

永磁直流伺服电机浅析,永磁伺服电机的热阻与时间常数测试
伺服与控制
描述
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。目前,在数控机床进给驱动中采用的直流电动机主要是大惯量宽调速永磁式直流伺服电动机,本节将主要对这种电动机进行分析介绍。
永磁直流伺服电机分析
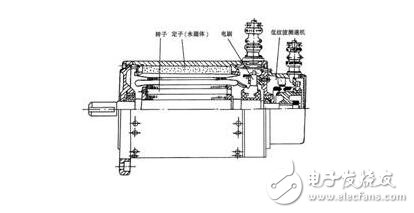
1.永磁直流伺服电动机基本结构与特点
这种电机的基本结构如图所示,其同普通直流电动机的结构类似,也是由定子、转子、电刷和换向器等组成。该种电动机的定子磁极是个采用铝镍钴合金、钕铁硼、或稀土钴等材料所做成的永久磁体,矫顽力很高,能够产生极大的峰值转矩以满足高的加、减速要求;且即使在较高的磁通密度下保持性能稳定(即不出现退磁)。转子的铁心上斜槽数目较多,且在一个槽内分布有几个虚槽以减少转矩波动。电刷的材料也经过仔细筛选,使得其可以在较大的加速度状态下也有良好的换向性能。低波纹测速机等其它检测元件如旋转变压器、脉冲编码器可以装在电动机轴上,从而可得到精密的速度和位置检测信号,以反馈到速度控制单元和位置控制单元。该种电动机既具有一般直流电动机便于调速、机械性能较好的优点,又具有小惯量直流电机快速响应性能的优势。
2.永磁直流伺服电动机工作原理
直流电动机工作原理的示意图如图所示。
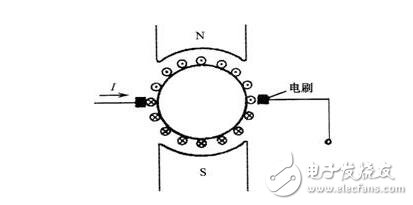
在转子绕组中的任何一根导体,只要一转过中性线,从定子S极下的范围进入了定子N极下的范围,由于电刷和换向器的作用,那么这根导体上的电流一定要反向;反之则由定子N极下的范围进入定子S极下的范围时,导体上的电流也要发生反向。因此转子的总磁势正交,在转子磁场与定子磁场相互作用下产生了电动机的电磁转矩,从而使电动机转动。
机械特性是电机的静态特性,是稳定运行时带动负载的性能,此时,电磁转矩与外负载相等。当电机带动负载时,电机转速与理想转速产生转速差Δn,它反映了电机机械特性的硬度,Δn越小,表明机械特性越硬,性能越好。
永磁伺服电机的热阻与时间常数测试
热阻是反应阻止热量传递的综合参数,电机热阻是指从电机内的热源(绕组、铁心等)到冷却介质之间对热流的阻抗。热时间常数又叫热响应时间,电机的热时间常数是指在恒定功耗的技术规定条件下,电机绕组温升达到稳定值的63.2%所需时间。
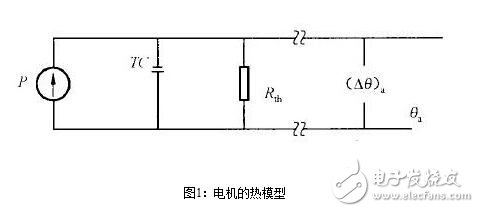
电机的热模型包含了几种热时间常数,为了便于分析我们通常选用一种模型(图1:电机热模型)对热时间常数及热阻完成测试,下面本文对永磁伺服电机的热阻测试和热时间常数测试进行详细介绍。
1、永磁伺服电机热阻、热时间常数试验条件
测试试验时为方便电机自身均匀散热,被试电机可以在低速(低于5r/min)下运行,散热板与其他接触部分作隔热处理。试验在恒温条件下进行。若是风机电机,试验应在风机电机的规定的冷却条件下进行。
说明:
P——功率损耗,单位为瓦特(W);
TC——热容,单位为焦每开(J/K);
Rth——热阻,单位为开每瓦(K/W)
(△θ)a——在环境温度下的温升,单位为开(K);
θa——环境温度,单位为摄氏度(℃)。
2、永磁伺服电机热阻、热时间常数试验程序
永磁伺服电机热阻、热时间常数试验时依据以下步骤进行:
(a) 用不大于最大连续电流值的电流驱动电机并使电机达到热平衡状态;
(b) 确定温升(△θ)a;
(c) 用(△θ)a乘以0.368,结果加上环境温度θa;
(d) 将电源断开,记录电机的温度下降到c)步骤计算出的温度值所需的时间t;
(e) 用P=I^2R计算功率损耗,式中I为电流值,R为温度在θf时的绕组电阻。
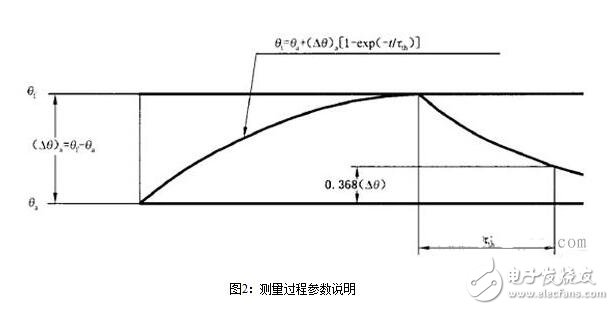
(f) 热时间常数τth=TC*Rth,是在d)步骤中记录的时间t,则热阻Rth=(△θ)a/P,试验过程中相关参数的确定可参见图示2。
说明:
τth=——热时间常数,单位为分(min);
θf——热稳定时的温度,单位为摄氏度(℃);
θa——环境温度,单位为摄氏度(℃);
θt——在t时刻的温度,单位为摄氏度(℃)。
-
 金鉴实验室周工
2019-05-30
0 回复 举报金鉴试验室专业承接T3ster热阻测试,联系电话:18002200969,周工! 收起回复
金鉴实验室周工
2019-05-30
0 回复 举报金鉴试验室专业承接T3ster热阻测试,联系电话:18002200969,周工! 收起回复
-
永磁同步电机与伺服电机的对比2024-11-22 5587
-
宽调速永磁直流伺服电机原理 永磁式直流伺服电机常用的调速装置是什么2024-06-05 2049
-
无刷直流电机与永磁同步伺服电机的区别在什么地方?2021-07-20 3788
-
交流永磁同步伺服电机的工作原理2021-07-12 1695
-
异步伺服电机和同步伺服电机的区别2018-11-12 6034
-
一般的伺服电机多少钱_松下伺服电机价格2018-04-02 57154
-
交流永磁伺服电机的工作原理及分类2017-10-17 3250
-
交流永磁同步伺服电机及其驱动技术(精)2017-01-21 1080
-
永磁伺服电机转子偏心对电机性能的影响研究_孔汉2017-01-08 980
-
基于DSP的永磁同步电机交流伺服控制系统2016-04-18 797
-
基于IPM的永磁同步电机伺服驱动控制的研究2016-04-13 903
全部0条评论

快来发表一下你的评论吧 !
