

物联网智能传感器的噪声与功耗
物联网
描述
对于那些为物联网应用领域开发智能传感器的人士而言,性能与功耗的关系是最微妙的权衡考虑。在广阔的性能空间中,噪声常常是一个重要的评估因素,因为它能制约智能传感器中关键功能模块的器件选择,进而提高功耗负担。此外,噪声特性在很大程度上决定了滤波要求,而这又会影响传感器对条件快速变化的响应能力,延长产生高质量测量结果所需的时间。
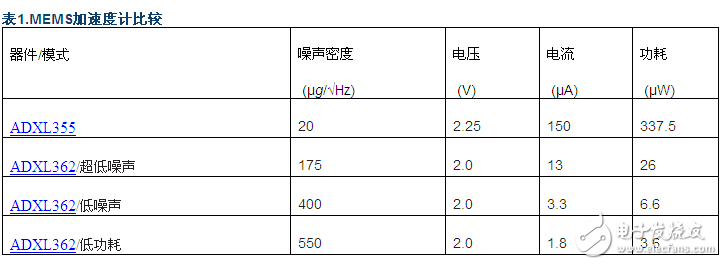
在支持连续观测(采样、处理、通信)的应用中,系统架构师常常不得不解决噪声与功耗相互对立的关系,因为噪声最低的解决方案很少正好也是功耗最低的解决方案(就特定功能类别的器件而言)。例如,MEMS加速度计常常用作远程倾斜测量系统的核心传感器。表1显示了两款不同产品的重要特性,它们提供目前在业界领先的噪声或功耗性能:ADXL355(低噪声)和ADXL362(低功耗)。
表1包括四行,其中三行对应ADXL362的可选工作模式,剩下的一行给出了ADXL355的主要指标。从这一权衡空间的关键边界开始,ADXL355的噪声比最低功耗模式的ADXL362要低几乎27倍,但前者的功耗要高得多。性能要求更具挑战性的应用可能需要考虑ADXL362的最高性能模式,此时ADXL355的噪声要低9倍,但ADXL362的功耗要低13倍。
在不需要连续观测的应用中,平均功耗与噪声的关系变得更有意义。或许令人难以置信,但噪声和功耗的关系甚至可能变成互补式。这对开发人员来说无疑是个好消息。因为在之前的设计中,开发人员可能因难以确定该让功耗还是性能主导其设计而延误了时机。而现在,无需等待其他人在这一权衡中做出决定,智能传感器架构师可自行对权衡范围内的相关选项进行量化;这一做法将重新定义架构师的工作。
智能传感器架构
为了量化特定应用的相关选项,首先需要对信号链做一些假设,因此可以从概念架构开始。图1是智能传感器架构的一般例子,其中包含了最常见的功能。
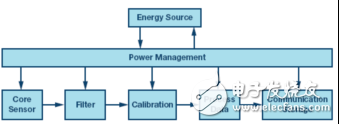
图1.智能传感器架构
核心传感器
智能传感器节点中的信号链从核心传感器功能开始。最基本形式的核心传感器也称为变换器,其将物理条件或属性转换成代表性的电信号。传感器的比例因子描述其电响应与其监控的物理属性或条件的线性关系。例如,提供模拟输出的温度传感器(如AD590)的比例因子单位为mV/°C;数字加速度计(如ADXL355)的比例因子用LSB/g或码数/g来表示。
滤波器
信号链(图1)的下一个功能模块是滤波器。这一级的作用是降低核心传感器可能支持,但与应用无关的频段中的噪声。在振动监控应用中,这可能是一个带通滤波器,它将随机振动与可能指示机器寿命减损的特定频谱特征分离开来。在倾斜传感器中,这可能是一个简单的低通滤波器,例如移动平均滤波器。这种情况下,时长是建立时间与滤波器输出残余噪声之间的一个重要权衡因素。图2显示了ADXL355艾伦方差曲线的例子,它表示相对于产生测量的均值时间,测量的不确定性(噪声)。
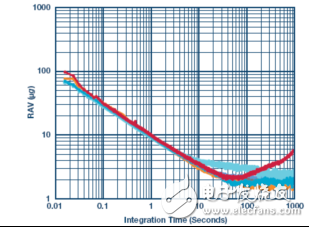
图2.艾伦方差曲线:ADXL355和ADXL362
校准
校准功能的作用是通过应用校正公式来提高测量精度。在要求极高的应用中,通常是在严格受控条件下进行测量,通过直接观测传感器响应来获得此类校正公式。例如在倾斜传感器应用中,校准过程涉及到观测MEMS加速度计在多个不同方向上相对于重力的输出。这种观测的一般目标是观测传感器对足够多取向的响应,从而求解如下关系式(参见方程1)中所有12个校正系数(m11、m12、m13、m21、m22、m23、m31、m32、m33、bx、by、bz):

方程1中的校正系数用于处理偏置、灵敏度和对准误差。此公式还可以扩展以包括更高阶传感器特性(非线性)或环境相关性(温度、电源电平)。
