

 陀螺仪LSM6DSV16X与AI集成(10)----获取磁力计数据
陀螺仪LSM6DSV16X与AI集成(10)----获取磁力计数据
描述
概述
本文将介绍如何使用 LIS2MDL 传感器来读取数据。主要步骤包括初始化传感器接口、验证设备ID、配置传感器的数据输出率和滤波器,以及通过轮询方式持续读取磁力数据和温度数据。读取到的数据会被转换为适当的单位并通过串行通信输出。
需要样片的可以加群申请:615061293 。

视频教学
[https://www.bilibili.com/video/BV118sJeHERR/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源码下载
[https://download.csdn.net/download/qq_24312945/89682988]
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为STM32H503CB,陀螺仪为LSM6DSOW,磁力计为LIS2MDL。

九轴融合
在六轴基础上添加磁力计执行九轴融合 ,MotionFX库实现了一种传感器融合算法,用于估计空间中的3D方向。它使用基于卡尔曼滤波器的数字滤波器理论来融合来自多个传感器的数据,并补偿单个传感器的局限性。例如:
● 陀螺仪数据可能会漂移,这会影响方向估计;使用磁力计可以提供绝对方向信息来解决这个问题。
● 磁力计带宽不高且易受磁干扰影响,但这些弱点可以通过陀螺仪补偿。
● 九轴传感器融合使用加速度计、陀螺仪和磁力计的数据,提供包括航向(即磁北方向)的绝对方向。
