

基于DPU的容器冷启动加速解决方案
描述
1. 方案背景
1.1. 业务背景
随着容器技术的迅猛发展与广泛应用,一种新的云计算服务模式应运而生-函数即服务(FaaS, Function as a Service)。FaaS作为一种无服务器(Serverless)计算方式,极大地简化了开发人员的工作,使他们能够专注于应用的构建与运行,而不再需要承担服务器管理的负担。
然而,FaaS模式也并非没有缺陷,其中最为人诟病的便是“冷启动”问题。所谓冷启动,是指当请求被调度到某个函数实例时,如果该实例在上次执行完代码后已经被回收,系统需要先创建一个新的实例并初始化环境,才能继续执行代码。
相比之下,热启动则是指函数实例未被回收的情况下,直接复用现有实例以响应请求,这显然效率更高。因此,冷启动过程常常导致较高的延迟,进而影响应用的性能。
1.2. 问题与挑战
1.2.1 传统方案
根据《Slacker: Fast Distribution with Lazy Docker Containers》一文的分析,镜像拉取过程占据了容器启动时间的76%,然而实际启动时只有6.4%的数据会被读取。这一现象揭示了传统容器镜像格式和拉取方式在使用overlay文件系统(OverlayFS)时存在的问题:
过多的时间花费在拉取镜像上。
拉取了过多无关的数据。
这两个问题的根源在于容器镜像是由一组tgz文件组成,而这些文件作为镜像层(image layer)存在以下两个显著缺点:
提取单个文件时,需要扫描整个layer。
同一层多个文件的提取不支持并行处理。
因此,使用OverlayFS的容器在启动前必须完成所有tgz文件的拉取和解压,这无疑增加了启动时间。
针对这些问题,社区已经提出了一些改进措施,具有代表性的两个解决方案是Stargz和DADI。
1.2.2 已有的改进方案