数据处理
数据处理功能用于将校准且滤波的传感器数据转换成适当的测量结果以对应用提供最佳支持。在振动监控系统中,这可能是简单的RMS-DC转换或带频谱报警的快速傅里叶变换(FFT)(参见ADIS16228)。在倾斜检测应用中,智能传感器会利用方程2、方程3或方程4将传感器对重力的加速度响应转换成方位角估计值。

这三个关系式分别代表使用一个、两个和三个加速度计测量结果的倾斜估计,假设各加速度计完全正交。
通信/存储
通信/存储功能支持所有物联网云服务的数据分级和连接(加密/安全、存储和分析)。
周期供电操作
电源管理(PM)功能对典型智能传感器有三个作用。第一个作用是管理信号链中所有器件的上电时序要求。第二个作用是将电源供应转换成适当的电压来支持信号链中所有器件的最优运行。最后一个作用是在以一定时间间隔进行测量的系统中,提供排程信号来触发每次测量事件。
周期供电是识别智能传感器节点中此类断续操作的常见方法。在两次测量事件之间,智能传感器处于低功耗(或零功耗)状态,这种技术有助于节能。图3显示了一个采用此技术的智能传感器在一个完整测量周期上的瞬时功耗。
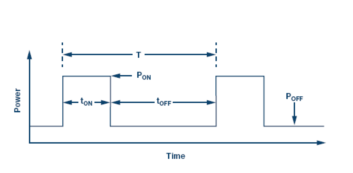
图3.基本周期供电图
方程5提供了一个利用图3所示运行特性来估算平均功耗(PAV)的简单关系式。
PON是智能传感器节点执行采样并处理数据以产生和传输相关测量结果的平均功耗。
POFF是智能传感器节点支持低功耗睡眠模式所需的平均功耗。
tON是智能传感器开启、产生测量结果、将该结果传输到物联网云、然后关闭所需的时间。
tOFF是智能传感器处于静止状态(睡眠模式或完全关断)的时间。
T为平均测量周期时间。
测量过程
在其开启时间(tON)内,智能传感器通常会经历多个不同运行状态。图4和方程6显示了一个示例序列,其将开启时间分为四段:初始化、建立、处理和通信。
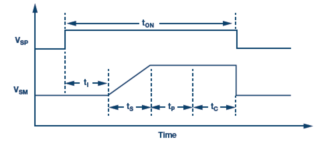
图4.智能传感器测量周期序列
tI是初始化时间,代表从施加电源(VSP)到信号链中的各器件准备好支持数据采样和处理的时间。
tS是建立时间,代表从第一个数据样本到滤波器输出(VSM)建立于足够高的精度水平的时间。
tP是处理时间,代表从滤波器建立到产生测量结果所需的时间。这可能包括应用校准公式、专门的信号处理以及根据物联网安全协议进行数据加密的时间。
tC是通信时间,代表连接云服务、发送加密数据以及支持差错校验或身份验证服务所需的时间。
建立时间影响
根据测量周期的阶段划分(图4),很明显,在滤波器建立时间这一段中,噪声可能会影响周期供电的智能传感器节点的功耗。一般而言,来自均值操作的噪声幅度的降低量与均值时间的平方根成比例,而能耗的增加量与均值时间是直接比例关系。因此,噪声幅度降低10倍会引起能耗(滤波建立期间)增加100倍!这种不成比例的权衡关系很快会对只需最少滤波(最低噪声)的传感器有利。
应用示例
考虑图5所示的微波天线平台,其停靠在一个塔式平台上。在此类通信系统中,数据链路的可靠性取决于指向角的精度。为了维持指向角,可能需要手动调整,特别是地震或其他原因扰动了天线所停靠的平台之后。此类远程维护的成本高昂,而且不能及时响应,因此,作为维护响应策略的一部分,一家天线运营商正研究利用MEMS加速度计监控天线方向变化的可行性。
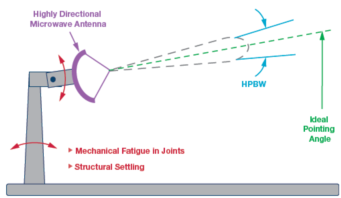
图5.微波天线平台
系统架构师根据最基本的功能要求开始了此次调研:维持各天线平台的可靠通信。该系统中,可靠的数据通信要求天线指向角始终位于天线的半功率波束宽度(HPBW,参见图5)以内。因此,他们决定:如果天线在短时间内的方向变化达到天线HPBW的25%,那么就触发一次实地维护需求。