● 六轴传感器融合仅使用加速度计和陀螺仪数据,计算量较小,但不提供绝对方向信息。
● 六轴传感器融合适用于快速移动的场景(如游戏)和不需要绝对方向的情况。

通信模式
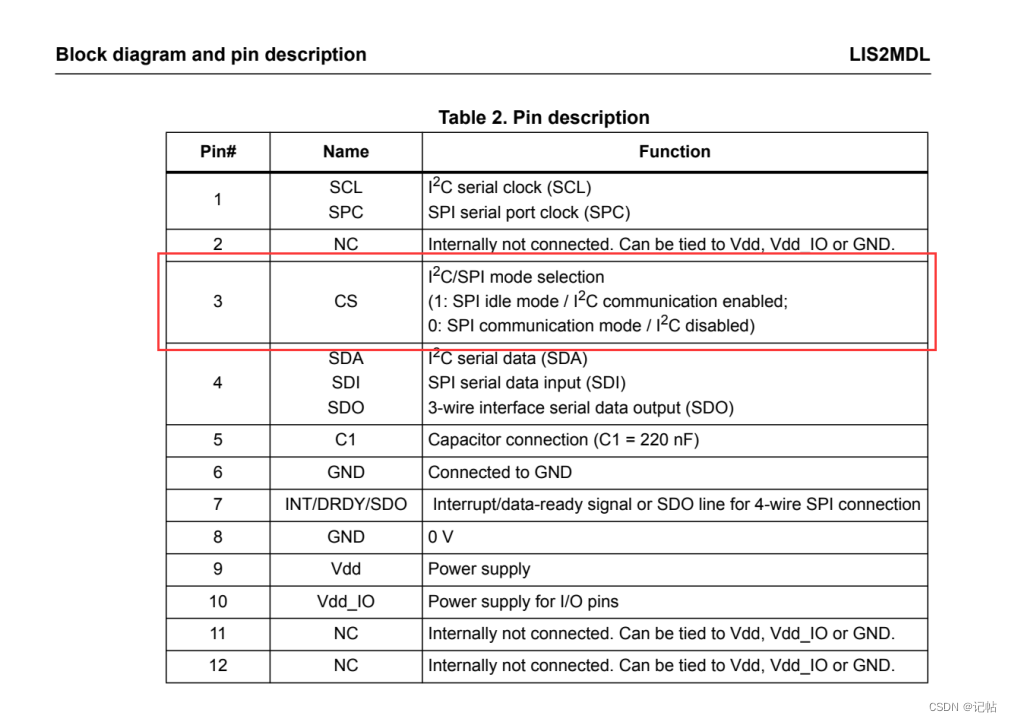
对于LIS2MDL,可以使用SPI或者IIC进行通讯。
最小系统图如下所示。
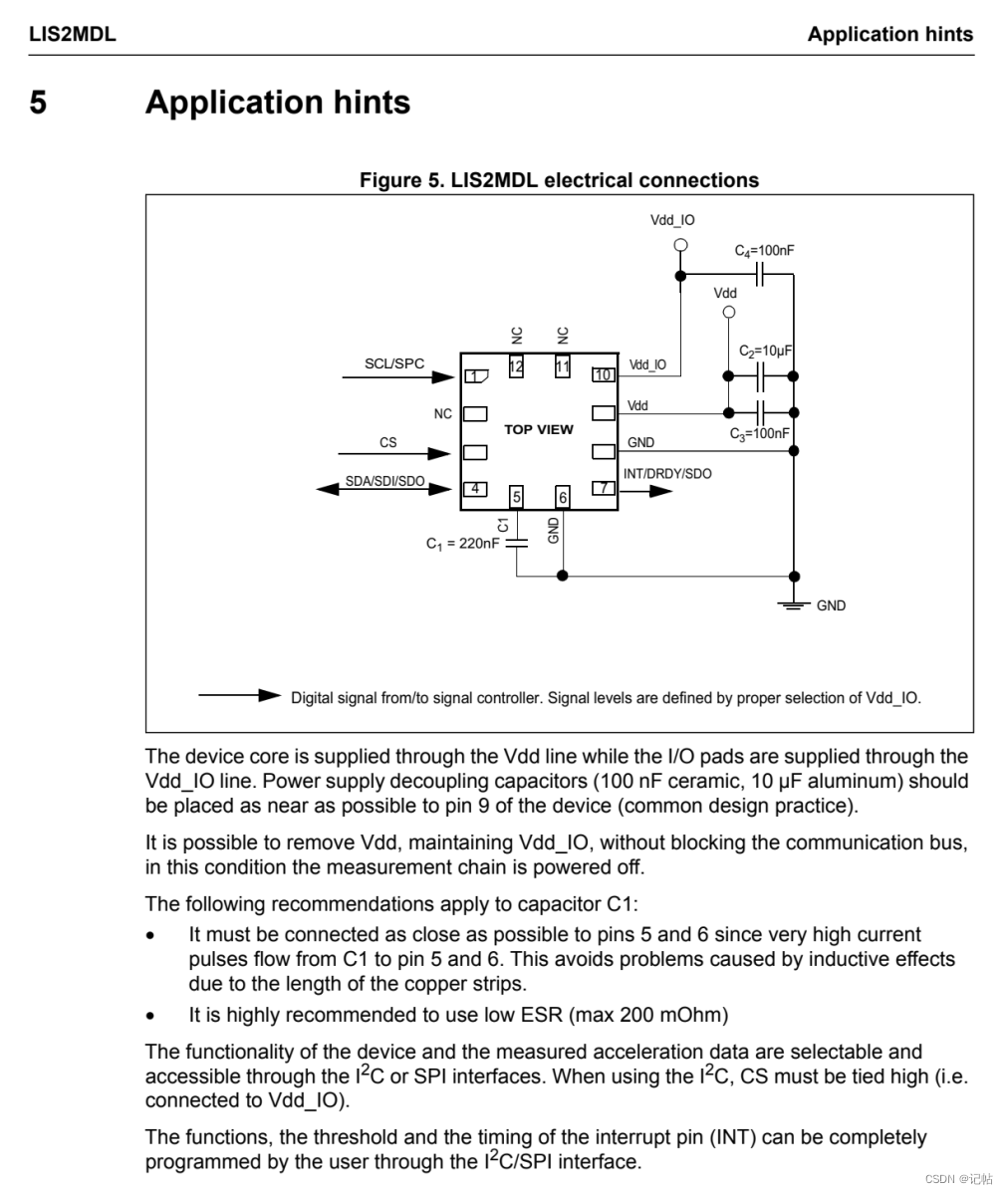
在CS管脚为1的时候,为IIC模式
本文使用的板子原理图如下所示。

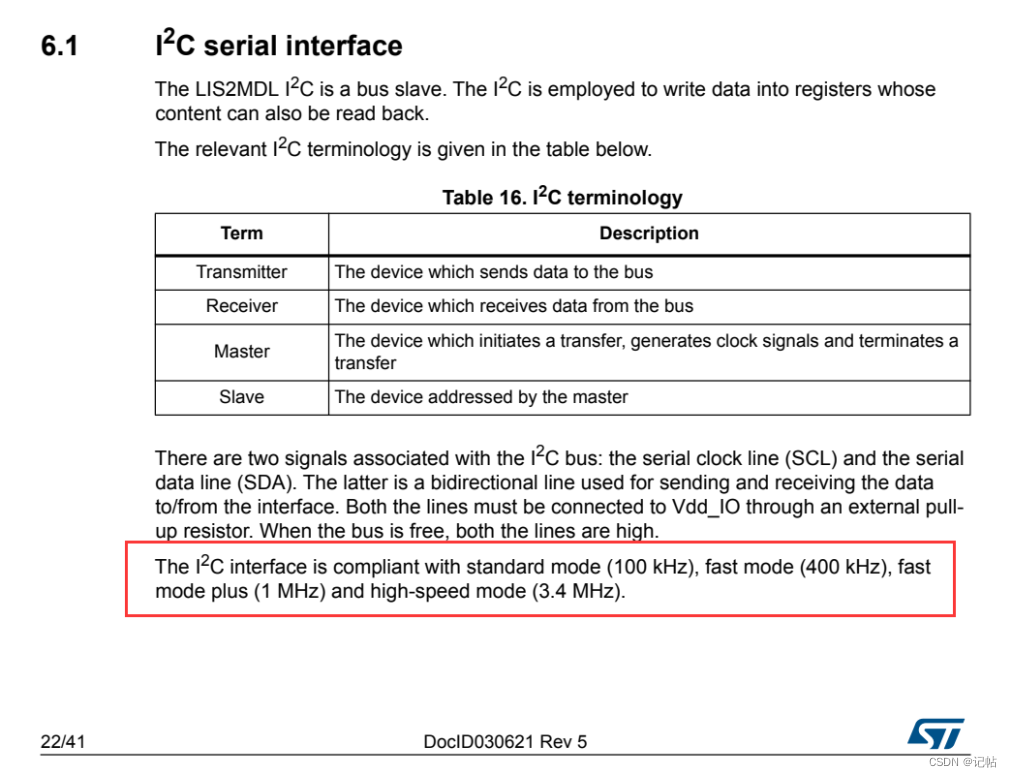
速率
该模块支持的速度为普通模式(100k)、快速模式(400k)、快速模式+(1M)、高速模式(3.4M)。
参考程序
[https://github.com/STMicroelectronics/lis2mdl-pid]
变量定义
int16_t data_raw_magnetic[3];
static float magnetic_mG[3];
/* Private functions ---------------------------------------------------------*/
/*
* WARNING:
* Functions declare in this section are defined at the end of this file
* and are strictly related to the hardware platform used.