Stargz 是一种容器镜像加速技术,它采用了 Google的CRFS(Container Registry Filesystem)来重新组织容器镜像,以便实现更快的容器启动和更高效的文件检索。CRFS是一个只读的用户态文件系统,它使用了新的文件格式,使得镜像层内的文件可以被随机访问(seekable)。
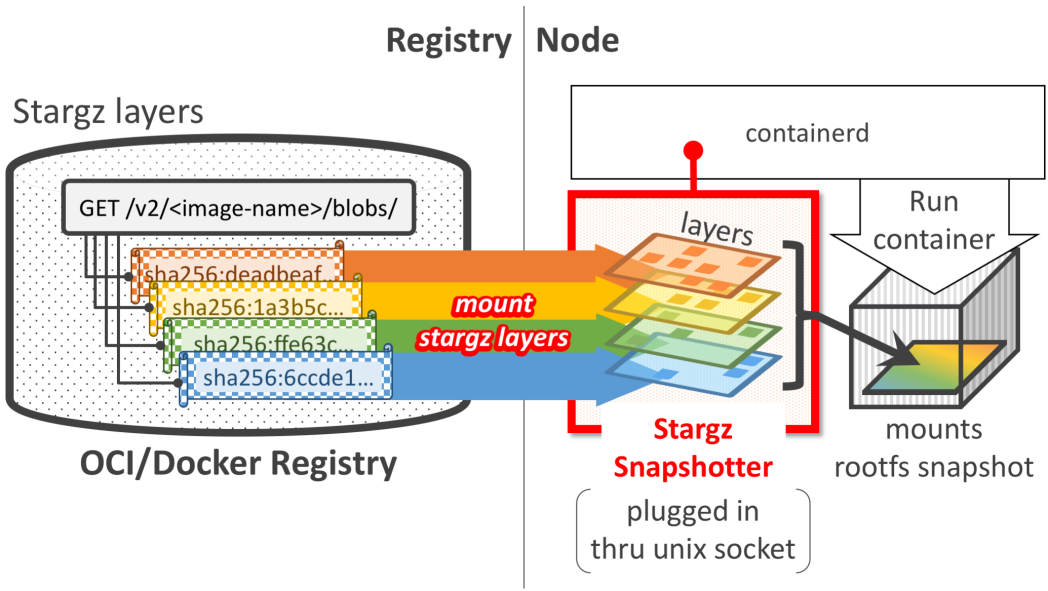
stargz架构图
使用Stargz启动容器时,无需拉取所有层到本地,而是远程挂载每一层到本地目录组成rootfs,从而实现容器的快速启动。容器启动之后的数据访问则是利用FUSE(用户态文件系统)按需获取。
DADI(Data Accelerator for Disaggregated Infrastructure)是阿里云针对容器加速的解决方案,DADI 的核心组件是 Overlaybd,这是一种基于块设备的镜像格式,提供了在block-based layer之上的一个合并视图,然后通过TCMU在Host上产生一个SCSI设备作为rootfs。TCMU(Target Core Module In Userspace),是scsi target的用户态实现,用于生成一个容器 rootfs 的 SCSI 设备。
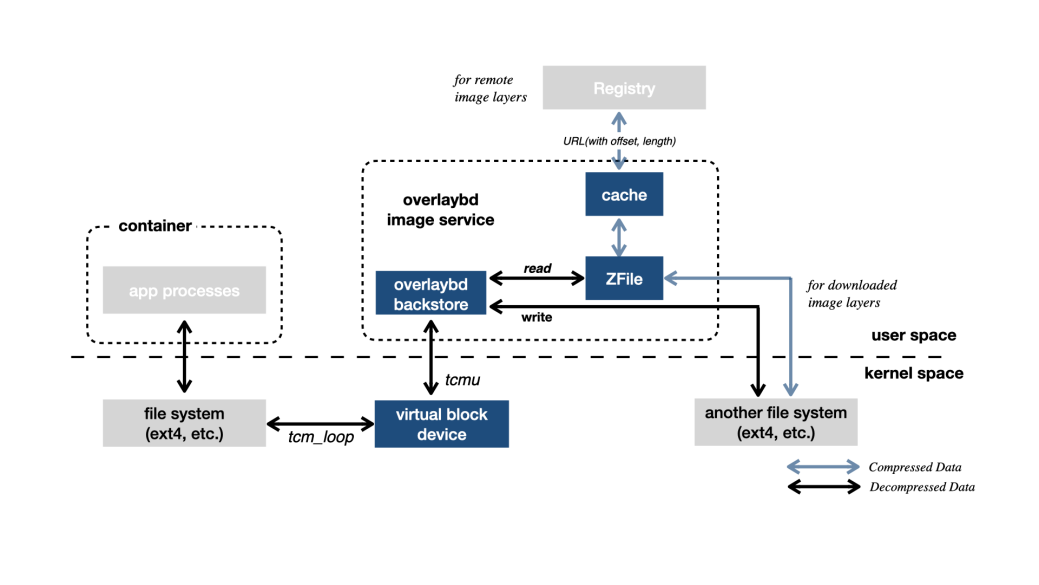
DADI架构图
使用DADI启动一个容器时,其也不用拉取所有层到本地,只是基于所有层块设备创建一个scsi device表示rootfs,实现容器的快速启动。容器启动之后的数据访问则是由tcmu按需获取,并且加入了本地缓存和ZFile加速数据的读取。
1.2.3 问题总结
综上所述,以上方案在实际应用中仍然存在以下问题:
传统OverlayFS容器的冷启动时间较长,这可能会对性能敏感的应用造成影响,导致较差的用户体验。
改进方案中的用户态文件系统需要占用一定的主机资源,这可能会对系统的整体性能产生影响。
2. 方案介绍
2.1. 整体架构
