

h桥驱动电路使电机正反转原理
描述
H桥驱动电路使电机正反转的原理是一个在电子和电机控制领域广泛应用的基础知识。
一、H桥驱动电路概述
H桥驱动电路是一种用于控制直流电机正反转及速度的电路,其名称来源于其电路结构类似于字母“H”。该电路通常由四个开关元件(如晶体管、MOSFET等)组成,这些开关元件被配置成可以控制电机两端电流的方向,从而实现电机的正反转。
二、H桥电路的基本结构
H桥电路的基本结构包含四个开关元件,通常标记为Q1、Q2、Q3和Q4,它们围绕电机两侧配置,形成两个“桥臂”。电机则连接在这两个桥臂之间,成为“桥”的横杠。具体结构如下:
- 桥臂1 :由Q1和Q2组成,连接电机的一端与电源的正负极。
- 桥臂2 :由Q3和Q4组成,连接电机的另一端与电源的正负极。
此外,为了保护电路中的开关元件免受电机反电动势的影响,通常还会在每个开关元件旁边并联一个续流二极管(如D1、D2、D3、D4)。
由于电动阀的线圈呈现感性。当正向或者反向驱动信号断开时,流过线圈的电流不能突变。
在线圈两端会产生与驱动信号反相的反向电动势。
一般的做法是在阀门的线圈两端并联双向TVS,或者两个反向串联稳压二极管。
在正反两个方向吸收瞬时大脉冲功率,并把反向电动势钳位到一定的电压。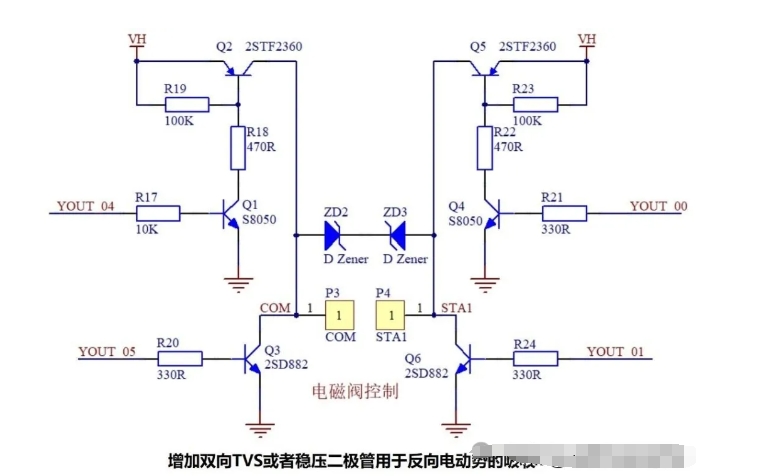
双向TVS或者反向串联稳压二极管吸收反向电动势
还有一种办法是通过并联在上下桥臂驱动管两端的二极管构成续流通路,以降低反向电动势的幅度。
如果驱动管为MOS管,则内部体寄生二极管可用于提供续流通路。
YOUT_04, YOUT_01驱动高电平,YOUT_00, YOUT_05输出低电平。
Q1,Q6导通,电流的流向为,
VH->Q1的E极->Q1的C极->阀门线圈->Q6的C极->Q6的E极->参考地。
在电流的驱动下,阀门被打开。
正向输出的的电流流向
断开驱动信号时,下桥臂YOUT_01首先输出低电平,关断下桥臂。
延时一段时间,大概50ms之后,上桥臂YOUT_04再输出低电平,关断上桥臂。
在这段延时时间内,流过阀门线圈的电流并不会立即切断,而是形成了
VH->Q1的E极->Q1的C极->阀门线圈->二极管D8->VH的续流通路。
三、H桥驱动电机正反转的原理
1. 正转模式
当需要电机正向转动时,控制信号使Q1和Q4导通(即闭合),同时Q2和Q3断开(即打开)。此时,电流从电源的正极经过Q1流向电机的一端,再从电机的另一端经过Q4流回电源的负极,形成正向电流。根据安培定则(即电流在磁场中受力的方向与电流方向和磁场方向都垂直,且满足左手定则),电机内部的磁场与电流方向相同,从而驱动电机按照预定的方向旋转。
2. 反转模式
当需要电机反向转动时,控制信号使Q2和Q3导通,同时Q1和Q4断开。此时,电流从电源的正极经过Q2流向电机的另一端,再从电机的一端经过Q3流回电源的负极,形成反向电流。同样根据安培定则,电机内部的磁场与电流方向相反,从而驱动电机反向旋转。
四、H桥电路的调速与制动
1. 调速
