

基于MATLAB平台的智能底盘的虚拟化开发
描述
智能底盘是汽车电动化和智能化趋势下的关键创新点,它涉及到三电系统的集成、机械部件的精简以及电控能力的增强。随着辅助驾驶系统(如 ACC、AEB)的普及和自动驾驶技术的发展,智能底盘需要适应越来越多的使用场景,同时提供更高水平的安全性和舒适性。
在传统汽车设计中,底盘系统被划分为驱动、制动、转向和悬挂四个独立的子系统,这种设计导致了信息孤岛、设计目标不一致、调校工作量大和控制失稳的问题。各子系统追求不同的优化目标,缺乏有效的信息共享和协调,使得整车性能优化和调校变得复杂。为解决这些问题,引入了底盘集成控制(ICC)和车辆域控制(VDC)等先进控制策略,通过实现各子系统间的信息共享和协调,统一优化目标,显著提升整车性能,减少调校工作量,并降低控制失稳的风险,推动了汽车技术向智能化和高效化方向发展。
因此,目前底盘域控中,业界都在关注底盘系统的运动集成控制。比如将驱动扭矩矢量控制和驱动/制动控制结合,通过对扭矩的合理分配,充分挖掘车辆加速潜能,发挥弯道极限,优化动态响应。
面对这样的挑战, 对车辆底盘开发工具提出了两个挑战。一个是虚拟仿真能力,另一个是架构设计工作流的支持。
架构设计工作流的支持:
为了管理和优化底盘系统中的复杂交互,需要有一个支持多学科协作的架构设计工作流。这涉及到从概念设计到最终验证的全过程,包括需求收集、系统建模、性能评估、设计优化、原型开发和测试验证等多个阶段。一个有效的工作流能够确保不同工程领域(如机械、电子、软件)的专家能够紧密合作,共同解决设计中的跨学科挑战。