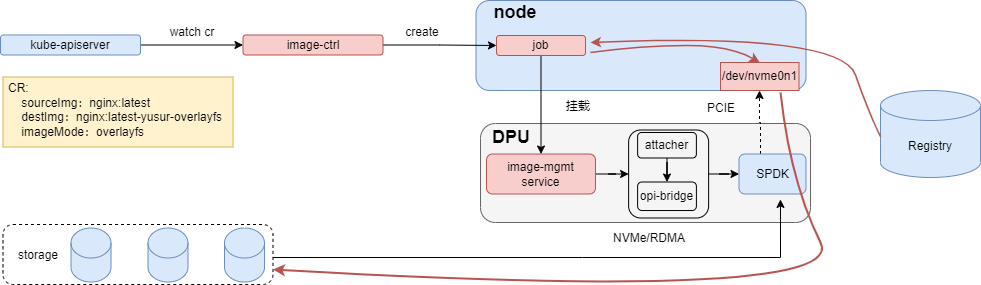
为了解决上述问题,我们构建了基于DPU的容器冷启动解决方案,以k8s为底座,以存储为核心,利用DPU的卸载和加速能力,使容器的冷启动更快,占用更少的host资源。整体架构如下所示:
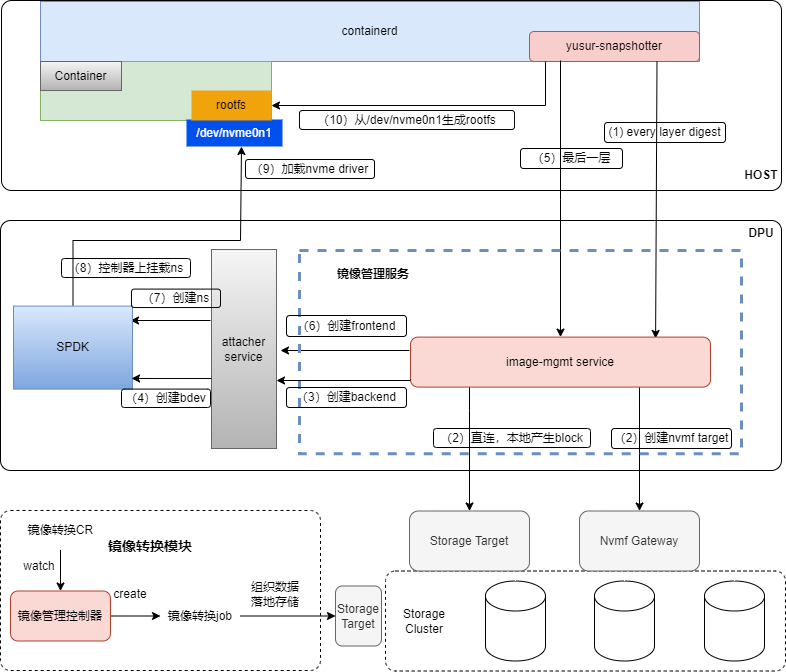
1-4):containerd会调用yusur-snapshotter准备rootfs每一层的内容快照,image-mgmt根据label参数连接存储,创建spdk bdev。
5-9):到最后一层时,需要创建NVMe subsystem/ctrl/ns,关联spdk bdev,此时在host侧给相应PCI绑定NVMe驱动,即可看到对应的NVMe disk。
10):yusur-snapshotter查到disk之后,按照不同的镜像格式生成容器启动的rootfs。
采用本方案启动容器时,首先DPU会通过NVMe/RDMA的方式连接远端存储,实现高效的数据传输,然后通过NVMe PCIE的方式直通给host,最后host基于这个直通的disk生成rootfs并启动容器。由于云盘原生支持按需读取的特性,本方案在容器启动过程中无需拉取镜像,从而显著加快容器的启动过程。
2.2. 方案描述
当使用本方案启动容器时,首先需要进行镜像转换,镜像转换的主要作用是将原始镜像按照 Lvol(逻辑卷)的方式落地到存储中,并将镜像元数据推送至镜像仓库,供容器启动时使用。
同时本方案在镜像转换时支持两种镜像格式yusur-overlayfs和yusur-overlaybd。yusur-overlayfs和原生的镜像格式一样,按照overlay的方式生成rootfs,主要用于兼容overlay的场景;yusur-overlaybd以块设备的方式作为rootfs,原生支持可写层和理论上性能较overlayfs好。
2.2.1. 镜像转换