H桥电路还可以通过调整开关元件的通断时间(即占空比)来实现电机的调速。这通常通过脉宽调制(PWM)信号来实现。PWM信号是一种在固定周期内改变高电平持续时间的信号,其占空比(即高电平时间占总周期的比例)决定了平均电压的大小。当PWM信号控制H桥电路时,通过改变PWM信号的占空比可以改变电机两端的平均电压,进而改变电机的转速。占空比越大,平均电压越高,电机转速越快;占空比越小,平均电压越低,电机转速越慢。
2. 制动
当需要电机快速停止时,可以通过关闭所有开关元件(即Q1、Q2、Q3和Q4都断开)来切断电机两端的电流。此时,电机内部的磁场迅速消失,电机将迅速停止转动。另外,也可以通过使对角线上的两个开关元件(如Q1和Q3或Q2和Q4)同时导通,将电机两端短路,形成电机制动状态,使电机迅速停止转动。这种制动方式称为动态制动或回馈制动。
五、H桥电路的特点与应用
1. 特点
- 双向控制 :H桥电路能够控制电机电流的方向,从而实现电机的正反转。
- 调速方便 :通过PWM信号控制开关元件的通断时间,可以方便地实现电机的调速。
- 制动灵活 :支持多种制动方式,包括自由停车、动态制动等。
- 保护电路 :通过并联续流二极管等元件,可以保护电路中的开关元件免受电机反电动势的影响。
2. 应用
H桥驱动电路广泛应用于需要控制直流电机正反转及速度的场合,如机器人、汽车、飞行器等领域。在机器人技术中,H桥电路常用于控制机器人的关节运动;在汽车领域,H桥电路可用于控制电动汽车的驱动电机;在飞行器中,H桥电路则可用于控制螺旋桨的旋转方向和速度。
六、结论
H桥驱动电路是一种简单而有效的电路,它通过控制电机两端电流的方向来实现电机的正反转及调速。该电路具有双向控制、调速方便、制动灵活等特点,并广泛应用于各种需要控制直流电机运动的场合。随着电子技术的不断发展,H桥驱动电路的性能也将不断提升,为电机控制领域带来更多的便利和创新。
-
直流电机正反转控制电路的工作原理2023-03-27 20385
-
H桥驱动电机正反转2013-06-18 12118
-
H桥驱动小功率直流电机的正反转2021-06-28 1677
-
MS管搭建的H桥电路如何去实现电机的正反转控制2021-09-03 2860
-
Proteus仿真H桥是怎样控制电机正反转的2021-10-14 2931
-
h桥电路控制电机正反转能用差分分电路代替吗?2023-04-25 1219
-
H桥式电机正反转换控制电路图2011-05-16 20962
-
电机驱动两路全桥正反转测试(常规)2016-01-12 1121
-
直流电机正反转驱动电路2017-01-14 4213
-
2路直流电机驱动模块正反转PWM调速+双H桥步进电机迷你电机驱动2017-07-21 4998
-
浅谈基于H桥电路的控制电机的正反转和PWM调速2018-10-16 19299
-
用PMOS跟NMOS做H桥控制直流电机的正反转2022-11-11 10330
-
H桥驱动电路用什么芯片2024-05-11 6234
-
H桥电机驱动电路电路图 H桥电机驱动电路的工作原理和控制方式2024-06-21 20206
-
双通道H桥驱动并且每个H桥可提供4.0A电流的电流控制电机驱动器2025-09-03 1291
全部0条评论

快来发表一下你的评论吧 !
