们是用软件即程序来实现消抖的。最简单的消抖原理,就是当检测到按键状态变化后,先等待一个 10ms 左右的延时时间,让抖动消失后再进行一次按键状态检测,如果与刚才检测到的状态相同,就可以确认按键已经稳定的动作了。将上一个的程序稍加改动,得到新的带消抖功能的程序如下。
#include
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
sbit KEY1 = P2^4;
sbit KEY2 = P2^5;
sbit KEY3 = P2^6;
sbit KEY4 = P2^7;
unsigned char code LedChar[] = { //数码管显示字符转换表
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
void delay();
void main(){
bit keybuf = 1; //按键值暂存,临时保存按键的扫描值
bit backup = 1; //按键值备份,保存前一次的扫描值
unsigned char cnt = 0; //按键计数,记录按键按下的次数
ENLED = 0; //选择数码管 DS1 进行显示
ADDR3 = 1;
ADDR2 = 0;
ADDR1 = 0;
ADDR0 = 0;
P2 = 0xF7; //P2.3 置 0,即 KeyOut1 输出低电平
P0 = LedChar[cnt]; //显示按键次数初值
while (1){
keybuf = KEY4; //把当前扫描值暂存
if (keybuf != backup){ //当前值与前次值不相等说明此时按键有动作
delay(); //延时大约 10ms
if (keybuf == KEY4){ //判断扫描值有没有发生改变,即按键抖动
if (backup == 0){ //如果前次值为 0,则说明当前是弹起动作
cnt++; //按键次数+1
//只用 1 个数码管显示,所以加到 10 就清零重新开始
if (cnt 》= 10){
cnt = 0;
}
P0 = LedChar[cnt]; //计数值显示到数码管上
}
backup = keybuf; //更新备份为当前值,以备进行下次比较
}
}
}
}
/* 软件延时函数,延时约 10ms */
void delay(){
unsigned int i = 1000;
while (i--);
}大家把这个程序下载到板子上再进行试验试试,按一下按键而数字加了多次的问题是不是就这样解决了?把问题解决掉的感觉是不是很爽呢?
这个程序用了一个简单的算法实现了按键的消抖。作为这种很简单的演示程序,我们可以这样来写,但是实际做项目开发的时候,程序量往往很大,各种状态值也很多, while(1)这个主循环要不停的扫描各种状态值是否有发生变化,及时的进行任务调度,如果程序中间加了这种 delay 延时操作后,很可能某一事件发生了,但是我们程序还在进行 delay 延时操作中,当这个事件发生完了,程序还在 delay 操作中,当我们 delay 完事再去检查的时候,已经晚了,已经检测不到那个事件了。为了避免这种情况的发生,我们要尽量缩短 while(1)循环一次所用的时间,而需要进行长时间延时的操作,必须想其它的办法来处理。
那么消抖操作所需要的延时该怎么处理呢?其实除了这种简单的延时,我们还有更优异的方法来处理按键抖动问题。举个例子:我们启用一个定时中断,每 2ms 进一次中断,扫描一次按键状态并且存储起来,连续扫描 8 次后,看看这连续 8 次的按键状态是否是一致的。8 次按键的时间大概是 16ms,这 16ms 内如果按键状态一直保持一致,那就可以确定现在按键处于稳定的阶段,而非处于抖动的阶段,如图 8-12。

图 8-12 按键连续扫描判断
假如左边时间是起始 0 时刻,每经过 2ms 左移一次,每移动一次,判断当前连续的 8 次按键状态是不是全 1 或者全 0,如果是全 1 则判定为弹起,如果是全 0 则判定为按下,如果0 和 1 交错,就认为是抖动,不做任何判定。想一下,这样是不是比简单的延时更加可靠?
利用这种方法,就可以避免通过延时消抖占用单片机执行时间,而是转化成了一种按键状态判定而非按键过程判定,我们只对当前按键的连续 16ms 的 8 次状态进行判断,而不再关心它在这 16ms 内都做了什么事情,那么下面就按照这种思路用程序实现出来,同样只以K4 为例。
#include
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
sbit KEY1 = P2^4;
sbit KEY2 = P2^5;
sbit KEY3 = P2^6;
sbit KEY4 = P2^7;
unsigned char code LedChar[] = { //数码管显示字符转换表
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
bit KeySta = 1; //当前按键状态
void main(){
bit backup = 1; //按键值备份,保存前一次的扫描值
unsigned char cnt = 0; //按键计数,记录按键按下的次数
EA = 1; //使能总中断
ENLED = 0; //选择数码管 DS1 进行显示
ADDR3 = 1;
ADDR2 = 0;
ADDR1 = 0;
ADDR0 = 0;
TMOD = 0x01; //设置 T0 为模式 1
TH0 = 0xF8; //为 T0 赋初值 0xF8CD,定时 2ms
