

lpc54102例程(两种方案代码详解)
电子制作
描述
lpc54102由于其性能和稳定性,在很多领域都有应用,下面我们来给大家分享一下lpc54102例程。
Nxp公司的LPC5410x系列产品是32位ARM Cortex-M4F/MO+MCU,集成了104KB SRAM,512KB闪存,3个12C,2个SPI,4个USART,32位计数器/定时器以及SCTimer/PWM和12位4.8MSPS ADC,具有低功耗,增强调试特性和高级支持区快等系统增强特性,适用于嵌入式应用。
LPC5410x为嵌入式应用的ARM cortexm4f基微控制器。这些设备包括一个可选的手臂Cortex-M0 +协处理器,104 KB的片上存储器,512 KB芯片上的flash,五个通用定时器,一个State-Configurable计时器(SCTimer / PWM)PWM功能,一个RTC /报警定时器,一个24位多速率计时器(捷运),窗口看门狗定时器(WWDT),四个USARTs两spi,三个Fast-modeplus i2c总线接口与高速奴隶模式,和一个12位4.8 Msamples / secADC。
LPC54102传感器处理/运动解决方案主要特性:
a. 完整的硬件和软件设计,准备定制
b. 32位LPC54102 Cortex-M4F / M0 +单片机
c. LPCXpresso54102发展局
d. 传感器罩板
e. LPCOpen软件驱动程序
f. LPC的传感器融合框架
g. 博世BSX Lite传感器融合库
h. 软件演示
i. 文档
LPC54102传感器处理/运动解决方案主要优势:
a. 向你的应用程序添加6 -或9轴运动传感器
b. 集成传感器融合中间件和便携式传感器融合框架
c. 传感器融合api允许用户轻松地创建使用运动传感器的应用程序
d. 额外的数字传感器(压力/温度,环境光,接近)
e. 软件开发工具,用于快速开始编写、编译和运行基于传感器的应用程序
f. 为最终产品设计师提供一套丰富的参考设计材料,包括文档、移植指南和示意图
g. 可堆叠硬件支持更多的传感器或添加插件模块
h. 用于测量和原型的大量的pinouts
i. 低功率
LPC54102开发板介绍
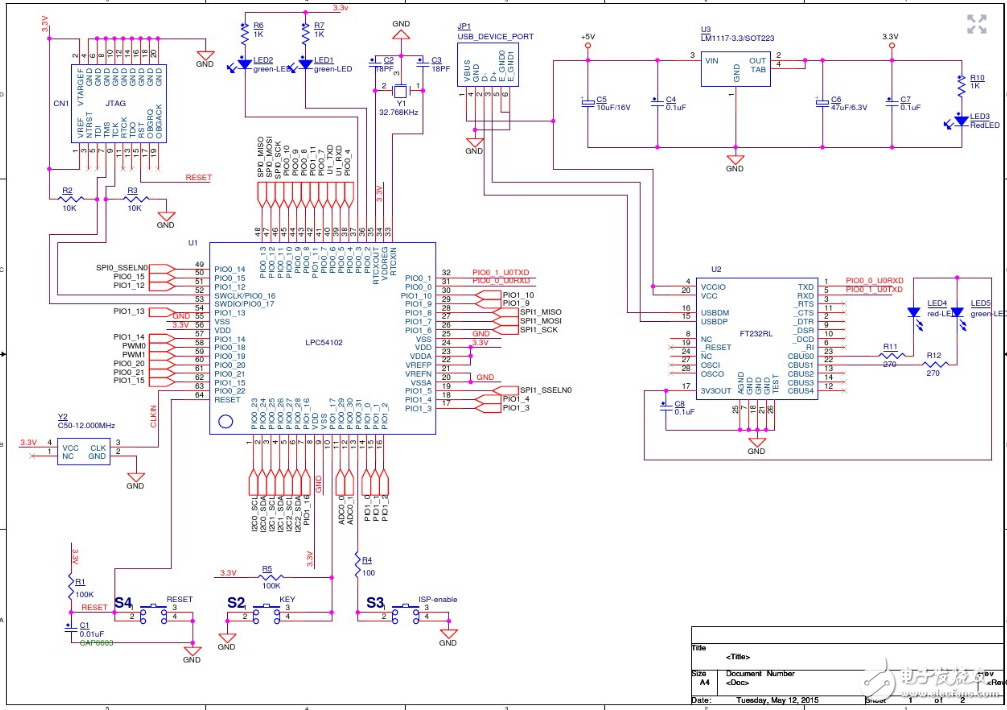
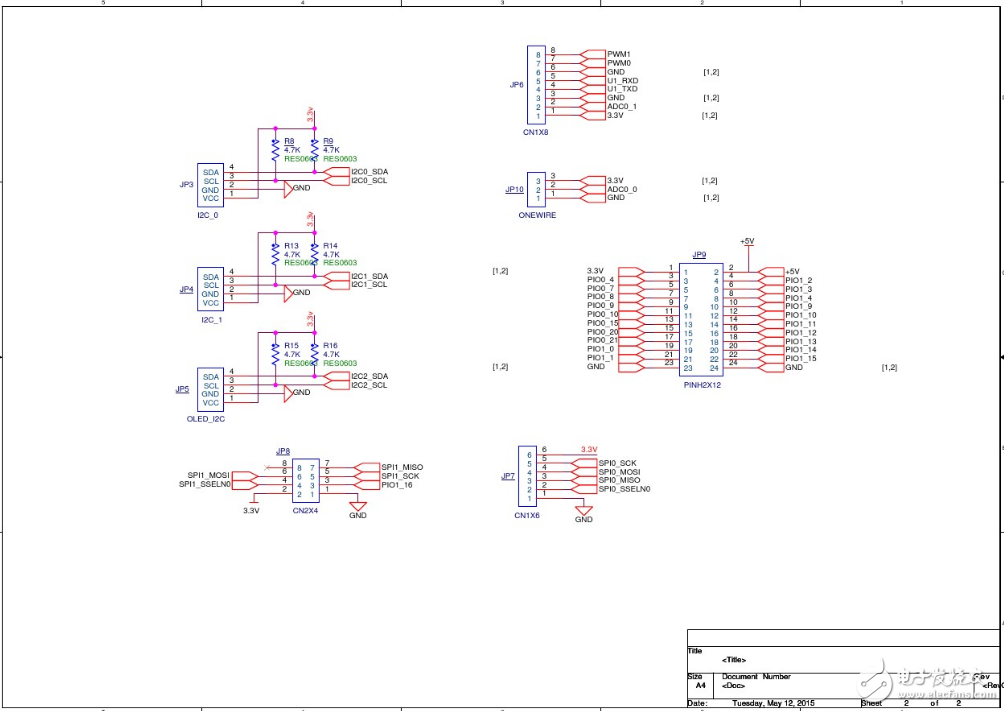
LPC54102开发板介绍原理图
lpc54102例程:一
下面我们以万利开发板的心率计应用笔记的LPC54102例程移植来做分析讲解。
由于万利开发板的不同设置,以及没有PulseSensor传感器,需要做一定的修改移植,使用万利开发板上的AIN1作为模拟输入,电位器的来回旋转代表心跳的变化。
1、代码修改
由于万利开发板使用PIO1_4/AIN7作为电位器输入,因此在初始化代码中,做了如下修改:
其中在board.h中,取消了BOARD_NXP_LPCXPRESSO_54102的定义,而是重新定义了BOARD_MANLEY_LPC54102。
并在各个初始化代码中,增加了针对万利开发板的初始化代码。