虚拟仿真能力:
高级的虚拟仿真能力是应对复杂车辆动力学交互的关键。这要求开发工具能够准确模拟和分析车辆在各种环境和条件下的行为,包括但不限于悬挂系统的反应、制动系统的效率以及动力传输系统的性能。有效的仿真工具能够帮助工程师理解各系统间的相互作用,预测潜在的设计问题,并在实际制造之前进行必要的调整。
为了应对这些挑战,开发工具需要具备高度的灵活性和可扩展性,同时提供强大的数据分析和处理能力,以支持复杂的系统级设计和决策过程。此外,这些工具还应该能够集成最新的技术进展,如人工智能和机器学习,以进一步提高设计的效率和创新性
架构设计工作流的支持
在底盘域控制器(Domain Controller)的开发中,由于需要集成和协调多种复杂的功能,开发过程面临着众多挑战。底盘域控制器是一种集成式控制单元,负责管理车辆的多个底盘系统,如动力传动系统、制动系统、悬挂系统和车辆稳定性控制等。
对于底盘系统来说,怎样将客户声音转化为整车架构需求进而分解到底盘功能比如制动系统特征和性能需求上来,对于减少开发迭代有着非常重要的意义。
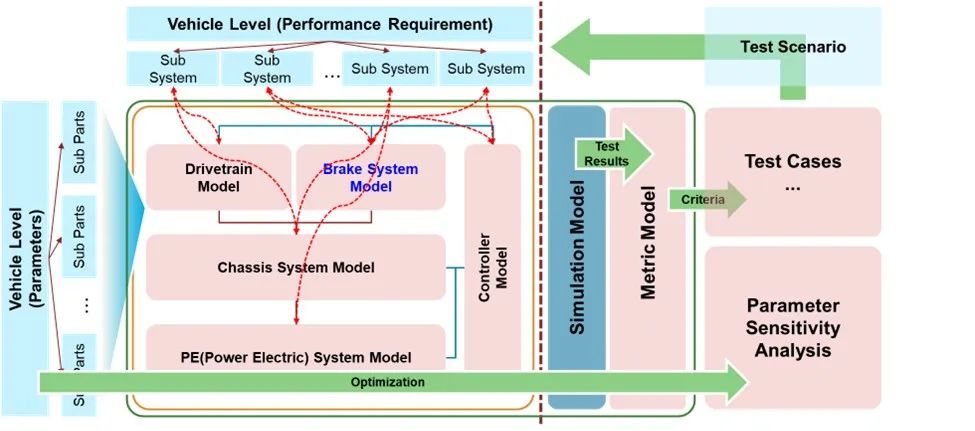
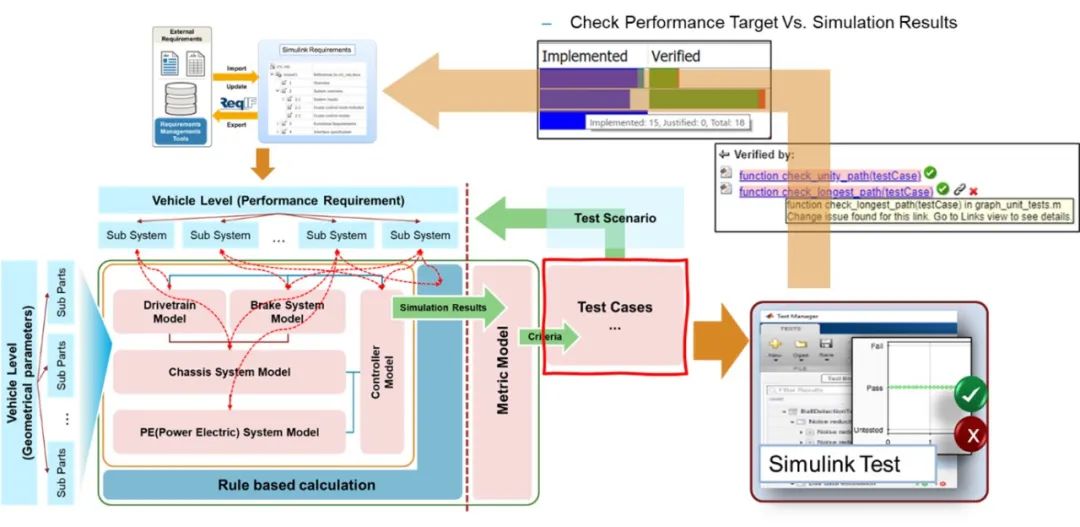
整车架构视角下底盘功能的分解和验证流程,首先将整车级的指标分配给系统并构建仿真模型,定义设计参数并执行测试以验证是否满足要求。如果不符合,则进一步进行参数敏感度分析和优化。在这里我们其实以模型作为虚拟原型对底盘功能是否满足整车指标的验证流程进行了前置。
