

思岚科技全场景机器人底盘Apollo2.0的特性
描述
机器人底盘是机器人系统中至关重要的组成部分,它承载着机器人移动、导航、避障等基础功能。同时,也给了机器人应用延伸的“平台”,进一步推动行业的发展。
在应对多样且复杂的行业应用场景时,用户对于机器人底盘的期待无疑是多方面的:高度的环境适应性、精准的定位、导航、避障能力、便捷的开发和集成、安全的产品应用……
思岚科技从2015年推出首款ZEUS机器人底盘以来,一直致力于解决用户场景落地中实际遇到的难题。今天,思岚科技带来全新的“灵巧型、全场景、通用型”机器人底盘 — Apollo2.0。通过全新的技术创新和革命性的导航系统,为机器人开发和应用带来一款“好用”的机器人底盘,真正为用户做到降本增效。
高度的环境适应性
双雷达配置
全方位感知,卓越的导航避障能力
Apollo2.0 配备主雷达和低矮物检测雷达,双雷达的设置,可以精准应对静动态障碍物、低矮障碍物,使Apollo 2.0能够全方位感知周围环境,有效避免碰撞和障碍物干扰。
配备工业安全触边,以及车规级超声波、防跌落、深度摄像头等多种传感器,确保在各种复杂环境中稳定运行,实现0误触发率。
Apollo2.0 圆形外观,对于空间的利用度更高,在复杂环境中的移动更灵活。
高精度定位与导航
全场景细节尽在掌握
Apollo 2.0采用全新的SLAMWARE 3.0自主定位导航系统,结合多传感器融合数据,实现厘米级别的高精度定位和导航。
采用SharpEdgeTM精细化构图技术,构建高精度、厘米级别地图,超高分辨率,不存在误差累加。
无论是复杂的室内环境还是多变的室外场景,Apollo 2.0都能迅速适应,确保机器人精准地执行任务。
提升工作效能
多机调度与协同
有效提升运营效率
Apollo2.0支持多机调度功能(LORA),允许多个机器人之间进行高效的数据传输和协同工作,提升整体运营效率。
适用于仓储物流、酒店多区域配送等需要多机器人协同工作的场景,大大提高整体运营效率,减少人力成本。
多种导航模式
行走自如,直线超车
Apollo 2.0配备了带方向的轨道模式和轨道优先模式。特别是在工业场景中,帮助机器人高效完成任务。
同时支持反光板精准对接,精度误差:±1.5cm,角度误差:±3°,实现高精度定位,方便机器人在工业场景里实现精准对接。同时支持滚动式行驶日志存储(黑匣子),方便用户查看,多一层安全保障。