#if defined(BOARD_NXP_LPCXPRESSO_54102)
/* SEQ_A enables channels 0, 3 and 4; Uses software trigger; doesn‘t use BURST */
#define ADC_SEQ_A_CONFIG
TRIG_SOFT | /* Software trigger for SEQ_A */
TRIG_POL_POS | /* UM recommends this for S/W trigger */
MODE_EOS | /* Event generated after Sequence done */
ENABLE_CH(3) /* Associate channels 3 to SEQ_A */
#elif defined(BOARD_MANLEY_LPC54102)
#define ADC_SEQ_A_CONFIG
TRIG_SOFT | /* Software trigger for SEQ_A */
TRIG_POL_POS | /* UM recommends this for S/W trigger */
MODE_EOS | /* Event generated after Sequence done */
ENABLE_CH(7) /* Associate channels 7 to SEQ_A */
#endif // #if defined(BOARD_xxx)
static void ADC_PinMuxSetup(void)
{
#if defined(BOARD_NXP_LPCXPRESSO_54102)
/* All pins to inactive, neither pull-up nor pull-down. */
Chip_IOCON_PinMuxSet(LPC_IOCON, 1, 0, IOCON_MODE_INACT | IOCON_FUNC1 | IOCON_ANALOG_EN);
#elif defined(BOARD_MANLEY_LPC54102)
/* All pins to inactive, neither pull-up nor pull-down. */
Chip_IOCON_PinMuxSet(LPC_IOCON, 1, 4, IOCON_MODE_INACT | IOCON_FUNC1 | IOCON_ANALOG_EN);
#endif
}
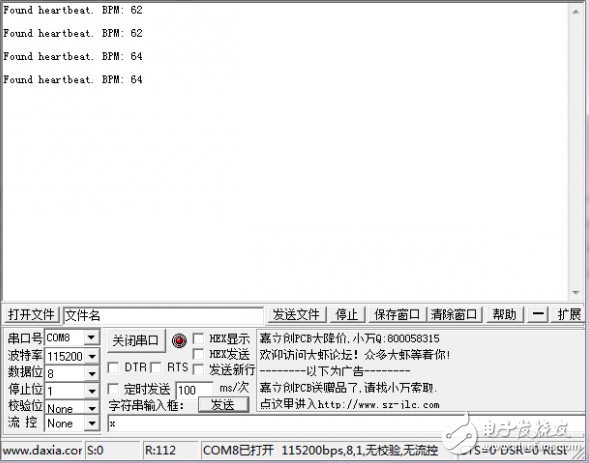
2、运行
其余基本不变,下载后,将电位器来回旋转,可以看到串口输出了心跳数据。
3、代码分析
该应用基本采用CM4初始化后即进入休眠。
CM0+核初始化ADC、Timer之后,进入休眠。
每秒20次唤醒后,采样ADC,当采样过半时,调用Compute_Heartrate算法计算是否产生心跳以及心跳间隔IBI。当发现后即输出串口信息。
关键在于Compute_Heartrate算法,该算法采用PulseSensor官方的算法,基本是通过判断ADC模拟量发现峰值、过半点等运算。
