

正运动邀您共聚2024 CIOE中国光博会!
电子说
描述

■展会名称:
第25届中国国际光电博览会(以下简称:CIOE中国光博会)
■展会日期
2024年9月11日–13日
■展馆地点
中国·深圳国际会展中心(新馆)
■展位号
6A52-10
9月11至13日,深圳国际会展中心将举办第二十五届CIOE中国光博会。
随着光电行业的飞速发展,如何在竞争日益激烈的市场中脱颖而出,已成为各方关注的焦点。正运动技术将在2024 CIOE中国光博会上,携解决方案为您解答这些关键问题:
如何提升效率与精度?
如何有效控制成本?
如何实现多轴同步控制以灵活应对复杂的加工需求?
如何在市场变局中挖掘新机遇,盘活产业上下游的存量市场?
在本次光博会上,正运动将重点展示基于EtherCAT总线控制的热门产品,并带来精彩的EtherCAT精密运动控制解决方案与机械手应用解决方案。EtherCAT总线控制产品不仅能够大幅提升系统效率,还显著降低了运维成本,助力客户在激烈的市场竞争中实现持续增长。
EtherCAT总线控制产品分享
1、PCIE464M–高速高精,超高速PCIe EtherCAT控制卡
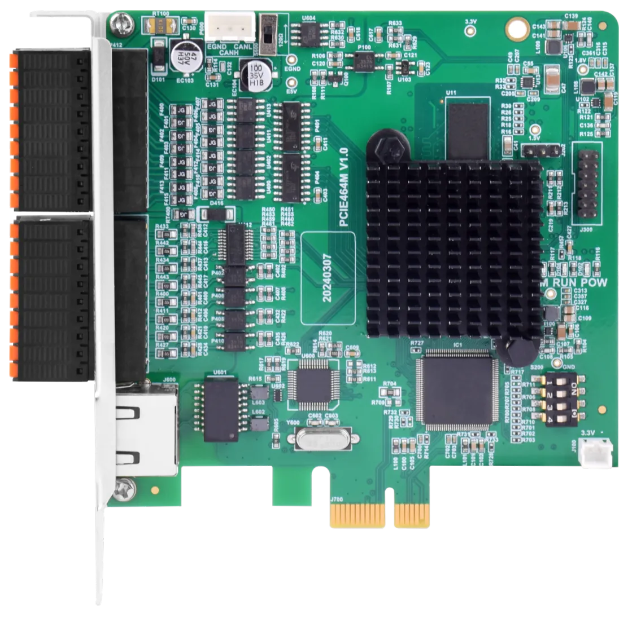
可选6-64轴运动控制,支持EtherCAT总线/脉冲/步进伺服驱动器
联动轴数最高可达16轴,控制周期最小为100μs
标配16进16出,其中4路高速锁存输入、4路高速PWM和12路高速硬件比较输出PSO
支持PWM输出、1D/2D/3D PSO硬件位置比较输出、视觉飞拍、连续轨迹插补等
支持30+机械手模型正逆解模型算法,比如SCARA、Delta、UVW、4轴/5轴 RTCP...
支持掉电存储和掉电中断,多重加密,提供程序更安全机制
具有一维、二维螺距补偿控制,实现更高的加工精度
8路单端脉冲轴、4路单端编码器轴
2、ZMC408CE–高性能8轴EtherCAT总线运动控制器
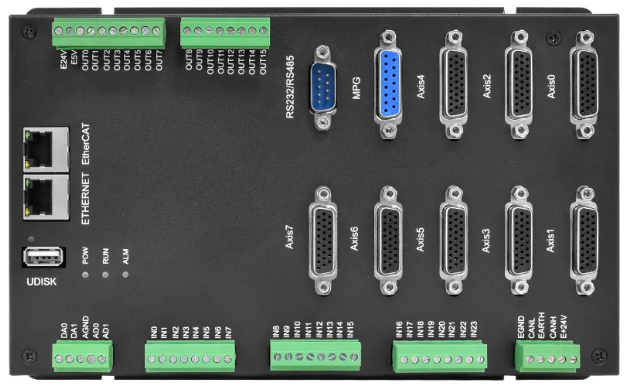
可选8-32轴运动控制,支持EtherCAT总线和脉冲轴混合插补
EtherCAT同步周期可快至125μs
专用的手轮输入接口
高性能处理器,可提升智能设备的运算速度、响应时间和扫描周期
板载24DI和16DO,其中4路高速色标锁存,8路PSO和高速PWM
一维/二维/三维、多通道视觉飞拍,高速高精
多轴同步控制,多坐标系独立控制
支持30+机械手模型正逆解模型算法,比如SCARA、Delta、UVW、4轴/5轴 RTCP...
可PC上位机开发,也可脱机独立运行
3、ECI2828-V2–经济型8轴网络型运动控制卡
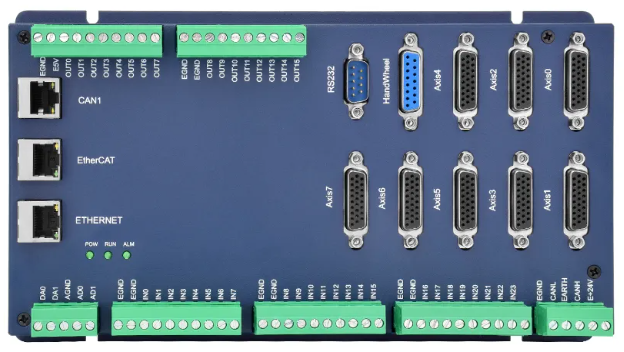
可选8-16轴运动控制,支持EtherCAT总线和脉冲轴混合插补
EtherCAT同步周期可快至250μs
专用的手轮输入接口
支持网口通讯,可实现控制器与多个网络设备的远程通信
RS232串口可连接第三方仪器仪表,进行数据采集及调度监控
板载24DI和16DO,其中4路高速色标锁存,4路PSO和高速PWM
支持1D/2D/3D的高速PSO位置同步输出,用于视觉飞拍、精密点胶胶量控制和激光能量控制等
可调用统一的API函数接口,进行上位机开发
RTFuse开放式视觉机械手系统

