

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!
描述
随着国内人形机器人争相登场,具身智能技术也在不断突破。其中,高性能关节作为人形机器人的核心动力元件,对机器人的运动能力、精准度和灵活性起着至关重要的作用。
适用于人形机器人的关节不仅需要具备基础的稳定性,还必须具备低能耗和低摩擦损失的特性。由于人形机器人在行走或拟人作业运动过程中,关节必须频繁的进行正反向运动和快速的加减速操作,就要求关节能够在严苛的运行条件下高效工作,包括并且能在短时间内承受过载。
此外,当人形机器人进行诸如快速奔跑或弹跳等高动态运动时,关节必须有高过载能力和高动态响应能力,这就需要关节模组具备瞬时爆发式的功率输出能力,这意味着在执行某些高动态任务时,整个驱动器的惯性应尽可能低,以缩短机器人关节从接收到指令信号到完成指令要求的工作状态的响应时间。此外,在部分人形机器人需要进行高速、高负载的运行应用场景中,对关节模组的功率密度和扭矩提出了更高的要求。
为满足新老客户在定制人形机器人一体化关节时的最新需求,泰科机器人在结构设计、材料选择和定制化开发等方面不断推出创新方案,产品全系可覆盖人形机器人全身关节需求,包括上肢、腰部、下肢和头部等多个部位,并已支持多种形态机器人的开发。高度集成化的关节模组不仅缩短了行业客户在硬件开发上的周期,还使得自由组合和简化组装过程成为可能,加速了具身智能化机器人产品的快速落地与部署。
 人形机器人关节模组
人形机器人关节模组
泰科机器人很早就开始布局人形机器人核心零部件领域。近年来与多家国内高端人形机器人行业客户进行深度合作,坚持客户为先,追求高效实干,专注于创新研发,力争成为人形机器人产业链上高性能国产替代的领军企业。泰科机器人HJX系列关节模组,旨在为人形机器人提供最佳的动力元件选型方案,产品轻量化结构设计,专门为人形机器人开发进行优化,已有多种规格,并提供定制化服务,支持EtherCAT或CANopen(可选)通讯协议。
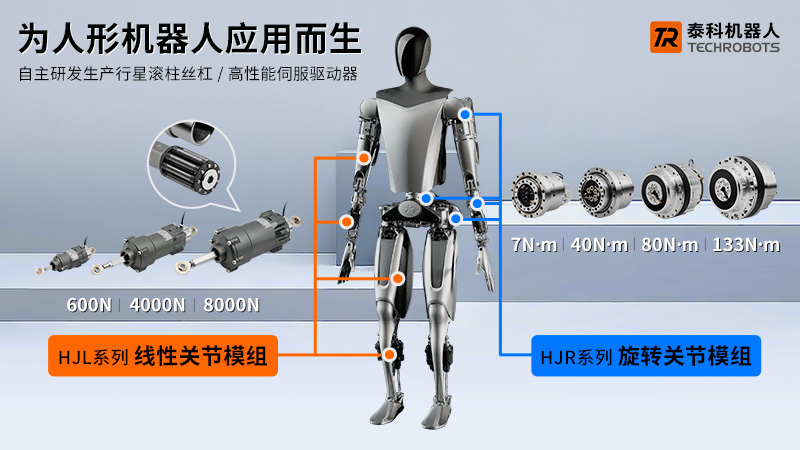
HJL系列线性关节模组
目前有HJL08、HJL12和HJL15三个系列,利用行星滚柱丝杠结构产生强大推力,内部集成拉压力传感器, 最大推力分别达到600N、4000N和8000N,最大速度可达120mm/s、300mm/s、400mm/s,灵活应用在人形机器人的上臂、前臂、大腿及小腿等处,满足人形机器人四肢的肘、腕、膝、踝关节高负荷运行。
 线性关节模组参数
线性关节模组参数
HJR系列旋转关节模组
目前有HJR14、HJR17、HJR20、HJR25四个系列,使用创新的谐波减速器结构,重量相较老版本减少25%以上,在保持扭矩等输出性能的同时,使关节模组整体轻量化进一步提升。其中HJR25最大平均负载转矩133N·m,最大瞬时转矩可达376N·m。内部还集成了单维力传感器,提高人形机器人头、肩、肘、腰、髋关节运动的精确需求。