*
*/
static int32_t lis2mdl_platform_write(void *handle, uint8_t reg, const uint8_t *bufp,
uint16_t len);
static int32_t lis2mdl_platform_read(void *handle, uint8_t reg, uint8_t *bufp,
uint16_t len);
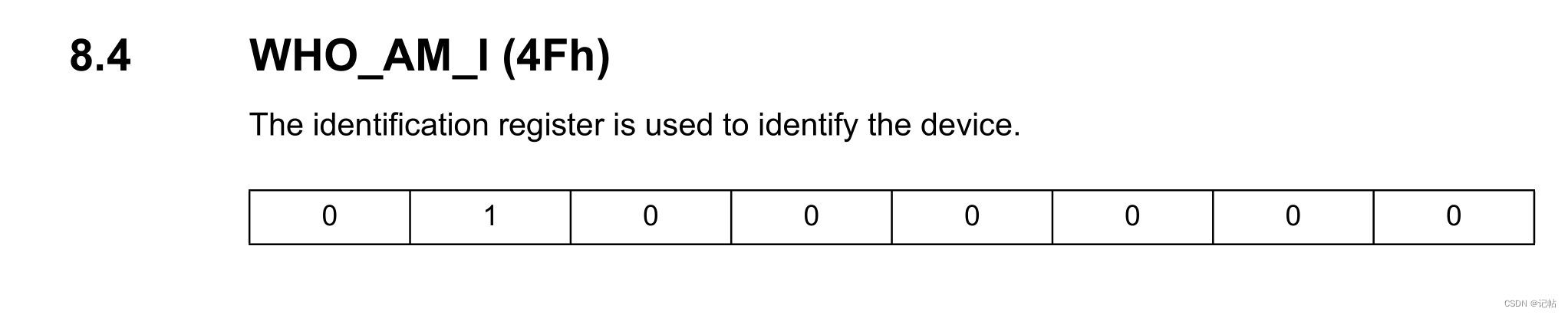
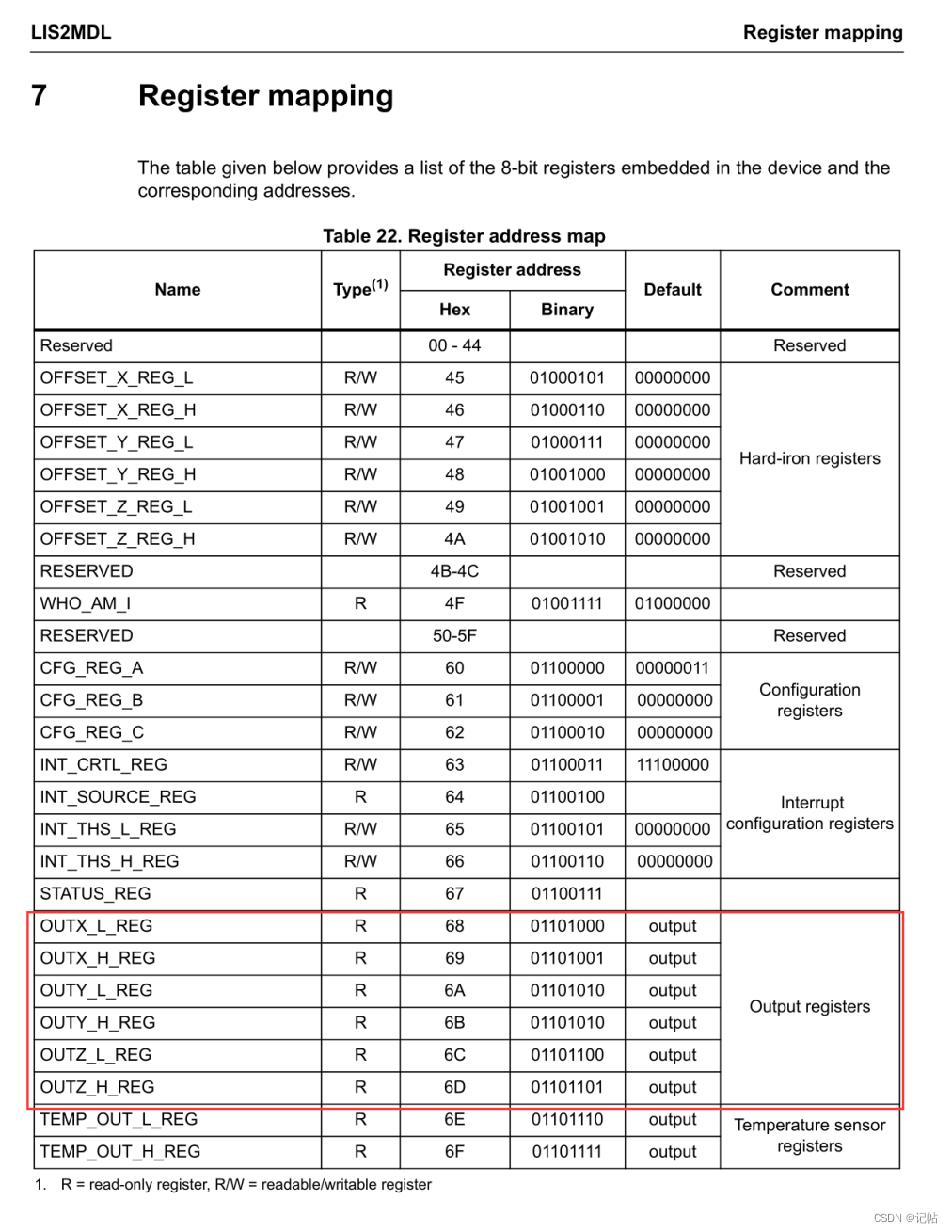
获取ID
可以向WHO_AM_I (4Fh)获取固定值,判断是否为0x40
 is2mdl_device_id_get为获取函数。
is2mdl_device_id_get为获取函数。
对应的获取ID驱动程序,如下所示。
/* Check device ID */
lis2mdl_device_id_get(&lis2mdl_dev_ctx, &whoamI);
printf("LIS2MDL_ID=0x%x,whoamI=0x%x",LIS2MDL_ID,whoamI);
if (whoamI != LIS2MDL_ID)
while (1) {
/* manage here device not found */
}
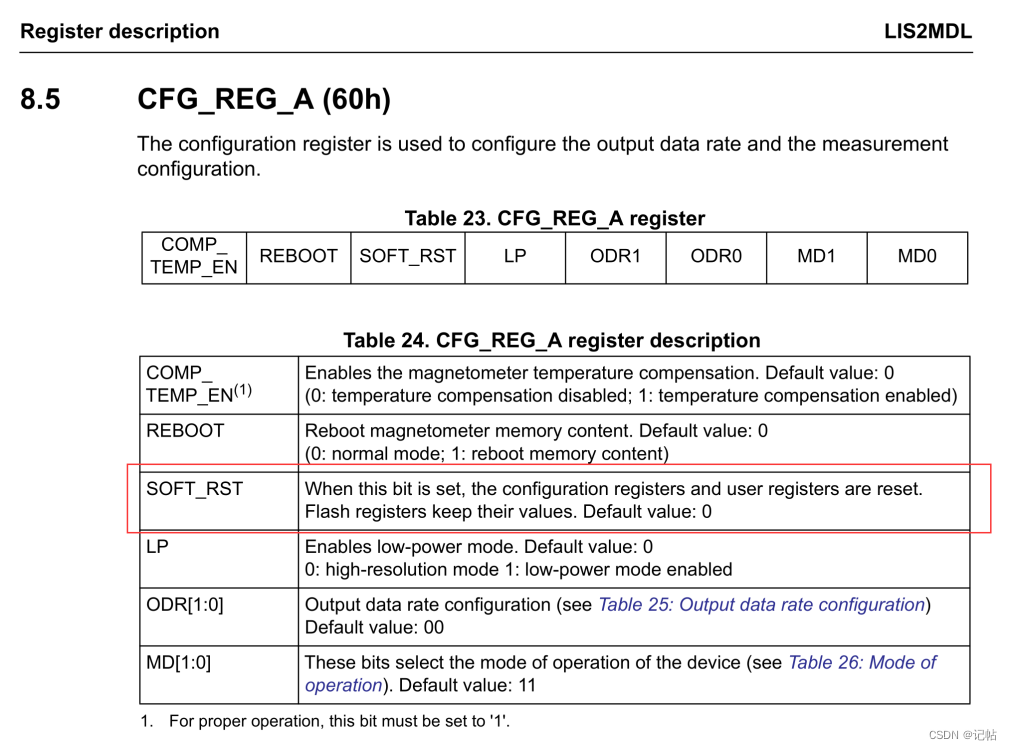
复位操作
可以向CFG_REG_A (60h)的SOFT_RST寄存器写入1进行复位。
lis2mdl_reset_set为重置函数。
对应的驱动程序,如下所示。
/* Restore default configuration */
lis2mdl_reset_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
