

步进驱动器_步进驱动器原理_步进电机驱动器选型
电子常识
描述
步进驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。广泛应用于雕刻机、水晶研磨机、中型数控机床、脑电绣花机、包装机械、喷泉、点胶机、切料送料系统等分辨率较高的大、中型数控设备上。
它是一种能使步进电机运转的功率放大器,能把控制器发来的脉冲信号转化为步进电机的角位移,电机的转速与脉冲频率成正比,所以控制脉冲频率可以精确调速,控制脉冲数就可以精确定位。
步进驱动器原理
1.恒流驱动
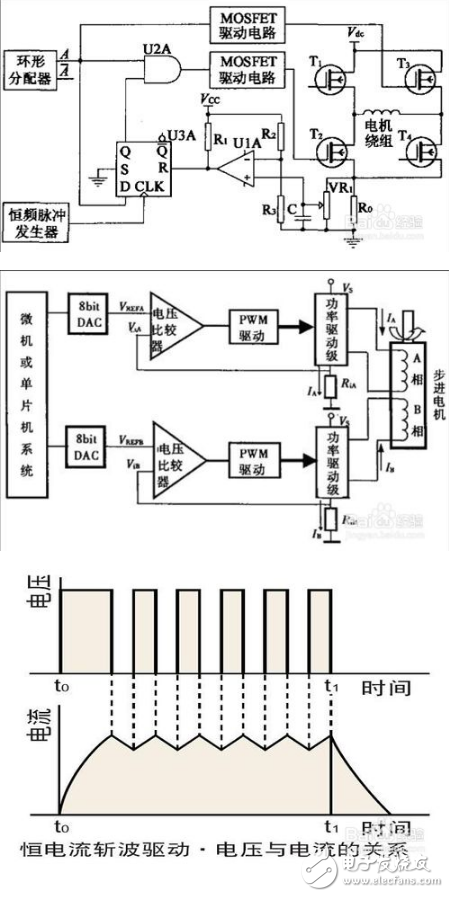
恒流控制的基本思想是通过控制主电路中MOSFET的导通时间,即调节MOSFET触发信号的脉冲宽度,来达到控制输出驱动电压进而控制电机绕组电流的目的。
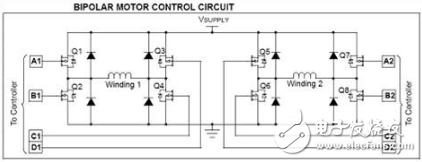
2.单极性驱动
单极性 (unipolar) 和双极性 (bipolar) 是步进电机最常采用的两种驱动架构。单极性驱动电路使用四颗晶体管来驱动步进电机的两组相位,电机结构则如图1所示包含两组带有中间抽头的线圈,整个电机共有六条线与外界连接。这类电机有时又称为四相电机,但这种称呼容易令人混淆又不正确,因为它其实只有两个相位,精确的说法应是双相位六线式步进电机。六线式步进电机虽又称为单极性步进电机,实际上却能同时使用单极性或双极性驱动电路。
3.双极性驱动
双极性步进电机的驱动电路则如图2所示,它会使用八颗晶体管来驱动两组相位。双极性驱动电路可以同时驱动四线式或六线式步进电机,虽然四线式电机只能使用双极性驱动电路,它却能大幅降低量产型应用的成本。双极性步进电机驱动电路的晶体管数目是单极性驱动电路的两倍,其中四颗下端晶体管通常是由微控制器直接驱动,上端晶体管则需要成本较高的上端驱动电路。双极性驱动电路的晶体管只需承受电机电压,所以它不像单极性驱动电路一样需要箝位电路。
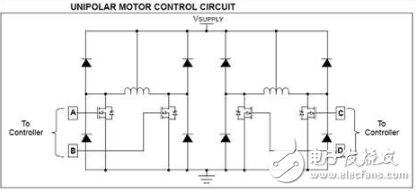
4.微步驱动
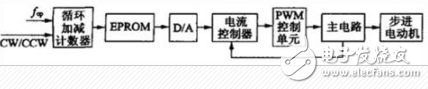
微步驱动技术是一种电流波形控制技术。其基本思想是控制每相绕组电流的波形,使其阶梯上升或下降,即在0和最大值之间给出多个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中间状态,对应于电机转子旋转的步数增多、步距角减小。采用细分驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避免低频共振及降低运行噪声 。
步进电机驱动器选型
由于步进电机及驱动器型号较多、种类较多,用户在选择时应有一定的讲究,这样才能以最优的性能、最低的价格选择好自己所需的产品。
1、 首先确定步进电机拖动负载所需要的扭矩。