void Compute_Heartrate(void)
{
inti, N, Signal, runningTotal, current_sample = 0;
while(current_sample 《 SAMPLE_FREQUENCY/2){
Signal = temp_data[current_sample];
/* Keep track of time in milliseconds with sampleCounter variable */ sampleCounter = sampleCounter + 50;
/* Monitor the time since last beat to avoid noise */
N = sampleCounter - lastBeatTime;
/* Find the peak and trough of the pulse wave, avoid dichrotic noise by waiting 3/5 of last IBI */
if(Signal 《 thresh && N 》 (IBI/5)*3){
if (Signal 《 T){
/* Keep track of lowest point in pulse wave in the T variable */ T = Signal; } } /* Use threshold condition to filter out noise, store peak in P */ if(Signal 》 thresh && Signal 》 P){
P = Signal; } /* Analyze the data to find heartbeat */
f(N》500){
/* Avoid high frequency noise */
if((Signal》thresh)&&(Pulse==0)&&(N》(IBI/5)*3)){ Pulse=1; IBI=sampleCounter-lastBeatTime; lastBeatTime=sampleCounter; if(secondBeat){ secondBeat=0; for(i=0;i《=9;i++){ rate[i]=IBI; } } if(firstBeat){ firstBeat=0; secondBeat=1; continue; } /* Keep a running total of the last 10 IBI values */ runningTotal=0; for(i=0;i《=8;i++){ rate[i]=rate[i+1]; runningTotal += rate[i]; } /* Average the latest IBI values and calculate the BPM */ rate[9]=IBI; runningTotal+=rate[9]; runningTotal/=10; BPM=60000/runningTotal; QS=1; } }
