

思岚科技SLAMKit定位与建图解决方案介绍
描述
2023年11月,面对客户高效稳定的定位和建图需求,思岚科技以业界创新的产品形态提供了SLAMKit定位和建图解决方案,以软件授权的方式嵌入运行在机器人的主控器中,并为机器人提供环境建模与自主定位的能力。
SLAMKit 主要由三个部分组成,分别是:思岚激光雷达、授权盒和授权软件程序。致力于为用户提供行业内首个导航系统软件授权化服务,让产品多快好省,让方案多场景契合。
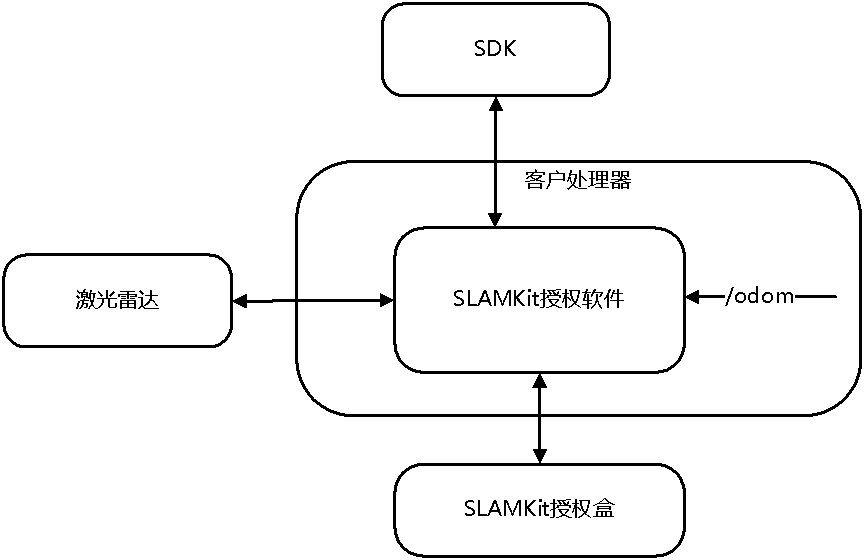
SLAMKit 的核心为授权软件部分,其系统框图如下所示,输入为激光雷达数据、授权盒传感数据、以及里程计数据,其中激光雷达数据和授权盒传感数据为授权软件独立驱动获取,里程计数据来自于客户侧的 ROS 节点。系统的输出可被定义为上层可供二次开发的工具链,包括可视化交互工具 Robostudio、C++ sdk、JAVA sdk、Restful API sdk、ROS sdk 等。
SLAMKit定位与建图解决方案核心优势
定位
建图
工具链
1. 大场景高分辨率地图构建
2. 思岚自研SharpEdge 地图优化技术
3. 高精度实时定位
4. 多变场景鲁棒性定位
5. 可视化工具与SDK完整工具链支撑
6. 产品全生命周期的支持服务
大场景高分辨率地图构建
1.5cm*1.5cm/pixel
最高地图分辨率
150m*150m(开发者版)
500m*500m(专业版)
思岚自研SharpEdge 地图优化技术
SharpEdge图优化建图模式,完美勾勒地图细节。细节光滑,无需二次修饰,客户可直接应用。
多变场景鲁棒性定位
动态多变,相速度高及局部特征贫瘠场景下能够实现稳定运行。
可视化工具与SDK完整工具链支撑
提供C++、Java SDK、ROS、Restful API 等SDK工具包,助力客户快速进行二次开发。提供官网交互软件RoboStudio,提供离线建图、地图编辑、地图拼接等功能。
产品全生命周期的支持服务
可以通过软件授权的方式为客户提供开发、部署和运维服务,完成全生命周期的支持服务。
目前,SLAMKit已在全球渠道上线,可免费获取【开发者版本】试用。值得一提的是,SLAMKit 所提供的授权盒可以作为软件授权方案的授权钥匙,也可以独立作为一个 IMU 模块使用。当授权盒作为独立 IMU 模块使用时,为客户提供持续稳定的九轴传感信号输出,同时体验一把高性能定位建图方案试用。
ROS九轴IMU模块
ROS兼容
双IMU
高精度定位
1. 高精度稳定数据输出
2. 防零飘算法实现稳定yaw角输出
3. 内置双IMU与滤波处理算法
4. 原生USB数据输出接口
ROS兼容与IMU数据可视化
SLAMKit授权盒作为IMU使用时,可读取三轴加速度、三轴陀螺仪、三轴磁力计、三维欧拉角、四元数、去零飘航向角数据,帮助设备获取更稳定、更准确的定位信息。同时200Hz高速多元数据输出。
商用标准的结构与硬件设计
防尘金属外观,商用标准的结构与硬件设计,确保IMU模块高效、稳定地服务于商业应用环境。
原生 USB 接口的高精度IMU模块
内置了高精度的IMU模块,配备原生USB接口,无需外接设备,方便将它与各种计算平台相连,从而实时获取和分析运动数据。
200Hz高速多元数据输出
支持IMU200Hz高频输出定位和姿态数据,具有优秀的定位精度。
SLAMKit&IMU模块参数
SLAMKit定位与建图解决方案
SLAMKit 定位与建图解决方案分为来发者版和专业版两种,它们之间的对比如下:
| 建图面积 | 开发者版 | 专业版 |
| 150m*150m |
500m*500m (可根据需求和硬件条件进一步扩大) |
|