do {
lis2mdl_reset_get(&lis2mdl_dev_ctx, &rst);
} while (rst);
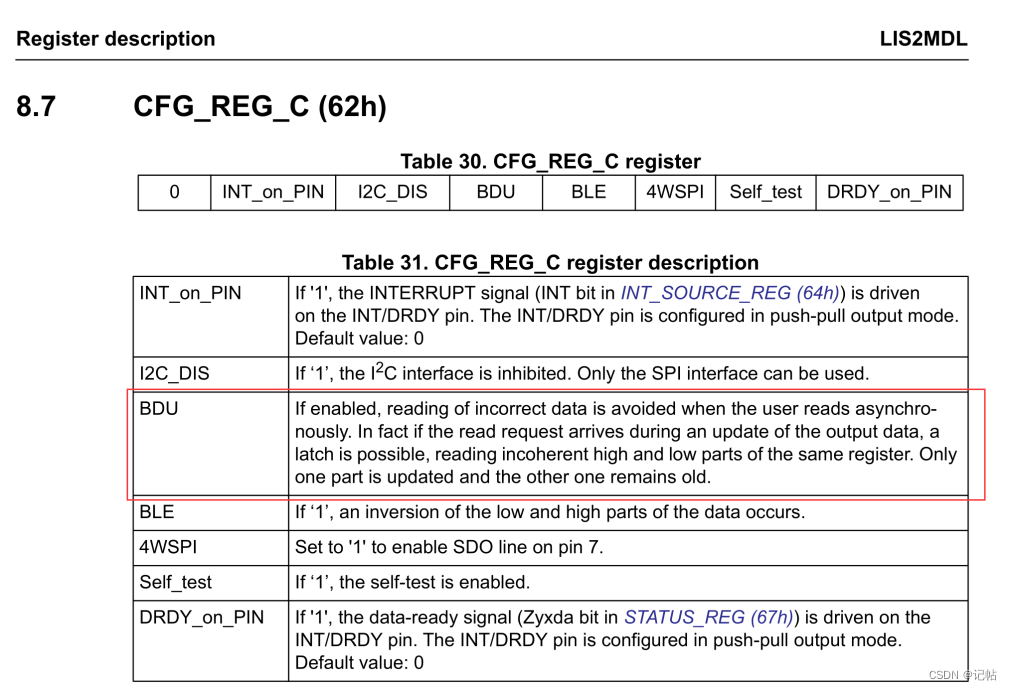
BDU设置
在很多传感器中,数据通常被存储在输出寄存器中,这些寄存器分为两部分:MSB和LSB。这两部分共同表示一个完整的数据值。例如,在一个加速度计中,MSB和LSB可能共同表示一个加速度的测量值。
连续更新模式(BDU = ‘0’):在默认模式下,输出寄存器的值会持续不断地被更新。这意味着在你读取MSB和LSB的时候,寄存器中的数据可能会因为新的测量数据而更新。这可能导致一个问题:当你读取MSB时,如果寄存器更新了,接下来读取的LSB可能就是新的测量值的一部分,而不是与MSB相对应的值。这样,你得到的就是一个“拼凑”的数据,它可能无法准确代表任何实际的测量时刻。
块数据更新(BDU)模式(BDU = ‘1’):当激活BDU功能时,输出寄存器中的内容不会在读取MSB和LSB之间更新。这就意味着一旦开始读取数据(无论是先读MSB还是LSB),寄存器中的那一组数据就被“锁定”,直到两部分都被读取完毕。这样可以确保你读取的MSB和LSB是同一测量时刻的数据,避免了读取到代表不同采样时刻的数据。
简而言之,BDU位的作用是确保在读取数据时,输出寄存器的内容保持稳定,从而避免读取到拼凑或错误的数据。这对于需要高精度和稳定性的应用尤为重要。
可以向CFG_REG_C (62h)的BDU寄存器写入1进行开启。
对应的驱动程序,如下所示。
/* Enable Block Data Update */
lis2mdl_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
设置速率
速率可以通过CFG_REG_A (60h)的ODR设置速率。