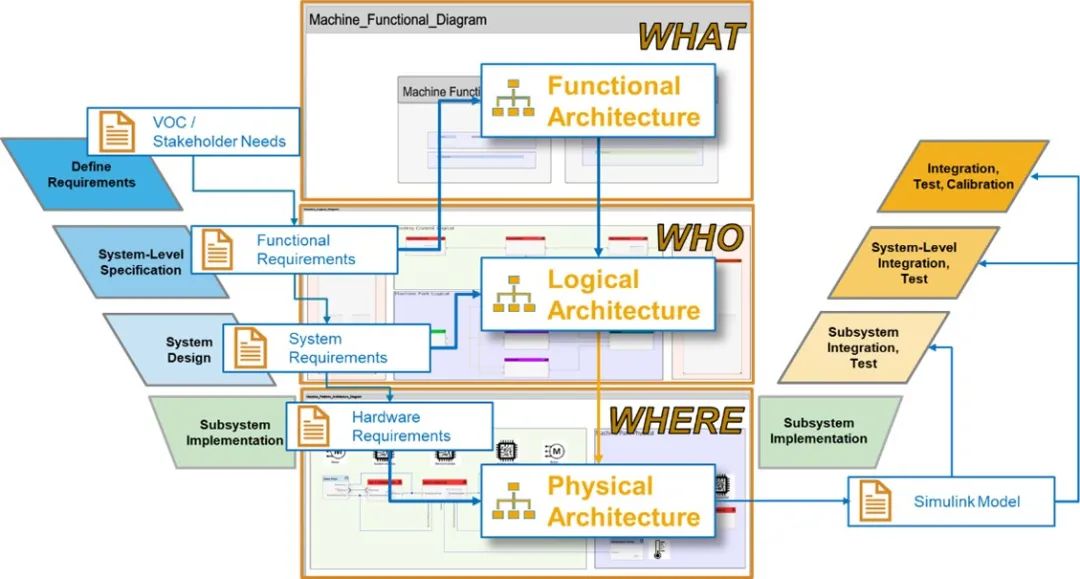
架构设计大致包含:
需求结构化:开发过程首先从对项目需求的详细分析和结构化开始,确保所有需求都被明确并且可以追踪。
功能架构提取:基于结构化的需求,开发团队提取系统的功能架构。功能架构定义了系统应有的功能和这些功能如何相互作用,是将需求转化为具体功能描述的过程。
逻辑架构构建:在功能架构的基础上,进一步发展出逻辑架构。逻辑架构关注功能如何在系统的各个部分之间逻辑分布,包括功能单元之间的逻辑联系和数据流。
物理架构构建 :最后,物理架构将逻辑架构的抽象概念具体化,定义了实现这些逻辑单元所需的硬件和软件组件。
在架构设计的基础上,开发团队可以通过选择和定义特定的组件和算法模型来填充这些架构,进而实现行为的具体化。这为基于仿真的需求验证提供了基础,允许团队在实际构建和测试系统之前,通过仿真环境来验证系统设计是否满足既定需求。
MATLAB System Composer 是一个高效的系统和软件架构设计工具,允许工程师快速构建复杂系统的架构模型并展示其组件、接口与交互。它支持将架构模型直接关联到系统需求,并通过集成的需求管理工具确保设计满足既定需求。此外,System Composer 可以无缝集成 Simulink,使得控制器的细节设计和行为建模变得简单,允许在组件级别定义和模拟控制逻辑。这种集成还支持系统级仿真,帮助工程师在设计初期验证系统架构和控制策略,识别并解决潜在问题,加速开发过程并提高系统质量。