| 使用时间 | 1.5h循环试用 | 不限时 |
| 升级服务 | 无升级服务 | 功能持续迭代 |
| 专业版SLAMKit性能参数 | |
| 最大建图面积 | 500000㎡ ~ 1200000㎡ |
| 地图分辨率 | 1cm、2.5cm、5cm可选 |
|
实时定位误差 (典型值) |
± 5mm,± 1° |
| 定位稳定性 | 50%以上地图环境变化率仍可稳定工作 |
| 最大观测距离 | 50m(典型值,具体视雷达选型决定) |
| 扫描频率 | 10 ~ 20Hz |
| 定位输出频率 | 20 ~ 100Hz |
ROS九轴IMU模块数据
| ROS九轴IMU | |
| 基本参数 | 参数数据 |
| 通讯方式 | 原生USB接口、USB通信协议 |
| 输出内容 | 片上时间、3轴加速度、3轴角速度、3轴磁力计,3维欧拉角、四元数,高精度yaw角,模块静止状态等 |
| 输出速率 | 200Hz |
| 启动时间 | 10000ms(包含上电自检) |
| 工作温度 | -40°C~+85°C |
| 储存温度 | -40°C~+100°C |
| 支持设备 | Intel 或 arm 工控机 + ubuntu 16.04、18.04、20.04和22.04 |
| 工作电压 | 5V |
| 工作电流 | 12mA |
| 休眠电流 | 20uA |
| 产品尺寸 | 70.8mm * 63.4mm * 25.2mm |
| 开发工具 | C++ SDK,ROS node |
| 参数 | 条件 | 典型值 | |
| 加速度计 | 量程 | / | ±2g |
| 灵敏度 | / | 16384 LSB/g | |
| 初始零偏误差 | Board-level,三轴 | ±50mg | |
| 温漂误差 | 0°C~+85°C | ±0.80mg/°C | |
| 噪声谱密度 | 噪声带宽 = 10Hz | 230µg/√Hz | |
| 正交误差 | / | ±2% | |
| 陀螺仪 | 量程 | / | ±2000°/s |
| 灵敏度 | / | 16.4 LSB/(°/s) | |
| 初始零偏误差 |
Component-level, 25°C |
±5°/s | |
| 温漂误差 | -40°C~+85°C | ±0.05(°/s)/°C | |
| 噪声谱密度 | 噪声带宽 = 10Hz | 0.015(°/s)/√Hz | |
| 正交误差 | / | ±2% | |
| 磁力计 | 量程 | / | ±4900 µT |
| 灵敏度 | / | 0.15 µT / LSB | |
| 初始校准误差 | / | -2000 ~ 2000 LSB | |
|
俯仰角、 横滚角 |
量程 | / | X:±180° Y:±90° |
| 航向角 | 量程 | / | Z:±180° |
| 零飘 | 水平放置 | <0.01°/hr | |
-
关于机器人定位与建图,这些小技巧你懂吗2018-03-28 4554
-
思岚科技携机器人自主定位导航解决方案亮相GAIE2021-05-23 2974
-
思岚科技|基于机器人自主定位解决方案上的AI“元宇宙”2023-06-07 900
-
slamware自主定位导航解决方案赋能机器人智能移动2023-10-11 2684
-
思岚推出搭载全新的SLAM自主定位导航系统及激光视觉多重导航方案2023-10-13 2385
-
思岚科技推出SLAMKit高性能定位和建图解决方案2023-11-22 1630
-
SLAMWARE ROS SDK的基础架构、部署方法和应用示例介绍2024-03-21 2540
全部0条评论

快来发表一下你的评论吧 !