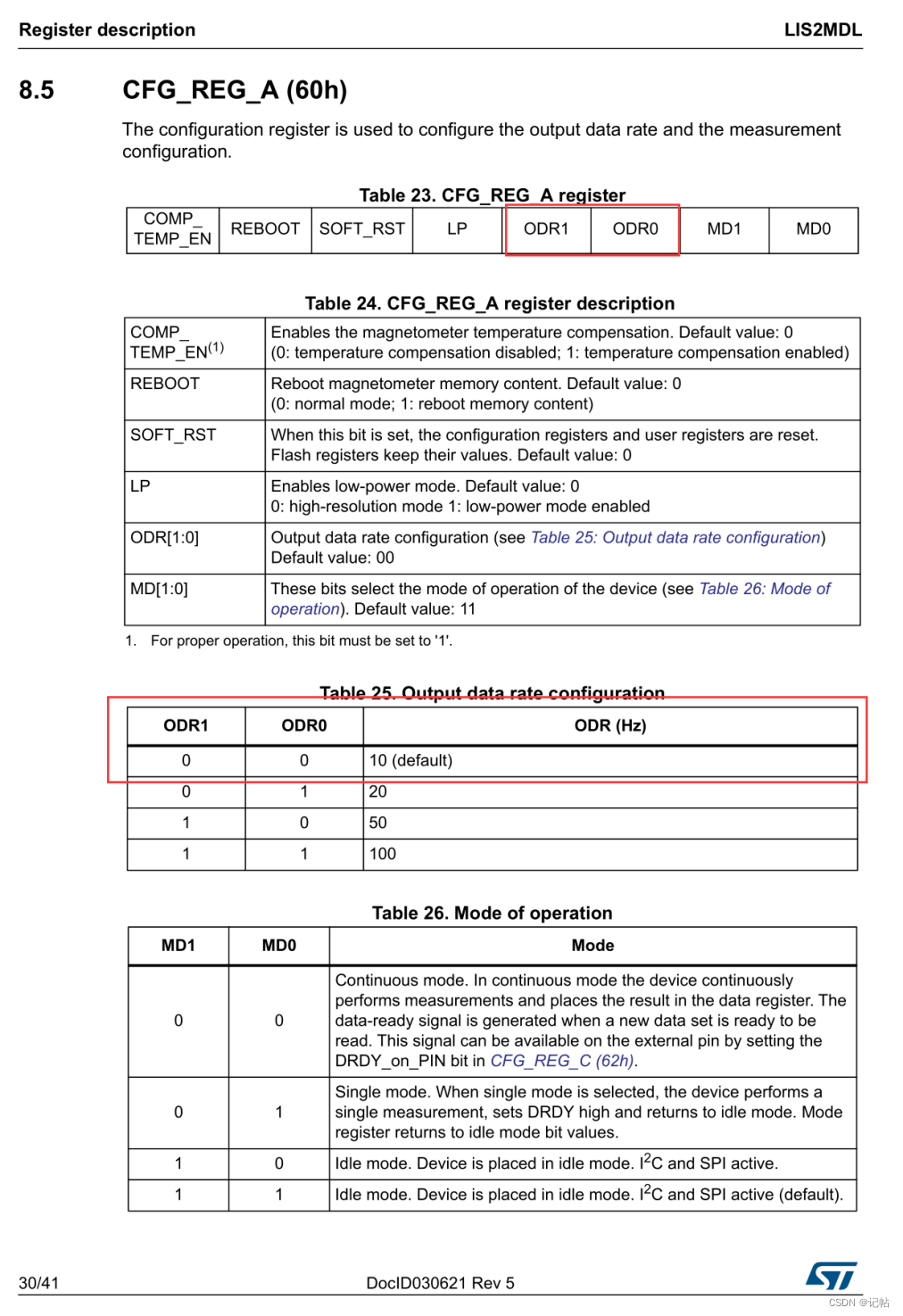
设置速率可以使用如下函数。
/* Set Output Data Rate */
lis2mdl_data_rate_set(&lis2mdl_dev_ctx, LIS2MDL_ODR_50Hz);
启用偏移消除
LIS2MDL 磁力计的配置寄存器(CFG_REG_B)的OFF_CANC - 这个位用于启用或禁用偏移消除。
这意味着每次磁力计准备输出新的测量数据时,它都会自动进行偏移校准,以确保数据的准确性。这通常用于校准传感器,以消除由于传感器偏移或环境因素引起的任何误差。
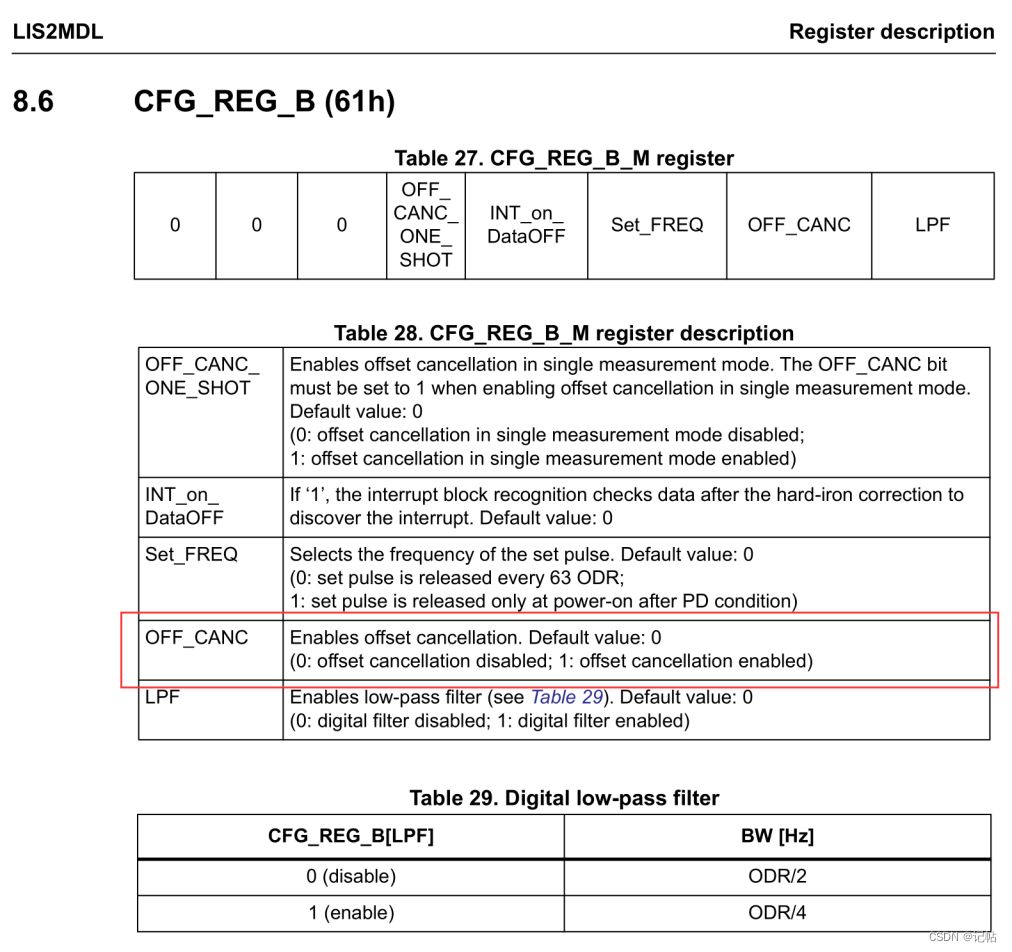
/* Set / Reset sensor mode */
lis2mdl_set_rst_mode_set(&dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR);
开启温度补偿
开启温度补偿可以通过CFG_REG_A (60h)的COMP_TEMP_EN进行配置。
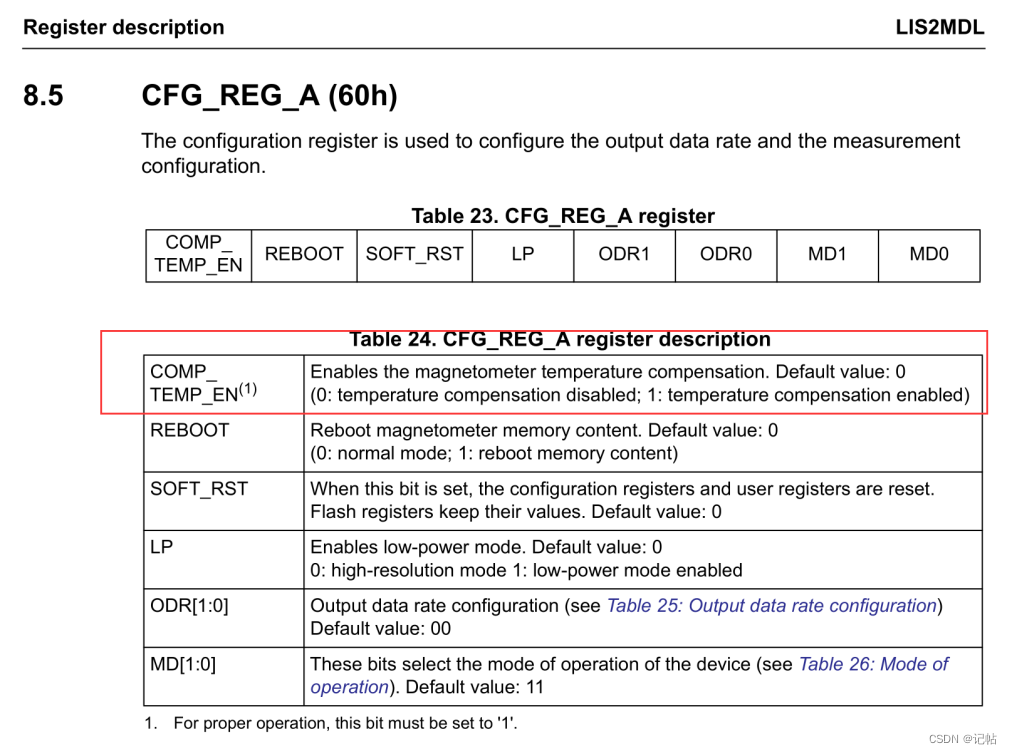
/* Enable temperature compensation */
lis2mdl_offset_temp_comp_set(&dev_ctx, PROPERTY_ENABLE);
设置为连续模式
LIS2MDL 磁力计 CFG_REG_A (60h) 配置寄存器的MD1 和 MD0 - 这两个位用于选择设备的工作模式。
00 - 连续模式,设备连续进行测量并将结果放在数据寄存器中。
01 - 单次模式,设备进行单次测量,然后返回到空闲模式。
10 和 11 - 空闲模式,设备被置于空闲模式,但I2C和SPI接口仍然激活