虚拟仿真能力
智能化推动了底盘域控制系统的发展,随之而来的系统复杂度提升要求采用更高效的开发和仿真验证方法。
为了应对智能化带来的挑战,仿真工具的要求超出了仅仅搭建被控对象模型的范畴,还需要能够整合仿真平台,提供一体化的仿真解决方案。MATLAB 在虚拟车辆是提供的解决方案包括车辆建模, 设计控制软件,快速搭建仿真场景,以及部署优化模型。

搭建车辆动力学模型
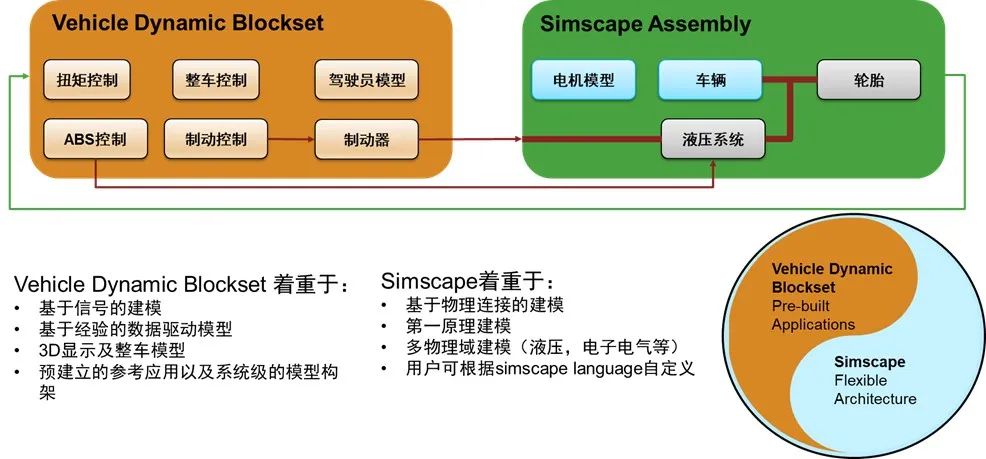
提供了 Vehicle Dynamics Blockset,其中包含了预定义的整车模型和控制器,以及模块库,这些可以用来快速搭建和仿真车辆动力学。
同时可以使用 Virtual Vehicle App 来快速搭建符合应用复杂度的车辆模型。
虽然 Vehicle Dynamics Blockset 提供了一种快速搭建整车模型的方法,便于进行车辆动态分析和控制系统设计,但在处理车辆的一些细节建模时,如制动液压系统、转向机电系统和悬架多体系统等,这种方法可能无法满足精细化程度的建模需求。为此,Simscape 物理建模工具成为了重要的补充。
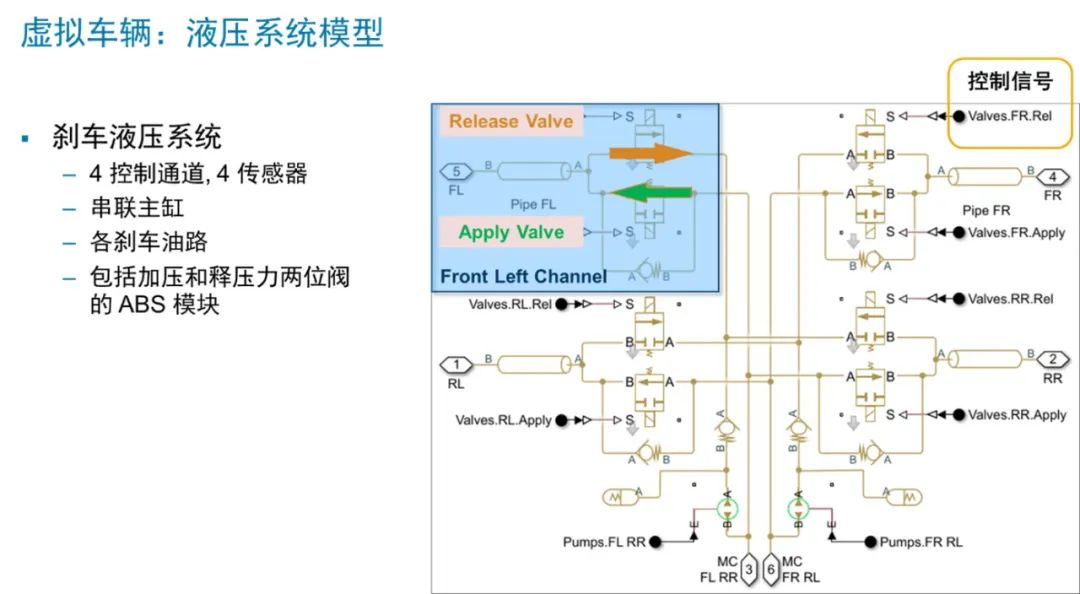
Simscape 允许用户利用物理组件库来构建跨多个物理域(如机械、电气、液压和热能)的模型,这对于精确模拟制动液压系统等复杂系统尤为重要。通过 Simscape,工程师可以创建出接近实际物理行为的模型,这些模型不仅可以用于深入理解系统的工作原理,还可以用于设计和测试控制策略。