/* Once the beat is over, reset values */
if (Signal 《 thresh && Pulse == 1){
Pulse = 0;
amp = P - T;
thresh = amp/2 + T;
P = thresh;
T = thresh; }
/* If we do not detect a heart beat in 2.5 seconds, reset all values */ if (N 》 2500){
thresh = 2548;
P = 2548;
T=2548; lastBeatTime= sampleCounter;
firstBeat = 1;
secondBeat = 0; } current_sample++; } }
lpc54102例程:二
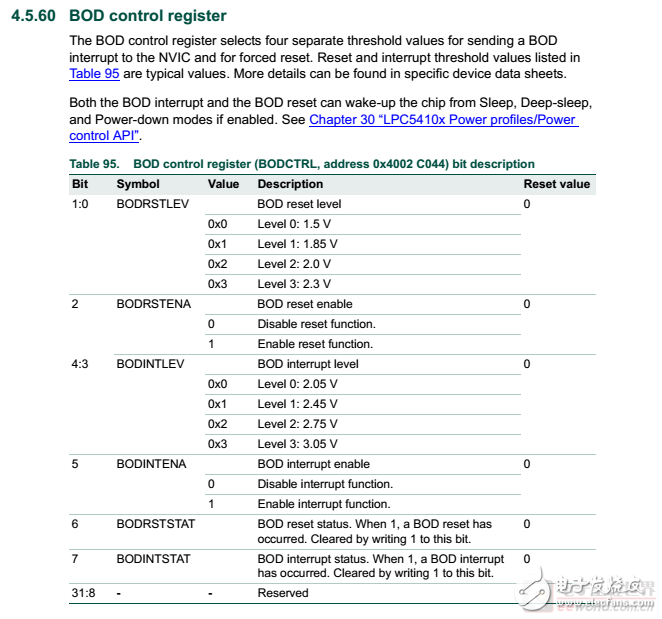
LPCOpen_V2.14_LPC5410x的Peripheral例程
BOD是在设置了BOD中断电压水平(INTLEVEL),同时设置了重启电压水平(RSTLEVEL)之后,使能中断与重启,
源程序如下:
/* Set BOD detection interrupt to 3.05v and device reset to 1.5v */
Chip_PMU_SetBODLevels(PMU_BODRSTLVL_1_50V, PMU_BODINTVAL_3_05v);
/* Enable BOD reset and interrupt on low power level */
Chip_PMU_EnableBODReset();
Chip_PMU_EnableBODInt();
/* Enable BOD interrupt */
NVIC_EnableIRQ(BOD_IRQn);
为了方便观察BOD中断的运行,在中断中设置Board_LED_Toggle需要修改如下:
/* Brown-out detector interrupt */
void BOD_IRQHandler(void)
{
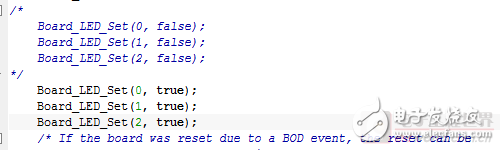
/* Turn on LED */
for(int i = 0; i 《 1000; i++) {
Board_LED_Toggle(1);
}
}
最终运行效果要求正常运行LED是熄灭的,而掉电过程中BOD中断使得LED闪亮,由于万利的板子是低电平点亮LED,因此在初始化阶段应该吧Board_LED_Set()的参数改为true,高电平之后LED熄灭。然后在BOD中断中可以blink闪亮。
运行效果可以通过拔掉供电电源(本人的为JLINK直接给板子供电,在jlink commander中输入Power off就可以)。此时LED会闪亮一下马上熄灭(断电)。
/**
* @brief PMU register block structure
* @note Most of the PMU support is handled by the PMU library.
