
资料下载


×
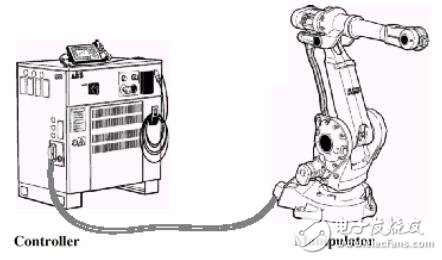
S4C IRB机器人基本操作
消耗积分:0 |
格式:rar |
大小:1.25 MB |
2017-10-16
分享资料个
MOTION TYPE:选择操作机器人的方式是沿TCP旋转还是线性移动TCP,手动状态下,直线运动与姿态运动切换。直线运动指机器人TCP沿坐标系X、Y、Z轴作直线运动,姿态运动指机器人TCP在坐标系空间位置不变,机器人六根转轴联动改变姿态。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