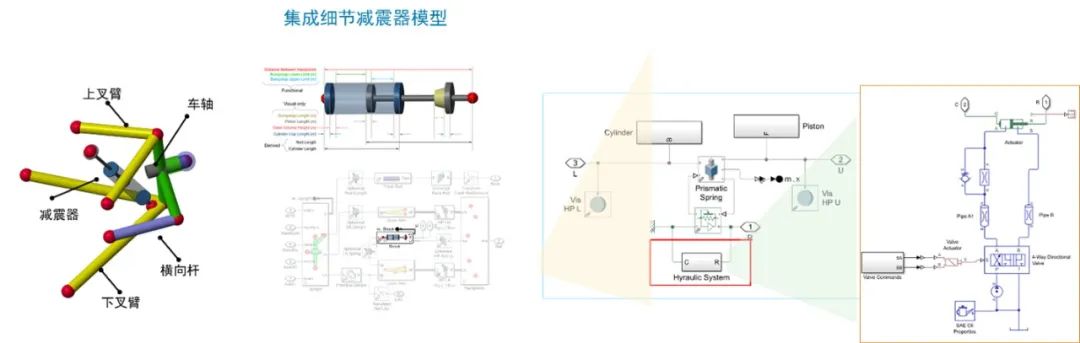
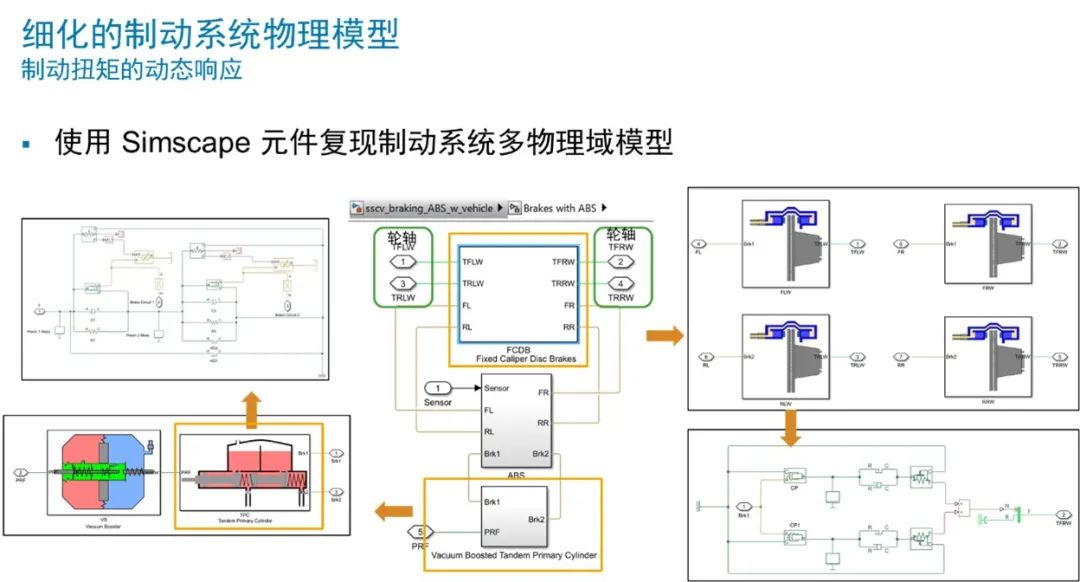
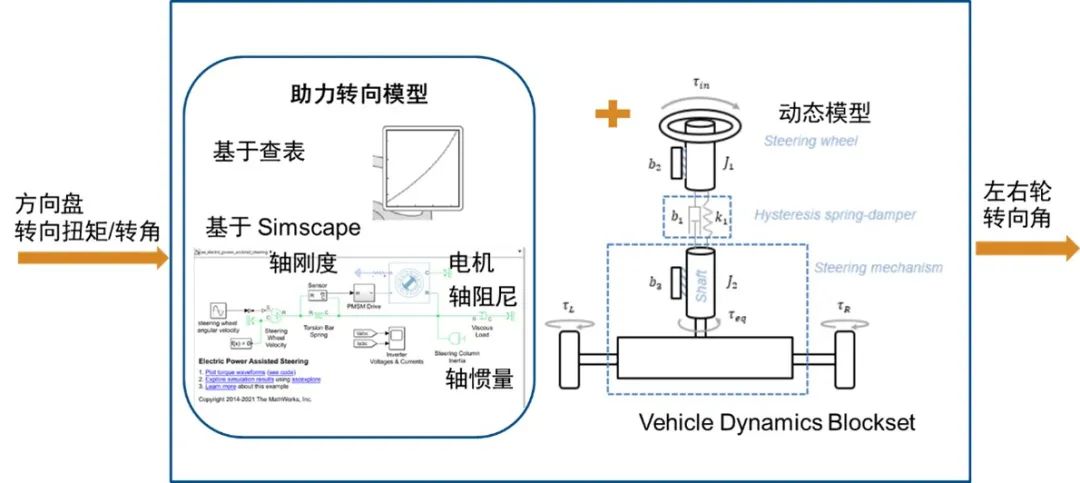
在模拟制动液压系统时,Simscape 可以帮助准确模拟液压流体的动力学行为和系统中各个组件的相互作用。对于转向机电系统,Simscape 能够结合电气和机械系统的动态行为,提供更加全面和精确的模型。而在悬架多体系统的建模中,Simscape 的多体动力学功能能够模拟复杂的机械连接和运动,为悬架系统的分析和优化提供了强大的工具。
通过结合 Vehicle Dynamics Blockset 的整车模型快速搭建能力和 Simscape 物理建模工具的细节建模能力,工程师可以创建出既快速又精确的车辆模型,这对于开发和验证高性能、高智能化的汽车系统至关重要。
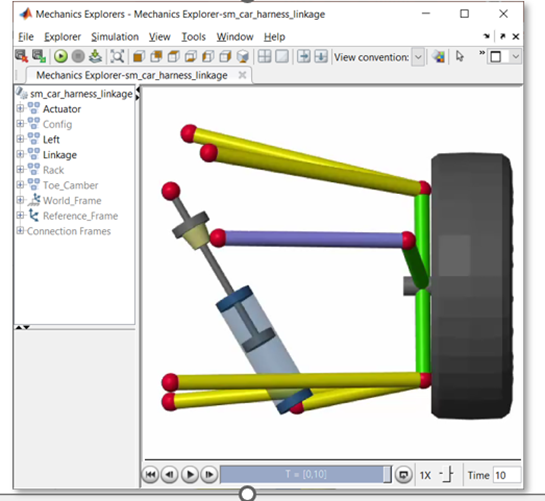
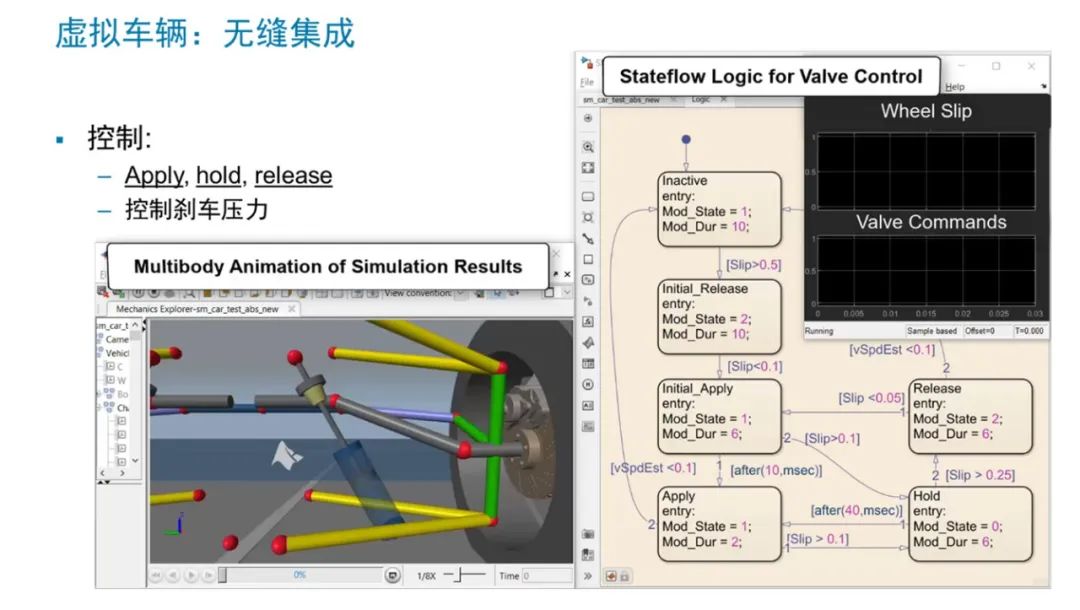
使用 Simscape Multibody 搭建悬架模型:可以设计用于主动或半主动悬架系统的控制算法,以提高车辆的操控性和舒适性。Simulink 提供了一个交互式环境来测试和验证这些控制策略。
电子液压制动系统 :电子控制的制动系统(如 ABS 和电子稳定程序 ESP)可以在 Simulink 中进行模拟,以确保它们在各种驾驶情况下的性能。