镜像转换主要责任是基于SPDK snapshot机制把原生镜像按需转换成以上两种格式的镜像,镜像数据存到存储,元数据存到镜像仓库。镜像转换有两种工作模式:普通模式和DPU模式。在DPU模式下,能利用DPU的加速能力,可以显著加快镜像转换的速度。
普通模式的架构如下图所示,其组件主要包含image-ctrl,attacher service,opi-spdk-bridge和原生spdk。
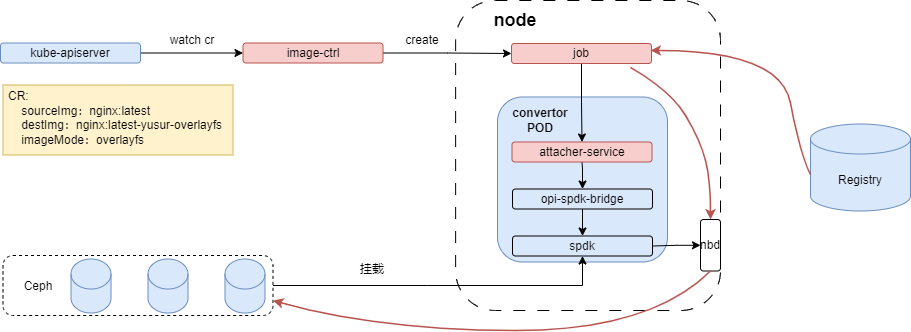
红色线条表示数据走向,job拉取原镜像层数据,按不同镜像格式写到nbd设备中。各个组件的作用如下:
Image-ctrl,镜像控制器:接收镜像转换yaml,创建转换job。job负责创建块存储,调用attach service创建和克隆lvol,完成镜像层数据写入lvol和推送转换后镜像元数据至仓库。
Attacher service:对opi-bridge操作的抽象,对上提供opi-bridge的能力
Opi-spdk-bridge:对接原生SPDK的opi-bridge,提供原生SPDK的基本操作
SPDK:原生SPDK提供快照,克隆的能力
DPU模式的架构如下图所示,其组件主要包含image-ctrl,image-mgmt,attacher ,opi-bridge和DPU spdk。
红色线条表示数据走向,job拉取原镜像层数据,按不同镜像格式写到NVMe disk中,各个组件的作用如下:
Opi-bridge:提供不通DPU的存储能力API
SPDK:不同DPU的SPDK 服务,提供NVMe disk的模拟功能
2.2.2. 镜像格式
使用两种镜像创建容器时,处理流程基本一致,差异在镜像数据的组织方式和rootfs的组成方式,yusur-overlayfs镜像格式如下所示。
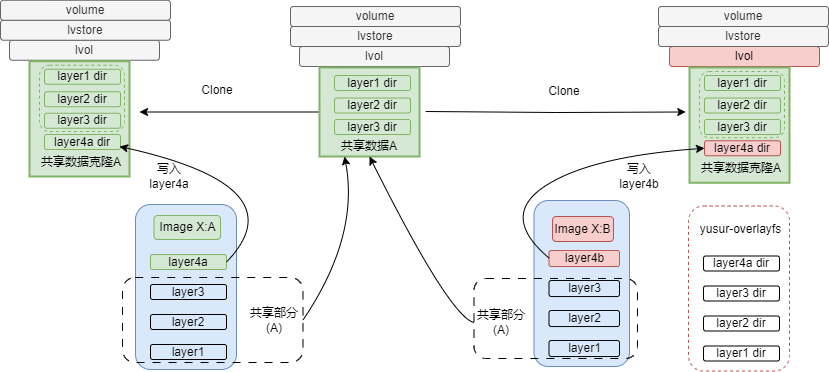