在支持此目标的误差预算内,架构师允许倾斜测量的峰值噪声为测量目标(HPBW的25%)的10%。为简明起见,架构师还指定噪声峰值等于噪声均方根(rms)值的3倍。方程7反映了所有这些限定条件,并将其简化为一个关系式,即倾斜测量中的噪声必须小于HPBW/120。
方程8是该角度噪声要求与MEMS加速度计的相同性能指标的关系式,它是通过如下方式得来:将方程7的结果代入方程2中的加速度和倾斜角基本公式。
因此,若天线的HPBW为0.7°,则加速度计的噪声必须小于100 μg才能达到现有标准。
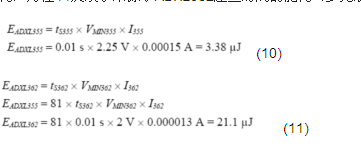
为使测量实现100 μg的不确定度,可以利用这一结果作为指标来确定各候选传感器(表1)所需的均值时间量。回顾图2可知,ADXL355将需要约0.01秒(tS355 = 0.01,参见方程10)的均值时间才能达到要求。
对于ADXL362,可以做简单的近似计算:因为其噪声是ADXL355的9倍,所以为了达到相同的目标,需要的均值时间将是ADXL355的81倍(tS362 = 81 x tS355,参见方程11)。方程10反映了来源于ADXL355建立时间的能耗,方程11反映了来源于ADXL362建立时间的能耗(参见表1)。
出乎意料的是,对于该噪声性能水平,最低能耗来自最低噪声的加速度计,而不是来自最低功耗的加速度计。方程12将方程10和方程11中各传感器的能耗估计值除以测量间隔(T = 10秒),得到建立时间对功耗的估计贡献。
结论
本文揭示了一种特殊情况,即最低功耗解决方案是由噪声最低的核心传感器实现的,而不是由功耗最低的传感器实现的。新兴物联网应用对性能要求严苛,而可用能源则很有限;对于那些为此类应用开发智能传感器方案的人士来说,这种解决途径可能是一个重要的启示。事实上,愿意了解并挑战哪怕是最根本的范式的人士,可能会获得更巧妙的解决方案。有时候,同一传感器既能提供最高性能,又具有最低功耗。
作者简介
Mark Looney [mark.looney@analog.com]ADI公司(美国北卡罗来纳州格林斯博罗)的iSensor®应用工程师。自1998年加入ADI公司以来,他在传感器信号处理、高速模数转换器和DC-DC电源转换领域积累了丰富的工作经验。他拥有内华达州大学雷诺分校电气工程专业学士(1994年)和硕士(1995年)学位,并发表过数篇文章。加入ADI公司之前,他曾协助创立汽车电子和交通解决方案公司IMATS,还担任过Interpoint公司的设计工程师。
-
《物联网与传感器技术》2012-08-17 3145
-
物联网应用中对传感器及MCU的要求2017-04-27 3182
-
用于物联网的超低功耗传感器节点包括BOM及原理图2018-09-13 3039
-
物联网智能传感器的噪声与功耗2018-10-19 3009
-
物联网时代的传感器有哪些特征2018-10-31 2795
-
基于智能传感器的物联网应用开发2019-07-22 3303
-
安森美半导体物联网图像传感器应用2019-07-25 3039
-
什么是物联网的心脏?传感器是关键2020-05-15 2408
-
物联网无线传感器节点如何设计2020-05-19 2546
-
物联网传感技术有哪些2020-06-22 3069
-
物联网中的传感器2020-08-12 2105
-
物联网无线传感器的节点设计2020-08-14 2069
-
物联网中的十大传感器类型2021-01-27 3008
-
物联网最低功耗解决方案是由什么传感器实现的?2021-03-11 3850
-
物联网智能传感器噪声与功耗介绍2023-11-24 800
全部0条评论

快来发表一下你的评论吧 !