转向系统:电子助力转向(EPS)或主动前轮转向(AFS)等系统的控制逻辑可以在 Simulink 中开发和测试。
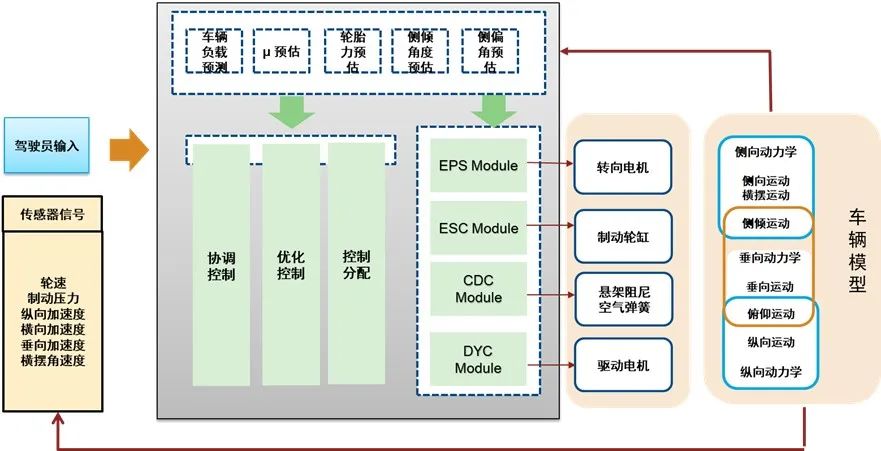
完成了物理模型后,我们可以根据功能需求设计底盘的控制算法。在一个整车底盘控制算中,整体可以分为车辆状态信息观测算法和控制策略方法。
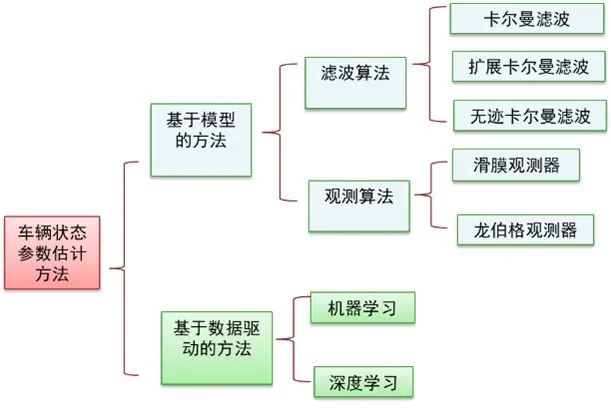
车辆状态信息观测算法是底盘控制系统的基础,它通过对车辆各种动态状态的监测和估计,为控制策略的制定提供了关键数据。这些算法通常需要利用车辆上安装的各种传感器数据,如轮速传感器、加速度计、陀螺仪、转向角传感器等,来观测或估计车辆的状态。
车辆状态信息观测包括车轮扭矩、轮胎力(横向、纵向、垂直)、车速与加速度、地面摩擦系数、坡度、偏航角与偏航率、轮胎参数、前轮转角,以及预期与实际偏航角差。这些数据为车辆控制系统提供精确的运行状态。
但是根据具体需求决定是否需要每个信息都需要观测。
观测方法,可以使用基于 MATLAB 的系统辨识工具箱和控制器设计工具箱,设计不同的观测器。
底盘控制算法包括:基于预控的扭矩分配策略,车辆牵引力控制,横摆控制等。以一个横摆扭矩控制框架为例。
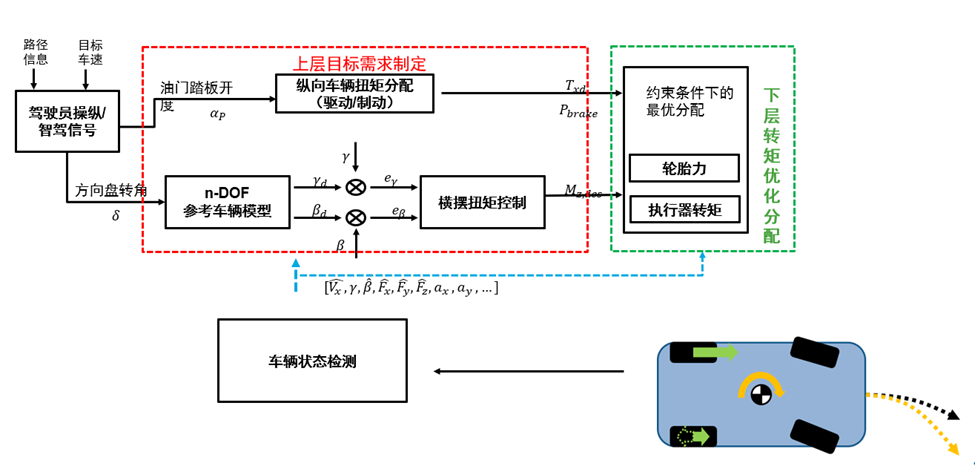
在这个横摆扭矩控制案例的框架中, 包含了上层目标需求的指定和下层转矩分配。