如上图所示,镜像X:A完成镜像转换之后,生成数据A,镜像X:B在转换时直接使用这部分数据,镜像X:B其他数据基于克隆的lvol写入。共享数据可以包含一个或多个lvol,它们之间也是通过clone链接在一起。
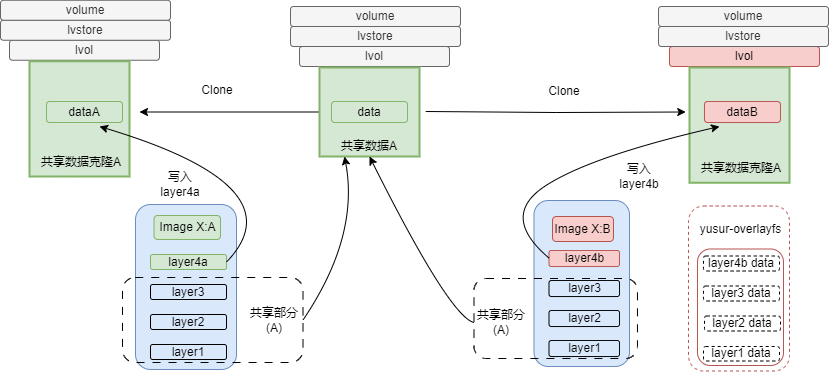
yusur-overlaybd的镜像格式如下图所示,与yusur-overlayfs镜像每层数据写到lvol不同目录的方式不同,yusur-overlaybd的镜像数据会直接写入lvol。
两种镜像格式的rootfs组成如下图所示。
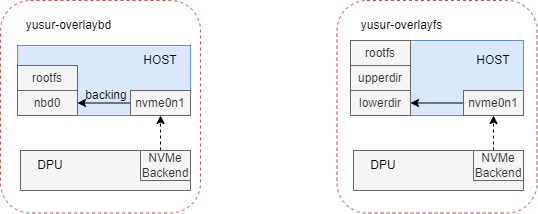
yusur-overlaybd以nbd设备作为rootfs,不用额外的可写层;而yusur-overlayfs是以块设备中的多个目录作为lowerdir,然后加一个可写层作为upperdir构成rootfs。
2.2.3. 容器启动
容器启动流程请参考”整体架构”章节。当用转换镜像启动容器时,containerd会根据镜像元数据生成一些labels,这些labels会作为参数传递给yusur-snapshotter,yusur-snapshotter会根据这些labels,创建不同的存储target。
目前支持两种形式的存储target,本地AIO和远程NVMe-OF,NVMe-OF同时又支持两种连接方式NVMe/TCP和NVMe/RDMA。在容器启动过程中主要涉及以下组件yusur-snapshotter,image-mgmt service和attacher service,作用如下:
Yusur-snapshotter:实现containerd的snapshotter接口,负责准备容器启动的rootfs
Image-mgmt service:和snapshotter交互,以AIO或NVMe-OF的方式创建和挂载块设备。
3. 方案测试结果
3.1. 功能测试