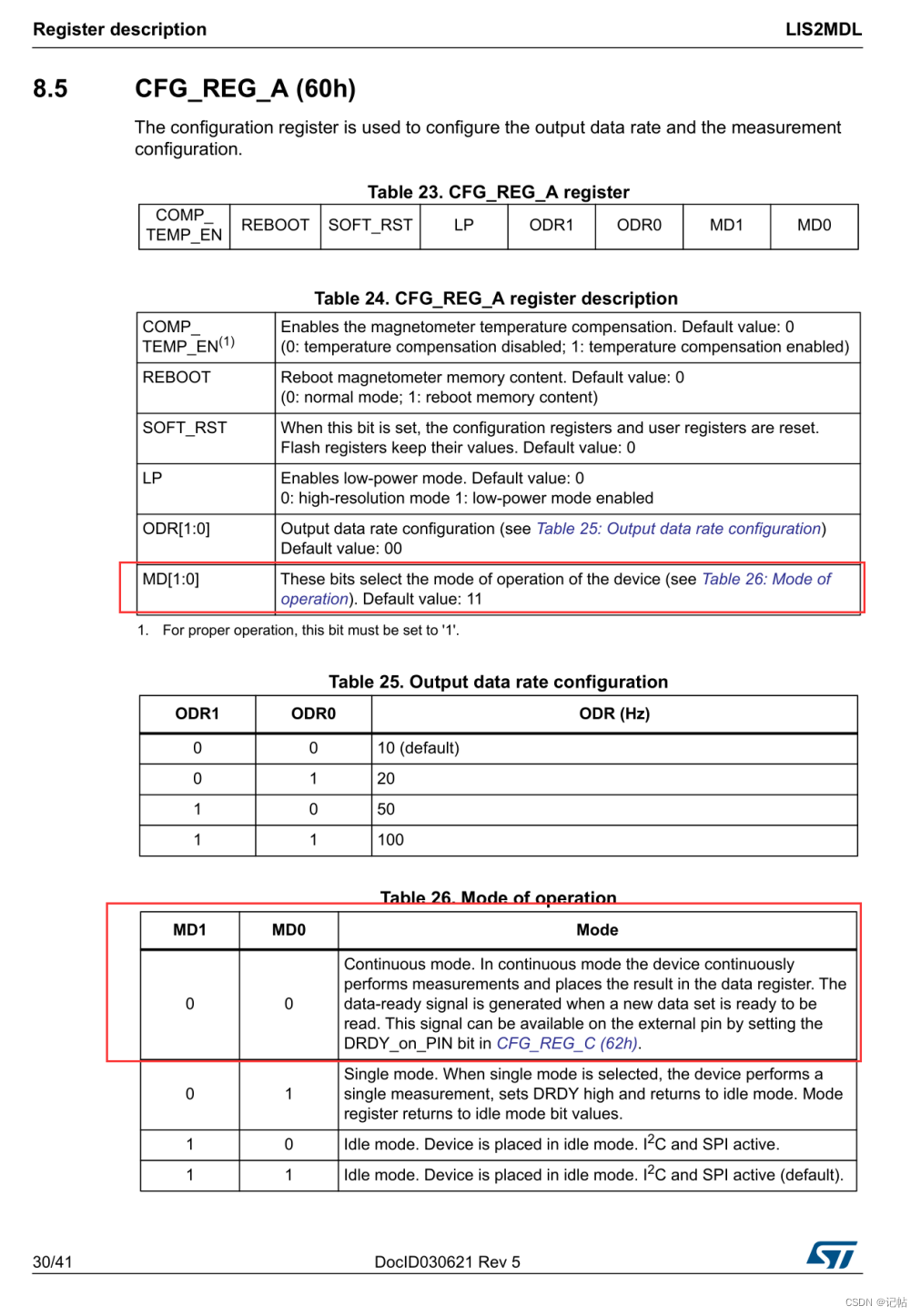
/* Set device in continuous mode */
lis2mdl_operating_mode_set(&dev_ctx, LIS2MDL_CONTINUOUS_MODE);
初始化
/* Initialize mems driver interface */
stmdev_ctx_t lis2mdl_dev_ctx;
lis2mdl_dev_ctx.write_reg = lis2mdl_platform_write;
lis2mdl_dev_ctx.read_reg = lis2mdl_platform_read;
lis2mdl_dev_ctx.mdelay = platform_delay;
lis2mdl_dev_ctx.handle = &SENSOR_BUS;
/* Initialize platform specific hardware */
// platform_init();
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lis2mdl_device_id_get(&lis2mdl_dev_ctx, &whoamI);
printf("LIS2MDL_ID=0x%x,whoamI=0x%x",LIS2MDL_ID,whoamI);
if (whoamI != LIS2MDL_ID)
while (1) {
/* manage here device not found */
}
/* Restore default configuration */
lis2mdl_reset_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
do {
