

机器人关节模组为何选择双编码器设计?
描述
双编码器的作用
关节模组是机器人关节控制系统中的核心组件,决定了机器人的运动控制与动作精准度。在关节模组中,位置反馈和误差校正是确保精确运动的关键,而双编码器设计正是为此而设计的。
具体而言,双编码器由绝对值编码器和增量编码器组成。绝对值编码器负责提供精准的位置反馈,而增量编码器则负责实时误差校正。通过这两者的协同工作,能够显著提升关节模组的精度和可靠性,确保机器人在复杂任务中的准确表现。
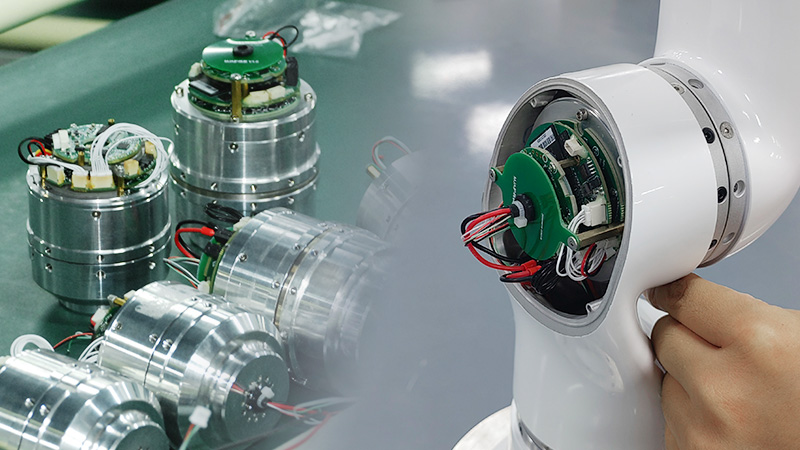 机器人关节模组
机器人关节模组
双编码器设计的优势
1. 提升精度与稳定性:
双编码器系统结合了绝对值编码器的高精度位置反馈和增量编码器的误差校正功能,能确保机器人关节在运动中的每一步都准确无误。即使在动态复杂的环境下,机器人也能保持高度精确的动作控制。
2. 增强机器人的可靠性:
双编码器设计不仅提高了精度,还提升了机器人的可靠性。如果其中一个编码器发生故障,另一个编码器可以及时检测并进行校正,确保关节模组正常稳定的运行。
3. 提高抗干扰能力:
在复杂环境中,外界干扰可能影响机器人的稳定性。通过双编码器共同工作,能够有效减弱干扰对关节运动的影响,确保机器人能够稳定运行,保持高效性能。
综上所述,关节模组采用双编码器设计,核心目的是为了实现位置反馈和误差校正,从而提升机器人的精度、稳定性和抗干扰能力。双编码器的组合不仅让机器人在精密操作中表现更加出色,还为关节模组提供长期的可靠性保障。因此,双编码器设计已经成为先进机器人关节模组的标配,助力机器人在各种复杂应用场景中发挥最佳性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人如何选择编码器方案?2025-07-19 6755
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4422
-
机器人关节用什么电机?2021-05-27 4277
-
关于协作机器人关节模组的介绍2021-04-15 3346
-
码垛机器人编码器2023-03-31 1952
-
RJSIIZ机器人关节模组2023-04-20 2225
-
泰科智能MJX系列关节模组助力机器人弹钢琴2023-07-10 1990
-
编码器在机器人系统中的应用2024-06-13 3142
-
编码器在机器人技术中的应用 编码器在传感器系统中的作用2024-11-24 3032
-
MT6701绝对式磁编码器优化机器人关节伺服控制2025-08-04 1372
-
集成多摩川磁性编码器的伺服电机与机器人关节设计创新2025-08-28 1068
-
基于MT6816单芯片磁编码的机器人关节模组一体化设计2025-08-27 1404
-
昆泰芯高速磁编码器实现机器人关节双端测量2025-09-25 2399
-
高性能人形机器人关节模组选型的关键技术要素2025-11-19 2485
-
具身智能核心执行器:人形机器人关节模组核心技术与工程化落地2026-05-18 1146
全部0条评论

快来发表一下你的评论吧 !