*/
typedef struct {
__I uint32_t RESERVED0[4];
__I uint32_t RESERVED1[4];
__I uint32_t RESERVED2[4];
__I uint32_t RESERVED3[4];
__I uint32_t RESERVED4;
__IO uint32_t BODCTRL;
__I uint32_t RESERVED5;
__I uint32_t RESERVED6;
__IO uint32_t DPDWAKESRC;
} LPC_PMU_T;
#define LPC_PMU_BASE 0x4002C000UL
#define LPC_PMU ((LPC_PMU_T *) LPC_PMU_BASE)
(3)CLKOUT
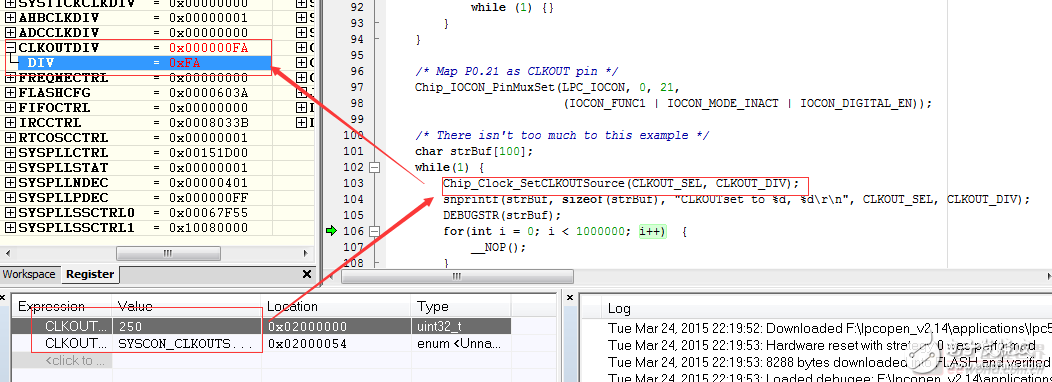
在P0.21(CLKOUT)引脚上可以测量如下时钟信号:
CLKOUT_DIV = 250
CPU被调试器暂停后,CLKOUT依然继续输出。
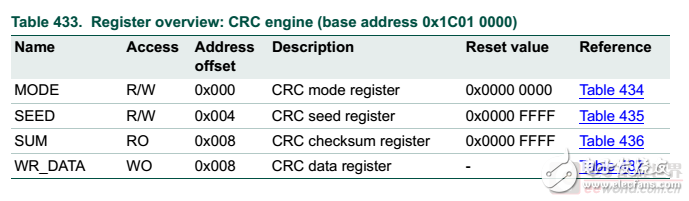
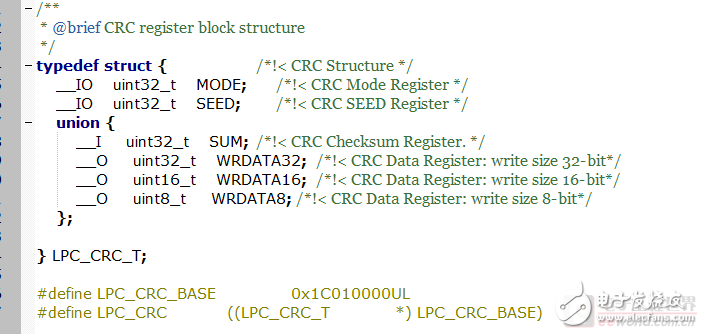
(4)CRC
CRC只需要运行例程即可。
CRC的功能定义和代码如下:
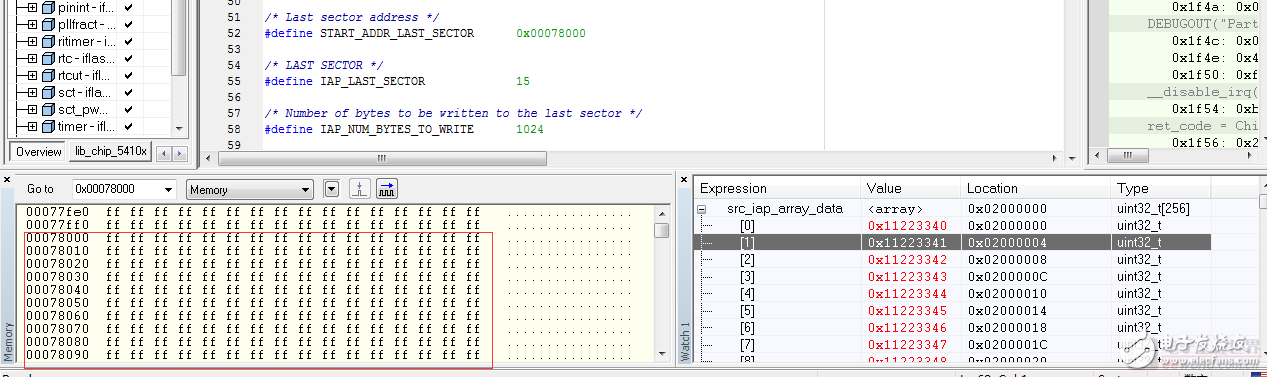
(5)IAP
IAP只需要运行例程即可。
在IDE中观察memory,地址为0x00078000,可见在运行Chip_IAP_CopyRamToFlash前后的flash存储内容发生了变化。