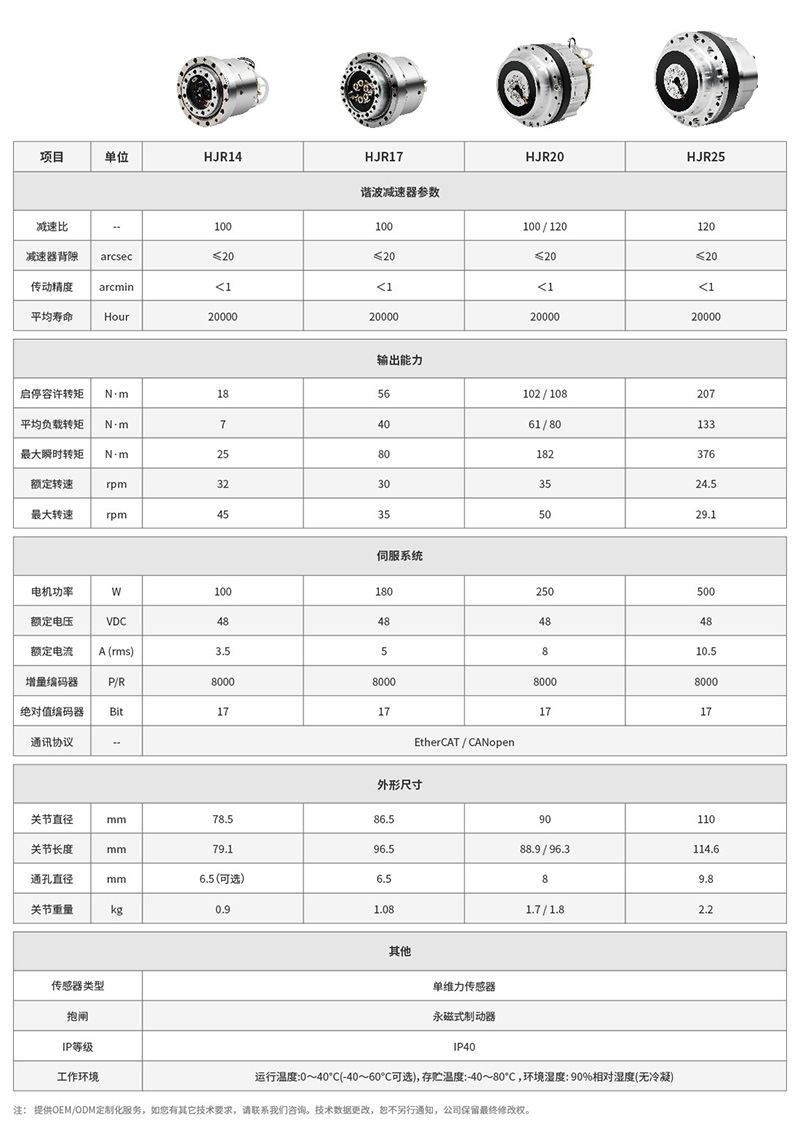 旋转关节模组参数
旋转关节模组参数
深圳市泰科智能机器人有限公司拥有3200平米研制基地,始创于2008年,依托多年低压伺服驱动的核心技术积累,2016年开始研发协作机器人本体和关节模组,凭借追求卓越的定制开发能力,始终坚持以客户独特需求为中心,提供高效、成熟、快速、可靠的各类解决方案。2023年10月,泰科机器人正式被认定为国家高新技术企业,同时也建立了覆盖全国的销售、技术支持及售后服务体系,获得了众多客户的青睐。已与数十家企业、研究院所与高校建立了长期合作关系,为客户定制各类关节模组、人形机器人、双臂机器人、多轴协作机械臂、伺服驱动等系列产品。
-
名单公布!【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!2024-11-11 4951
-
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块2024-12-19 2365
-
【「具身智能机器人系统」阅读体验】+初品的体验2024-12-20 1732
-
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习2024-12-27 2525
-
【「具身智能机器人系统」阅读体验】1.初步理解具身智能2024-12-28 1901
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型2024-12-29 1920
-
【「具身智能机器人系统」阅读体验】+两本互为支持的书2025-01-01 1893
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块2025-01-04 2293
-
为什么人形机器人更讨人喜欢?2016-05-12 5291
-
关于协作机器人关节模组的介绍2021-04-15 3291
-
RJSIIZ机器人关节模组2023-04-20 2137
-
剑指人形机器人赛道,泰科机器人推出重磅关节模组2023-11-22 1902
-
泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展2024-05-10 2633
-
泰科机器人获奖,开启人形机器人关节模组新动力2024-12-05 2312
-
最新发布!泰科机器人发布首款自研双足人形机器人2025-09-02 3748
全部0条评论

快来发表一下你的评论吧 !