在上层控制中,我们根据驾驶员的方向盘转角信号,做一个前馈控制,计算出目标横摆角速度和目标质心侧偏角。然后与车辆状态观测出的实际横摆角速度和质心侧偏角做反馈控制。
在这个横摆扭矩控制模块中,可以使用基础的 PID 控制。也可以使用 MATLAB 的控制工具箱帮助设计复杂的优化控制等。例如模型预测控制,模糊逻辑控制,以及一些基于学习的控制等。
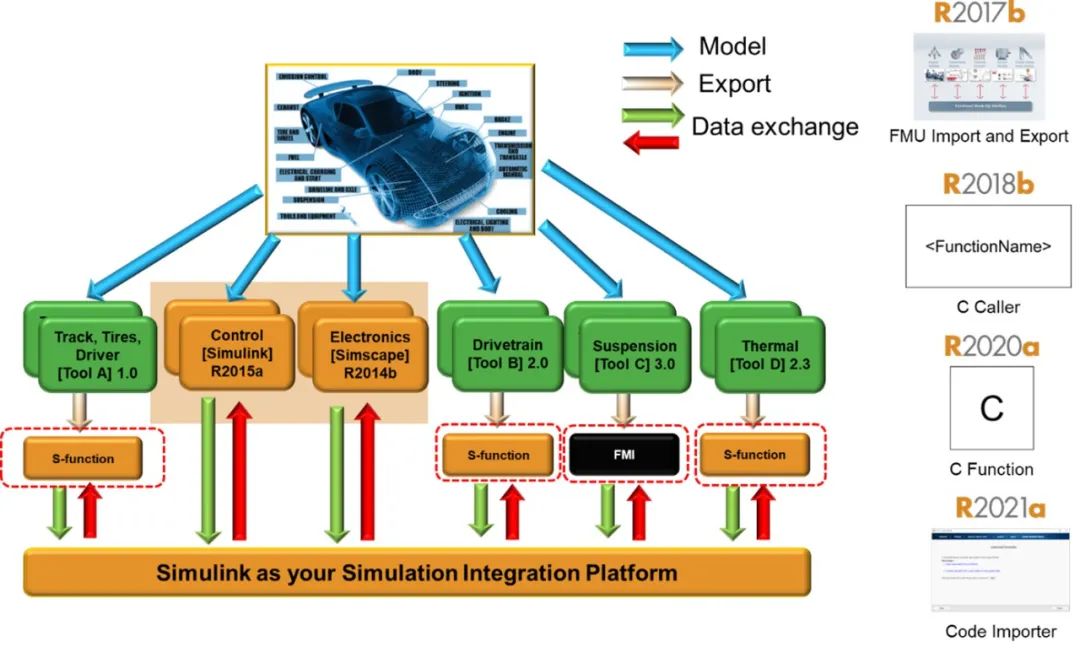
Simulink 在建模之外也是虚拟集成平台,来源于不同领域、不同软件、不同版本的算法、部件、系统和整车模型都可以在这个平台集成并进行仿真,FMU 的导入和导出、C 代码的调用和导入等功能在不断的完善和拓展 Simulink 作为集成平台的能力。
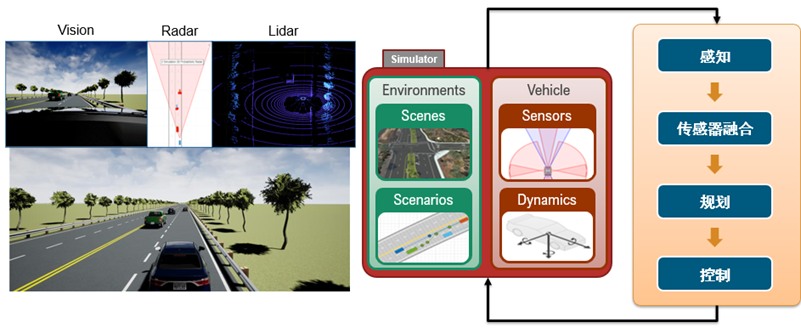
融合了底盘功能的运动控制常常作为智驾的接口,参与到自动驾驶的虚拟验证中。基于MATLAB 平台搭建的整车模型及底盘控制算法,可以集成到与自动驾驶算法仿真中。在 MATLAB 平台上,依托 Roadrunner 场景建模工具,完成车辆与场景的自动驾驶仿真框架。
底盘域控制器是车辆智能化的核心,随着智能化水平的提升,系统复杂度增加,虚拟化开发和验证成为应对复杂度挑战的有效手段。基于模型的开发(MBD)是虚拟化的基石,涵盖了虚拟原型、虚拟集成和虚拟验证三个关键阶段。MATLAB 为这一流程提供全面的解决方案:包括车辆建模,控制设计,集成验证等。这套方法不仅提高了开发效率,降低了错误率,还能在制造实际原型前发现问题,加速智能车辆的开发和市场推广。