lis2mdl_reset_get(&lis2mdl_dev_ctx, &rst);
} while (rst);
/* Enable Block Data Update */
lis2mdl_block_data_update_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
/* Set Output Data Rate */
lis2mdl_data_rate_set(&lis2mdl_dev_ctx, LIS2MDL_ODR_50Hz);
/* Set / Reset sensor mode */
lis2mdl_set_rst_mode_set(&lis2mdl_dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR);
/* Enable temperature compensation */
lis2mdl_offset_temp_comp_set(&lis2mdl_dev_ctx, PROPERTY_ENABLE);
/* Set device in continuous mode */
lis2mdl_operating_mode_set(&lis2mdl_dev_ctx, LIS2MDL_CONTINUOUS_MODE);
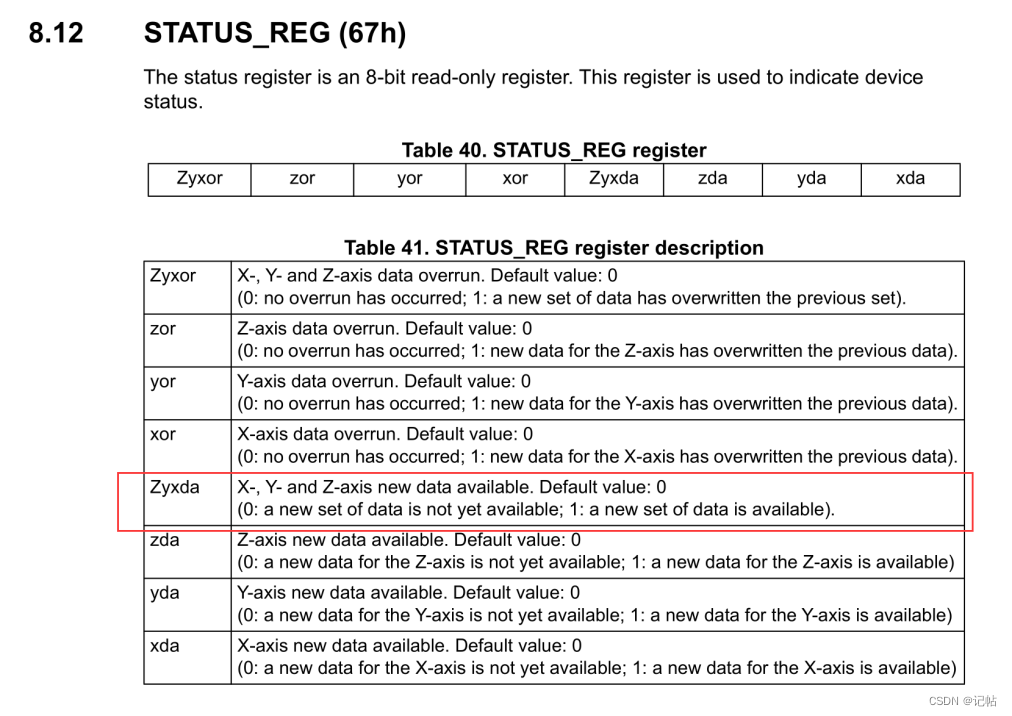
轮询读取数据
对于数据是否准备好,可以查看STATUS_REG (67h)的Zyxda位,判断是否有新数据到达。
uint8_t reg;
/* Read output only if new value is available */
lis2mdl_mag_data_ready_get(&dev_ctx, ®);
数据OUTX_L_REG(68h)-OUTZ_H_REG(6Dh)获取。
