

基于二阶广义积分器的永磁同步电机定子磁链观测方法介绍
电子说
描述
引言
永磁同步电机因其结构简单、维护成本低、效率高等优点而在风力发电、电动汽车驱动等领域得到广泛应用。
永磁同步电机的直接转矩控制实现简单、无需坐标变换,并可以获得快速的动态响应速度,因此在电动汽车驱动领域得到广泛应用。定子磁链观测是实现永磁同步电机直接转矩控制的基础。
现有的永磁同步电机定子磁链观测方案主要分为两大类:(1)基于数学模型的磁链观测方案;(2)基于状态观测器的磁链观测方案。
基于数学模型的磁链观测方案有:电流模型、电压模型和混合模型[1]。电流模型在低转速时性能较好;但对电机参数敏感,其估算磁链的精度建立在电机参数准确的基础上。传统的电压模型是对反电动势直接积分,具有结构简单,对参数依赖性小等优点;但纯积分电压模型存在直流偏置和初始值误差累积问题。为了消除这些误差,相关文献采用了低通滤波器代替纯积分器[2]、饱和双反馈积分器[3-4]、低通滤波补偿积分器[5-7]等策略加以改进。
基于状态观测器的磁链观测方案主要有:滑模观测器[8]、扩展卡尔曼滤波[9]、全阶状态观测器[10-11]和降阶状态观测器[12]。滑模观测器是一种变结构控制系统,能够抵抗参数扰动的影响;但滑模观测器本质上是不连续的开关控制,会引起系统抖动。基于卡尔曼滤波的方法鲁棒性较强,但算法复杂、工程实现较为困难。基于全阶状态观测器实现的永磁同步电机定子磁链观测器存在观测器增益难以设计的问题。
本文基于ISOGI,提出了一种改进的永磁同步电机定子磁链观测方法。给出了基于ISOGI的定子磁链观测器的实现方法,并与传统的电压模型定子磁链观测算法进行了比较。最后通过仿真和实验验证了所提定子磁链观测器的可行性。
1 基于ISOGI的定子磁链观测器
永磁同步电机直接转矩控制的基础就是定子磁链和电磁转矩的观测,而电磁转矩观测的基础也是定子磁链的观测,因此,本文提出一种基于ISOGI的永磁同步电机定子磁链观测器,以解决传统的电压模型定子磁链观测器存在的问题,提高直接转矩控制的精度。
1.1 磁链观测器的原理
电压模型是交流调速系统中磁链观测的基本方法,它具有算法简单、对电机参数依赖小等优点。本文采用基于电压模型的定子磁链观测器,来获得永磁同步电机直接转矩控制所需要的定子磁链和电磁转矩。
电压模型基于静止坐标系αβ轴电压与电流计算定子磁链,满足
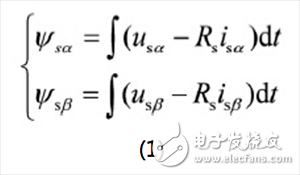
式(1)中:为定子磁链的αβ轴分量;μsα,μsβ为定子电压的αβ轴分量;isα,isβ为定子电流的αβ轴分量,Rs为定子电阻。
在电压模型中,定子磁链主要通过对反电势信号的积分得到,该方法只需要用到电机的定子电阻,而其数值相对较小,对磁链观测影响不大。但是,其中需要引入一个纯积分环节,而纯积分环节受积分初始值和积分漂移的影响。为此,一般用低通滤波器来代替纯积分器,虽然其解决了上述问题,但低通滤波器的引入不可避免地带来了幅值和相位误差。为此本文提出了一种基于ISOGI的定子磁链观测器。
1.2 ISOGI的实现及其性能
二阶广义积分器(second-order generalized integrator, SOGI)常应用在谐振控制器及正负序分离等场合中对交流信号进行处理,本文对SOGI进行改进可以实现磁链观测功能,从而可以得到基于ISOGI的磁链观测器。ISOGI的传递函数为
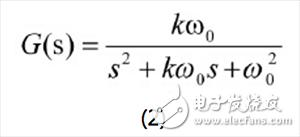
式中:k为增益系数;ω0为定子角速度。
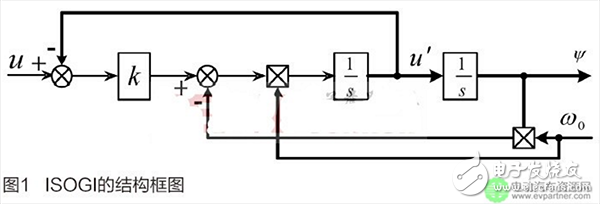
采用输出反馈的方法得到ISOGI实现形式如下式所示。
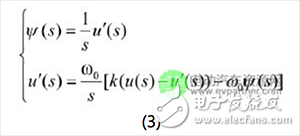
对于输入正弦信号,ISOGI是一个频率自适应积分器,其结构框图如图1所示。
若输入频率为ω的信号,此传递函数的幅频和相频特性如下