TL0 = 0xCD;
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
P2 = 0xF7; //P2.3 置 0,即 KeyOut1 输出低电平
P0 = LedChar[cnt]; //显示按键次数初值
while (1){
if (KeySta != backup){ //当前值与前次值不相等说明此时按键有动作
if (backup == 0){ //如果前次值为 0,则说明当前是弹起动作
cnt++; //按键次数+1
if (cnt 》= 10){ //只用 1 个数码管显示,所以加到 10 就清零重新开始
cnt = 0;
}
P0 = LedChar[cnt]; //计数值显示到数码管上
}
//更新备份为当前值,以备进行下次比较
backup = KeySta;
}
}
}
/* T0 中断服务函数,用于按键状态的扫描并消抖 */
void InterruptTimer0() interrupt 1{
//扫描缓冲区,保存一段时间内的扫描值
static unsigned char keybuf = 0xFF;
TH0 = 0xF8; //重新加载初值
TL0 = 0xCD;
//缓冲区左移一位,并将当前扫描值移入最低位
这个算法是我们在实际工程中经常使用按键所总结的一个比较好的方法,介绍给大家,今后都可以用这种方法消抖了。当然,按键消抖也还有其它的方法,程序实现更是多种多样,大家也可以再多考虑下其它的算法,拓展下思路。
单片机高阻态是什么意思
在一个系统中或在一个整体中,我们往往定义了一些参考点,就像我们常常说的海平面,在单片中也是如此,我们无论说是高电平还是低电平都是相对来说的。
在51单片机,没有连接上拉电阻的P0口相比有上拉电阻的P1口在I/O口引脚和电源之间相连是通过一对推挽状态的FET来实现的,51具体结构如下图。
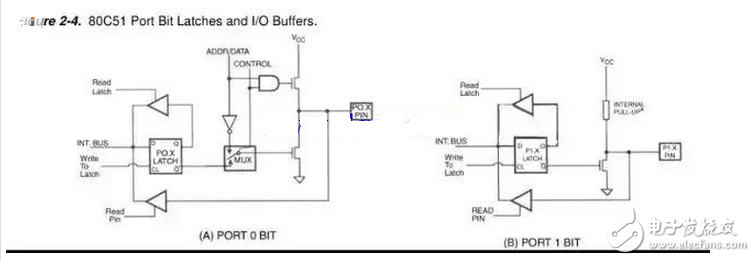
51结构图
组成推挽结构,从理论上讲是可以通过调配管子的参数轻松实现输出大电流,提高带载能力,两个管子根据通断状态有四种不同的组合,上下管导通相当于把电源短路了,这种情况下在实际电路中绝对不能出现,从逻辑电路上来讲,上管开-下管关开时IO与VCC直接相连,IO输出低电平0,这种结构下如果没有外接上拉电阻,输出0就是开漏状态(低阻态),因为I/O引脚是通过一个管子接地的,并不是使用导线直接连接,而一般的MOS在导通状态也会有mΩ极的导通电阻。
排阻
无论是低阻态还是高阻态都是相对来说的,把下管子置于截止状态就可以把GND和I/O口隔离达到开路的状态,这时候推挽一对管子是截止状态,忽略读取逻辑的话I/O口引脚相当于与单片机内部电路开路,考虑到实际MOS截止时会有少许漏电流,就称作“高阻态”
由于管子PN节带来的结电容的影响,有的资料也会称作“浮空”,通过I/O口给电容充电需要一定的时间,那么IO引脚处的对地的真实电压和水面浮标随波飘动类似了,电压的大小不仅与外界输入有关还和时间有关,在高频情况下这种现象是不能忽略的。
单片机程序死机,跑飞了可以从以下几个方面查找原因:
1、意外中断。是否打开了某个中断,但是没有响应和清除中端标志,导致程序一直进入中断,造成死机假象;
2、中断变量处理不妥。若定义某些会在中断中修改的全局变量,这时要注意两个问题:首先为了防止编译器优化中断变量,要在这些变量定义时前加volatile,其次在主循环中读取中断变量前应该首先关闭全局中断,防止读到一半被中断给修改了,读完之后再打开全局中断;否则出现造成数据乱套。
3、地址溢出,常见错误为指针操作错误。我要着重说的是数组下标使用循环函数中循环变量,如果循环变量没控制好则会出现数组下标越界,意外修改系统的寄存器造成死机,这种情况下如果死机说明运气好,否则后面不知道发生什么头疼的事。
4、无条件的死循环;比如使用while(x);等待电平变化,正常情况下x都会变成0,就怕万一,因此最好加上时间限制;
5、看门狗没有关闭。有的单片机即使没使用看门狗开机时也有可能意外自动开启了最小周期的看门狗,导致软件不断复位,造成死机,这个要看芯片手册,最好在程序复位后首先应该显式清除看门狗再关闭看门狗;
6、堆栈溢出。最难查找的问题,对于容量小的单片机,尽量减少函数调用层级,减少局部变量,从而减少压栈的时候所需的空间。当你把以上几条都试过不能解决问题,试一试把你的被调用少函数直接内置到调用的地方并且把占用RAM大的局部变量改成全局变量,试一试说不定就可以了。
-
单片机程序跑飞死机的几种原因分享2026-01-21 161
-
单片机烧录程序的基本步骤是什么2024-09-02 5159
-
单片机程序又跑飞?从这6个方面查找原因2023-10-26 2402
-
单片机程序跑飞的三种现象、原因及解决方法2022-02-08 2277
-
单片机意外死机,意外复位,程序跑飞2021-11-24 925
-
单片机开发小程序2021-11-13 1074
-
致单片机程序总是跑飞怎么办2021-09-26 7684
-
单片机程序为什么会死机跑飞资料下载2021-04-23 1087
-
单片机程序死机,可能是这几个原因2020-06-19 10097
-
使用单片机实现音乐播放器的源代码程序免费下载2019-04-17 2428
-
51单片机开发板简单程序2016-07-20 760
-
基于51单片机的IIC 程序源代码2015-11-16 900
-
单片机程序总跑飞?小技巧帮你忙2015-04-02 8980
全部0条评论

快来发表一下你的评论吧 !