最简单的方法是在负载轴上加一杠杆,用弹簧秤拉动杠杆,拉力乘以力臂长度既是负载力矩。或者根据负载特性从理论上计算出来。
由于步进电机是控制类电机,所以目前常用步进电机的最大力矩不超过45Nm,力矩越大,成本越高,如果您所选择的电机力矩较大或超过此范围,可以考虑加配减速装置。
2、 确定步进电机的最高运行转速。
转速指标在步进电机的选取时至关重要,步进电机的特性是随着电机转速的升高,扭矩下降,其下降的快慢和很多参数有关,如:驱动器的驱动电压、电机的相电流、电机的相电感、电机大小等等,一般的规律是:驱动电压越高,力矩下降越慢;电机的相电流越大,力矩下降越慢。www.diangon.com在设计方案时,应使电机的转速控制在600转/分或800转/分以内,当然这样说很不规范,可以参考〈矩-频特性〉。
3、根据负载最大力矩和最高转速这两个重要指标,再参考〈矩-频特性〉,就可以选择出适合自己的步进电机。如果您认为自己选出的电机太大,可以考虑加配减速装置,这样可以节约成本,也可以使您的设计更灵活。要选择好合适的减速比,要综合考虑力矩和速度的关系,选择出最佳方案。
4、最后还要考虑留有一定的(如50%)力矩余量和转速余量。
5、可以先选择混合式步进电机,如果由于价格因素,可以选取反应式步进电机。
6、尽量选取细分驱动器,且使驱动器工作在细分状态。
7、选取时且勿走入只看电机力矩这一个指标的误区,也就是说并非电机的扭矩越大越好,要和速度指标一起考虑。
8、超小型驱动器和微型驱动器是靠外壳作为散热器的,应固定在较大、较厚的金属板上或外加风机散热,如果没有散热条件,而驱动器又工作在转速较低的场合(这时驱动器发热较大),可以选用带风机的90型驱动器代替。
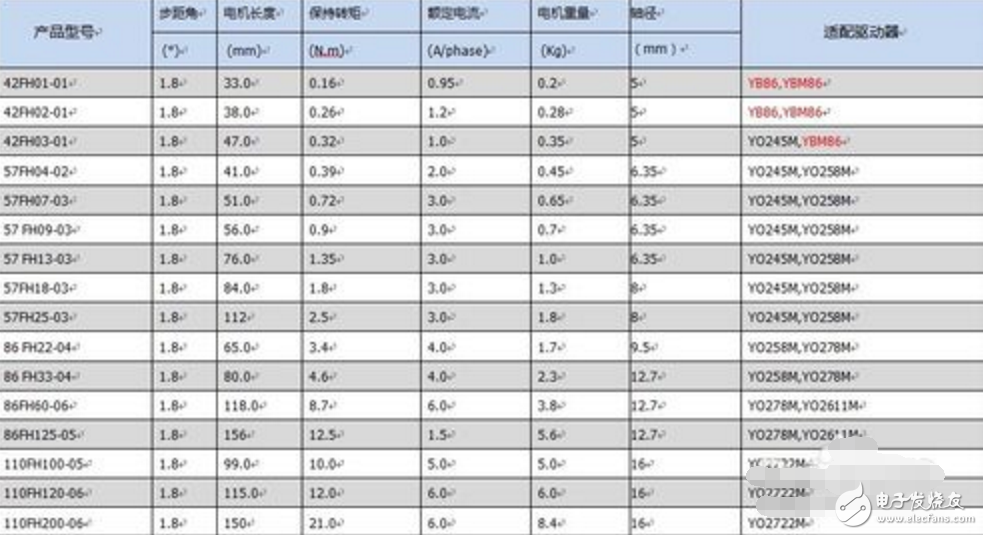
步进电机驱动器产品选型介绍如下:(仅供参考)
- 相关推荐
- 热点推荐
- 步进驱动器
-
步进电机驱动器有哪些分类,如何选型?2025-01-06 2500
-
步进驱动器的作用及种类2024-09-04 1892
-
步进电机驱动器细分怎么调2024-06-12 5858
-
如何正确选择步进电机驱动器2024-06-05 4543
-
步进电机驱动器拨码开关怎么调2024-01-15 7430
-
步进电机驱动器的主要驱动方式有哪些?2023-11-14 4840
-
步进电机驱动器的分类及模块2021-10-02 11255
-
步进电机驱动器调速方法_步进电机驱动器的作用2020-04-20 12956
-
步进电机和步进电机驱动器选型的九条准则2020-03-29 8188
-
步进电机驱动器工作模式_步进电机驱动器电路图2019-10-01 10515
-
七特步进电机驱动器型号2018-11-21 2523
-
步进驱动器说明书_步进电机驱动器怎么用_步进驱动器维修2017-08-15 41795
-
步进驱动器接线图_三相步进驱动器接线图_步进电机控制器接线图2017-08-11 79762
全部0条评论

快来发表一下你的评论吧 !