卓越的性能,高效的开发
卓越的越障、续航能力
双排工业脚轮,标配磷酸铁锂电池
双排工业脚轮,任意方向,运行更稳定
爬坡越障能力更强
2cm垂直过坎
6cm水平沟壑过坎
整机10°爬坡
标配磷酸铁锂电池
30Ah电池容量
满载运行14h
2000次满充满放循环
更大倍率放电
稳定安全、大容量、长续航、寿命久
支持快充、线充模式
有效提升机器人底盘工作效率
安全易开发
IP54防护等级,集成度高
Apollo2.0具备IP54防护等级,防水防尘;封闭式底部设计,异物入侵难,可以保护关键元器件。同时优化了机身用材、线材插件等硬件,空气放电15KV,可以在工业苛刻场景、恶劣环境中应用,使用更安全。
兼容市面上底盘安装孔位,集成度高。有效降低开发难度,缩短研发周期。
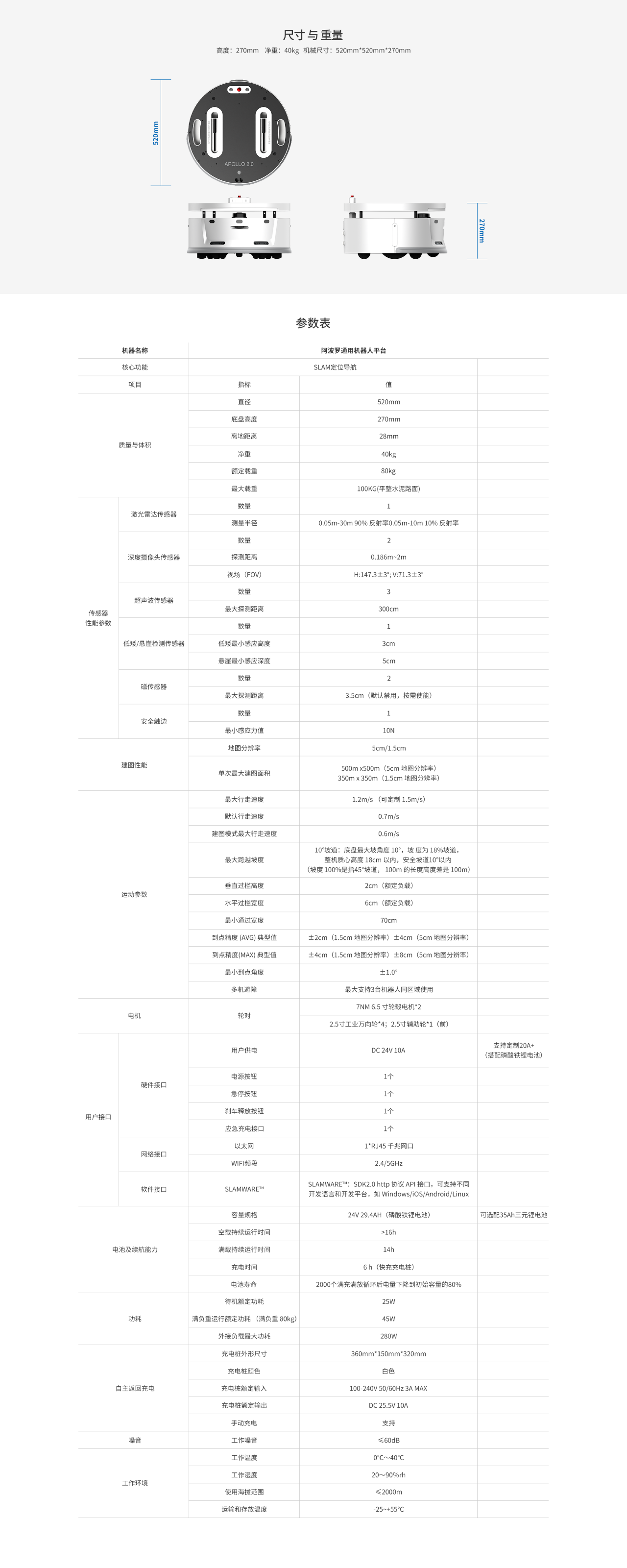
参数一览,适配多场景
-
履带机器人 金属底盘2012-08-14 73115
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8365
-
机器人底盘传感器位置坐标及底盘配置工具的使用2019-01-24 5060
-
浅析导航底盘如何解决服务机器人室内自主移动难题2021-01-07 31888
-
如何搭建实体机器人ros底盘2022-01-20 2416
-
机器人底盘的主要三大技术2019-02-02 9095
-
摆脱人为控制 思岚Apollo移动底盘助力机器人智能行走2019-08-12 2713
-
思岚科技高性价比机器人底盘产品将主导未来市场2020-05-16 3239
-
ZEUS机器人的底盘技术和应用案例2020-08-26 1782
-
思岚科技:让机器人会看会走2020-11-11 2864
-
思岚科技携机器人自主定位导航解决方案亮相GAIE2021-05-23 2896
-
思岚科技荣获Leaderobot中国商用机器人最佳场景奖2022-07-15 2670
-
思岚科技智能机器人亮相CHCC20222022-07-27 1280
-
思岚全自研Apollo底盘的零售盘点机器人Diana得到客户的高度认可2022-09-19 1107
-
思岚科技推出新一代圆形通用机器人底盘Apollo2.02024-09-13 2010
全部0条评论

快来发表一下你的评论吧 !