由式(4)可得,稳态ω=ω0时,有|G|=1/ω0,说明ISOGI可以实现在输入频率ω0处的幅值增益为1/ω0;同时,可以看出相角关系∠G=﹣π/2,说明输出信号比输入信号滞后90?。因此,ISOGI环节可以对频率为ω0的输入信号实现纯积分作用。
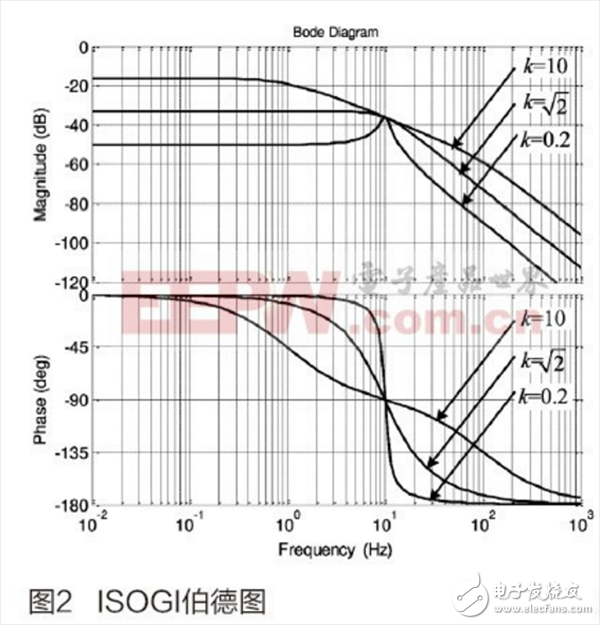
ISOGI的伯德图如图2所示,其中,输入频率ω0取10*2πrad/s,k分别取0.2、和10。
从图2中可以看出,当取不同的增益系数k时,ISOGI环节在输入频率处的幅值增益始终为1/ω0,相位始终为﹣90?,满足纯积分器的特性。
由图2可知,增益系数k的大小决定ISOGI环节的性能。当增益系数k较小时其表现为带通滤波器特性,对输入频率的选择性较好;而当增益系数k较大时其表现为低通滤波器特性,且动态响应较快。为了兼顾选择性和动态响应,增益系数k常取,实际中可以根据输入信号中谐波分布不同取合适的k值。
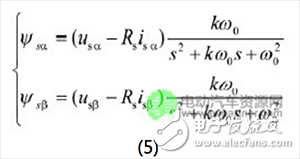
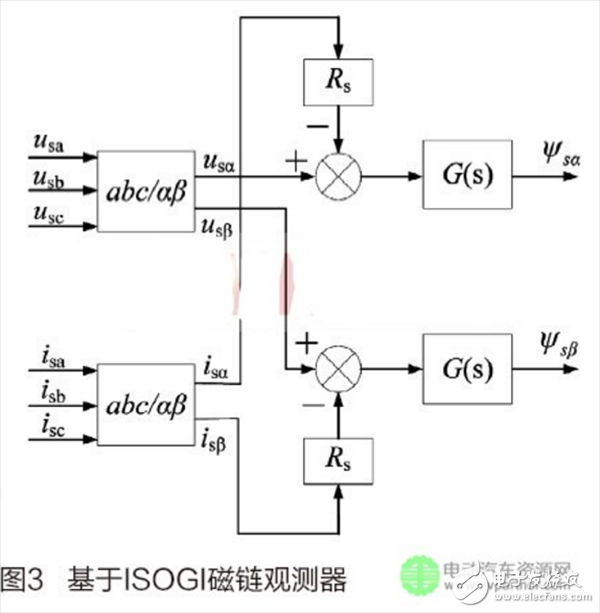
图3中的定子电压可以根据变流器的开关状态计算得到,定子电流通过电流传感器测量得到。在αβ坐标系中经过ISOGI环节可以得到定子磁链的αβ轴分量,根据得到的定子磁链还可以进一步得到电磁转矩值,如式 (6),其中,p为电机极对数。
1.3 基于ISOGI磁链观测器的实现
采用本文提出的ISOGI环节代替传统电压模型定子磁链观测器中的纯积分器,可以得到基于ISOGI的永磁同步电机定子磁链观测器,其输入输出关系如式(5)所示,对应的原理框图如图3所示。
- 相关推荐
- 永磁同步电机
-
内嵌式永磁同步电机变结构直接转矩控制及定子磁链的观测2009-04-03 502
-
永磁同步电机二阶迭代学习控制2025-03-26 0
-
锁相环二阶广义积分?2017-10-11 0
-
基于二阶广义积分器的永磁同步电机定子磁链观测方法2018-10-19 0
-
永磁同步电机的转子位置估计方法2021-08-27 0
-
如何利用永磁同步电机的电压电流模型对转子磁链进行直接观测?2021-10-21 0
-
由浅入深的介绍永磁同步电机转动的控制方法2022-10-12 0
-
主要介绍永磁同步电机参数最常用最简单的测量方法2022-10-12 0
-
利用改进的二阶广义积分器锁相环诊断感应电机转子断条故障_阳同光2017-01-08 753
-
永磁同步电机分数阶智能积分调速控制_薛薇2017-01-08 829
-
采用扩展卡尔曼滤波磁链观测器的永磁同步电机直接转矩控制2017-01-21 883
-
二阶广义积分器的性能分析和锁相环设计及预同步控制与仿真介绍2017-09-28 2954
-
基于降阶隆伯格观测器的永磁同步电机转子位置估算2021-04-02 4103
-
一种基于二阶广义积分器的永磁同步电机定子磁链观测方法资料下载2021-04-29 869
-
永磁同步电机的磁链观测原理2023-12-21 2272
全部0条评论

快来发表一下你的评论吧 !