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&lis2mdl_dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
if(i==0)
printf("Magnetic field [mG]:%4.2ft%4.2ft%4.2frn",
magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]);
添加到如下所示地方。

演示

审核编辑 黄宇
-
陀螺仪LSM6DSV80X开发(4)----FIFO 读取陀螺仪数据2026-06-02 174
-
STM32H5开发陀螺仪LSM6DSV16X(4)----中断获取SFLP四元数2025-12-30 3174
-
STM32H5开发陀螺仪LSM6DSV16X(1)----轮询获取陀螺仪数据2025-12-22 6196
-
LSM6DSV16X:集成机器学习与静电感应的高性能惯性测量单元2025-10-28 1288
-
陀螺仪LSM6DSV16X与AI集成(13)----中断获取SFLP四元数2024-11-25 3899
-
LSM6DSV16X基于MLC智能笔动作识别(1)----轮询获取陀螺仪数据2024-10-16 2777
-
陀螺仪LSM6DSV16X与AI集成(11)----融合磁力计进行姿态解算2024-09-06 4673
-
陀螺仪LSM6DSV16X与AI集成(7)----FIFO数据读取与配置2024-07-18 3918
-
陀螺仪LSM6DSV16X与AI集成(1)----轮询获取陀螺仪数据2023-12-18 3695
-
ST LSM6DSV16X iNEMO惯性模块相关的使用信息和应用提示2023-08-31 785
全部0条评论

快来发表一下你的评论吧 !