系统概括
RTFuse开放式视觉机械手系统是基于VPLC机器视觉运动控制一体机为基础研发的,可拖拽式视觉运动控制简易编程平台。
该系统针对机械手行业的特定应用需求量身定制,引入了多种应用工艺包。在降低客户操作门槛的同时,RTFuse开放式视觉机械手系统亦能为不同工艺深度的应用提供一站式的视觉运动控制解决方案。
产品优势
▌技术门槛低
拖拽式中文组态系统编程,经过简单培训,应用工程师可轻松上手,从上至下执行项目控制流程,机器人位置手动示教。
▌系统开放性强
支持多线程控制,除机器人控制外,也可以控制其它附加轴、IO逻辑控制、通讯交互等,一个控制器即可完成。
▌企业用人成本低
一人即可调试设备的运动控制、视觉、IO逻辑控制等,解决工程人员流失、用人成本高等问题。
▌软硬件集成性强
集成EtherCAT总线、脉冲混合控制,机器视觉、运动控制,集软硬件于一体易于设备调试与排除问题。
▌支持多种机械手正逆解算法
4轴模组、SCARA机械手、Delta机械手、直角坐标机械手、6关节等
我们诚挚邀请您莅临6A52-10展位,与我们的专业团队面对面交流,共同探讨光电行业工业自动化的新思路与合作契机。
审核编辑 黄宇
-
升谱光电亮相2025中国光博会2025-09-16 1091
-
大立科技亮相2025中国光博会2025-09-11 1370
-
大立科技邀您相约2025中国光博会2025-09-08 1072
-
福晶科技邀您相约2025中国光博会2025-09-05 1066
-
兆易创新邀您相约2025中国光博会2025-09-03 1562
-
2025中国光博会:昊衡科技与您相约!2025-08-15 1639
-
圆满收官!昊衡科技2024中国光博会之旅精彩纷呈2024-09-15 1217
-
2024CIOE中国光博会:昊衡科技在10B29,欢迎您来!2024-08-30 1275
-
展前预告|易天光通信“拍了拍你”邀您共赴第二十四届CIOE中国光博会2023-08-29 912
-
2023深圳智博会,正运动助力智能装备“更快更准”更智能!2023-08-25 1685
-
捷杰传感邀您共聚2022 中国工业设备智能运维技术大会2022-07-11 1160
-
易天光通信带您直击CIOE中国光博会现场2018-09-06 1871
-
第十五中国光博会:引领全球光电产业新趋势2013-08-26 1642
-
把握光通信行业演变脉动 CIOE2012光通信展即将起航!2012-08-16 3409
全部0条评论

快来发表一下你的评论吧 !
