

妆后FACE ID认不出?iPhone X:我这脸刷得可没那么肤浅!
MEMS/传感技术
描述
不用说,上周的iPhone X 那是火遍了每一个头条。最大的两个看点,一是全屏幕(在聊iPhone X“AMOLED全面屏”前,你需要知道这些…);再就是把在手机上没得意几年的Touch ID踢出了局,取而代之的是调调极其高的Face ID(人脸识别),江湖俗称“刷脸”。
iPhone X 的刷脸功能,啊不,是Face ID
虽说人脸识别已不是什么全新技术,但真正在手机上实现也是足够狂拽酷炫的。不过,这个功能一经发布便迅速遭到了一群爱撸妆小仙女们的质疑:

妆后FACE ID认不出?iPhone X就呵呵了,并表示瓜众们还是 too young too simple, sometimes naïve!
答案当然是否定的。简单地说,Face ID基于3D(深度)成像技术,并不会“肤浅”的去看“长相”,而是通过获得位置信息来进行3D成像。实现这一技术的基础元件,便是接下来我们要聊的“深度相机”了。
深度相机:没有我,3D成像成不了
深度相机是一种特殊的相机,和传统相机不同,除了能拍出物体的平面图像外,还能测量出物体到相机位置的距离,从而实现3D(深度)成像。
它的原理主要有三种:双目成像、结构光、飞行时间。
1.双目成像
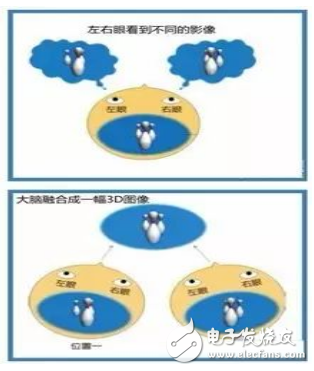
我们的双眼之所以能看到立体的图像,是因为两眼存在瞳距,在一定距离观看物体时,两眼会接收到不同的视觉图像。而大脑能够很巧妙地通过眼球的运动、调整,将有细微差别的两幅画像融合,感知到生理深度暗示,从而产生立体感。这就是双目立体视觉的基本原理。

熟悉的3D电影是双目立体成像原理的应用之一
双目立体成像就是根据该原理,获取、产生和传输一个空间场景,并将这个场景展现成具有立体感的景象。
这是一种比较传统的技术,使用两个可见光的图像传感器,通过双目匹配就能够实现。这种方法虽然成本低,图像分辨率高,但是算法非常复杂,且是一种被动测量方法,目标物体需要有良好的特征变化,不然无法实现。
2.结构光
基本的结构光方案所基于的原理是光学三角法。研究发现,当把一些特殊形式的光投到有不同深度的物体上时,光的纹路会发生变化,而我们可以通过采集这些纹理变化,来计算位置和深度,进而复原整个三维空间。

例如光带打到物体上,遇到突出的物体条纹就会改变原有的状态,或断开,或弯曲,其程度取决于物体各部分的深浅。直接打到平面,条纹则不发生改变。
结构光系统主要由光投射装置(常见的为近红外光)、摄像机、图像采集及处理系统组成。
其中,摄像机采用图像传感器配合窄带滤光片和镜头的方式,接收不同位置的回波光信号,进而成像。

右图为调制好的近红外条纹光,左图为近红外CMOS图像传感器成像的灰度图
第一步的成像质量直接影响接下来的图像处理,这就需要图像传感器在近红外波段具有极高的灵敏度,特别是对于一些高精度要求的识别系统应用。

滨松深度相机用高灵敏度CMOS图像传感器


近红外波段高灵敏度表现

高速捕捉能力表现
成像后接下来的工作,就交给图像采集及处理系统了:
来源:结构光的概念及其实现三维成像的主要原理是什么?Lee Mr回答内容,知乎
激光器发出的光束经过光学系统形成的不光有条纹的,还有包括点、单线、单圆、同心多圆、网格、十字交叉等多种散斑形态,通过特征编码直接获取特征点。与普通条纹光相同,其他特征图形也都是通过在景物上形成特定的图案,成像后进行图像处理,后对图案深度或距离信息进行提取。
iPhone X也正是采用的结构光来实现Face ID的。还记得那屏幕上端抢眼的“刘海”吗?置于其中的是一套称作“原深感摄像头”的系统,除了常规器件,还加入了红外摄像头、点阵投射器、泛光感应元件,也就是Face ID的核心元件。其通过投射超过3万个光信息识别点,由摄像头收集信息并通过算法分析,实现了它的人脸识别。
3.飞行时间(TOF)
通过捕捉光从发射到接收的飞行时间,判断物体距离,这就是测距中常见的飞行时间(Time of Flight,TOF)法。在3D成像应用中,TOF法是基于距离图像传感器实现的。
距离图像传感器芯片的每一个像元对入射光往返物体和相机之间的相位分别进行记录,传感器结构与普通图像传感器类似,但是包含两个快门,用来在不同时间采样反射光线,因此像素尺寸比普通图像传感器尺寸大。另外,照射单元和传感器需要高速信号控制才可以达到想要的精度。


滨松TOF深度相机用距离图像传感器
TOF的深度相机也主要包含三部分,一个高速光源(激光器或LED),一个可以测试飞行时间的距离图像传感器,以及后续处理单元。

左图:深度图像(TOF法成像) / 右图:彩色图像
双目、结构光、飞行时间(TOF),这三种虽然都是深度相机中常用的方法,但他们也各有所长:

技能点的不同也决定了他们着各自擅长的应用领域。双目法对是否有光照、被测物特征区别等外部环境限制较多,但是有分辨率优势,更适合于在环境比较单一的流水线检测等应用上;结构光可以测试比较近的距离,对被测物的要求不高,同时兼顾了深度分辨率,使得它比较适合用在台式设备或者手持设备的人脸识别、体感互动等应用中;TOF虽然在其他方面表现优秀,但是有着深度图像分辨率低的问题,使得它更适合用在动态捕捉、机器人避障等应用上。
iPhone X Face ID的出现又一次掀动了3D成像的热浪,但它也仅仅是洪流中的一个代表。在未来,3D成像也势必将更加普及,从消费民用到科研、军事、医疗等等各个方面,改变我们的生活。
-
iPhone 13或将取消Face ID人脸识别2021-02-01 5149
-
爆料称苹果iPhone SE Plus将会在今年发布:Touch ID回归2021-01-26 1913
-
Face ID可能会被破解的前景令人担忧2019-01-07 3832
-
同是刷脸!支付宝的人脸识别与苹果Face ID有什么区别?2018-12-16 21036
-
Face ID在iPhone X上的成功,是否会引用到自家MacBook上?2018-08-13 4615
-
小米8与iPhoneX的Face ID有什么差别?分析3D结构光技术与供应链2018-06-29 9112
-
华为与苹果PK Face ID技术 称强过iPhone X 10倍2018-01-11 4947
-
iPhone X摄像头+AR、显示屏和Face ID成产品主要卖点2017-12-29 5133
-
叫板iPhone X 面容ID,奥比中光发布3D摄像头挑战苹果2017-12-16 1682
-
廉价版iPhone X将配置七色款式,Touch ID或Face ID尚未定论2017-11-29 1005
-
说说Face ID,说说刷脸技术2017-10-18 6511
-
Face ID刷脸解锁真的靠谱吗?2017-09-21 2325
-
苹果新机演示失败!iphone8发布会人脸别失败被质疑,苹果解释:只是需要密码,Face ID完全没问题2017-09-15 1465
全部0条评论

快来发表一下你的评论吧 !