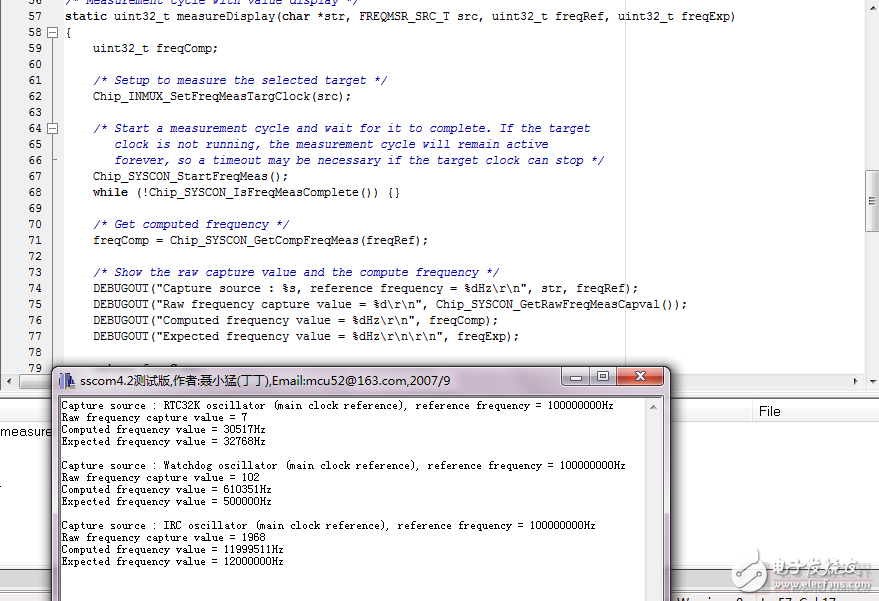
(6)FreqMeasure
只需要运行例程即可。
-
使用LPC-Link2调试器和LPC54102J512 MCU设置pyOCD,运行pyocd list时报错怎么解决?2023-06-05 1279
-
LPC54102 SPI最大频率是多少?2023-04-17 487
-
LPC54102如何确定该事件是“上升沿”事件还是“下降沿”事件?2023-03-20 602
-
BMA423是什么?有哪些特性?LPC54102有何功能?2021-06-28 2259
-
OM13077,用于Cortex-M MCU的LPCXpresso54102开发板2019-11-08 2712
-
LPC54102开发板电路图_LPC54102开发板评测2017-12-11 6692
-
lpc54102引脚图_lpc54102引脚说明2017-10-20 2608
-
基于LPC54102的开发板电路原理图2017-09-08 1127
-
LPC824例程及教程2016-11-22 3744
-
12864例程2016-05-27 860
-
UART0例程2016-05-18 727
-
msp430f5529例程2016-01-19 2336
-
STM32例程2015-12-21 1425
-
BMP180数据手册+STM32例程+51例程2015-11-12 9043
全部0条评论

快来发表一下你的评论吧 !