-
智能电表开发平台 (SMB 3.0)2015-05-06 3532
-
可进行电力线通信的智能电表开发平台 (SMB 3.0)包括原理图,物料清单及光绘文件2018-07-31 3562
-
如何通过LabVIEW图形化开发平台有效优化多核处理器环境下的信号处理性能2021-04-26 1881
-
可视化开发平台8ms的相关资料推荐2021-12-14 3223
-
8ms可视化开发平台是什么?有何特点2022-01-14 1566
-
虚拟仪器软件开发平台2009-06-22 852
-
MATLAB在LabVIEW开发虚拟仪器中的应用2011-07-04 711
-
基于MATLAB的虚拟示波器设计2016-12-14 1089
-
结合MATLAB开发DSP系统的设计研究与实现2017-10-20 1284
-
NI LabVIEW图形化开发环境与NI硬件平台,开发无人驾驶赛车2018-07-19 2000
-
京东数字科技推出智能机器人通用底盘开发平台2018-12-12 11126
-
如何使用Myeclipse进行java可视化开发2019-01-10 1258
-
数据可视化开发平台PageNow上线了2020-03-02 4335
-
开发一种基于Matlab与LabVIEW的电机测试平台2023-06-29 2657
-
MATLAB和Simulink助力智能底盘技术革新2024-12-04 1506
全部0条评论

快来发表一下你的评论吧 !