3.1.1. 镜像转换
创建镜像转换CR之后,控制器就会创建job进行镜像转换。以下是yusur-overlayfs和yusur-overlaybd转换成功的截图:

转换成功之后,会更新CR status,blocks会包含目的镜像对应存储的卷,多个卷之间是以clone的方式递进,以yusur-overlayfs为例,如下所示:
|
apiVersion: iaas.yusur.io/v1 kind: ImageConvertor metadata: name: nginx-latest-overlayfs namespace: image-mgmt spec: destImage: harbor.yusur.tech/cidg/img_test/nginx:latest-yusur-overlayfs imageMode: overlayfs sourceImage: harbor.yusur.tech/cidg/img_test/nginx:latest virtualSizeByGB: 100 status: blocks: - global-ba870cf5-6c3c-4cf6-95f3-d3963086b4e9 - local-e39cacaa-5c3e-4676-a014-d513a1ca0c09 - soldier-f64acdbb-4255-4999-81f8-652e1741120f imageMode: overlayfs ready: true |
转换成功之后,目的镜像会推送至镜像仓库,其作用是在容器启动时,提供存储相关的元数据,如下所示:
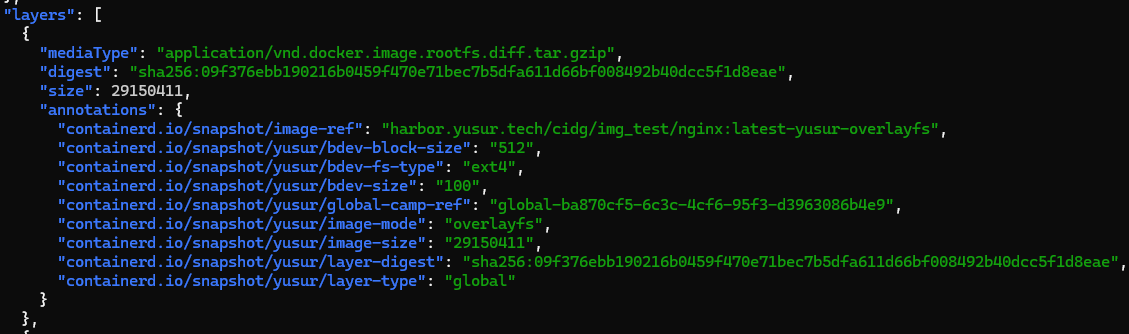
Annotation中包含该层所在的块设备,镜像格式,文件系统等信息,这些信息会作为labels传递给yusur-snapshotter。
3.1.2. Pod启动
pod启动之后,可以查看rootfs组成,如下所示:
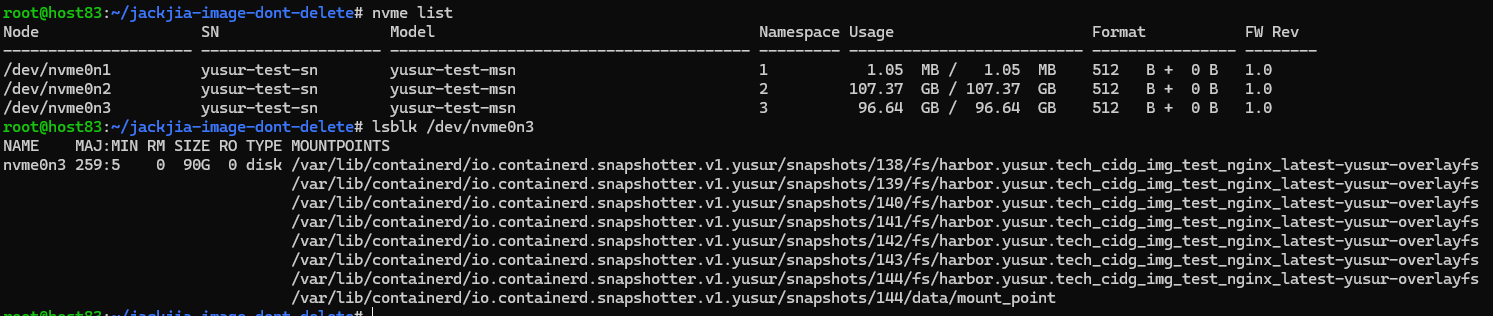
Yusur-overlayfs:

overlayfs格式的镜像,块设备中包含镜像的每一层数据,挂载后把相关层目录,bind到对应的snapshot,构成overlay的lowerdir。

Yusur-overlaybd:
overlaybd格式的镜像, 块设备中包含镜像的rootfs;没有把块设备直接作为容器启动的rootfs,考虑到还需要一个可写层,所以基于块设备创建一个qcow2的本地文件,然后本地文件通过nbd暴露出来,作为容器启动的rootfs和可写层。
3.2. 性能测试
性能测试包括5种方案,本方案提供了其中的两种yusur-overlayfs/NVMe/RDMA和yusur-overlaybd/NVMe/RDMA。yusur-overlayfs/NVMe/RDMA表示镜像格式是yusur-overlayfs,存储target是NVMe-OF,连接方式是RDMA;yusur-overlaybd/NVMe/RDMA同yusur-overlayfs,只是镜像格式不同。
3.2.1. Containerd下的容器启动耗时测试
我们将测试整个容器启动过程中的时间消耗,具体分为三个阶段:镜像拉取、容器创建和服务ready。
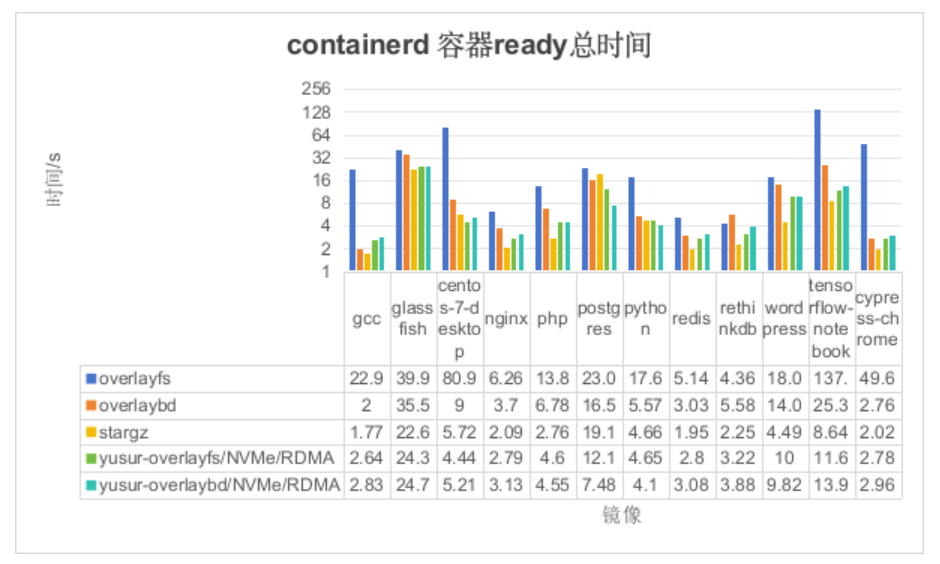
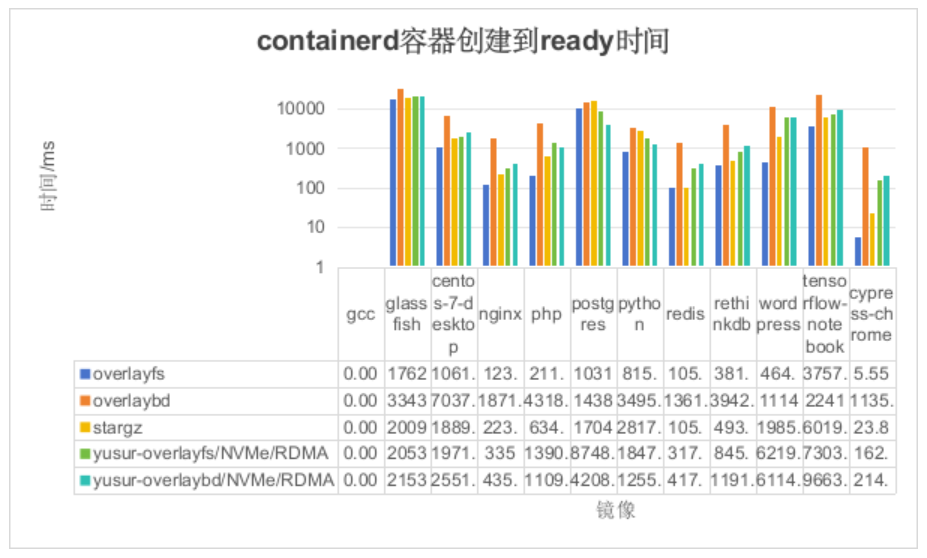
如上图所示,纵坐标表示容器ready时间(单位:秒),横坐标表示镜像名称。由于此场景只是去掉了k8s的影响,结论同2.2.1, 如下:
本方案的yusur-overlayfs较overlayfs有63%的性能提升,因为不用拉取所有数据到本地;
本方案的yusur-overlaybd较DADI overlaybd有34%的性能提升,是因为本方案io路径更短。
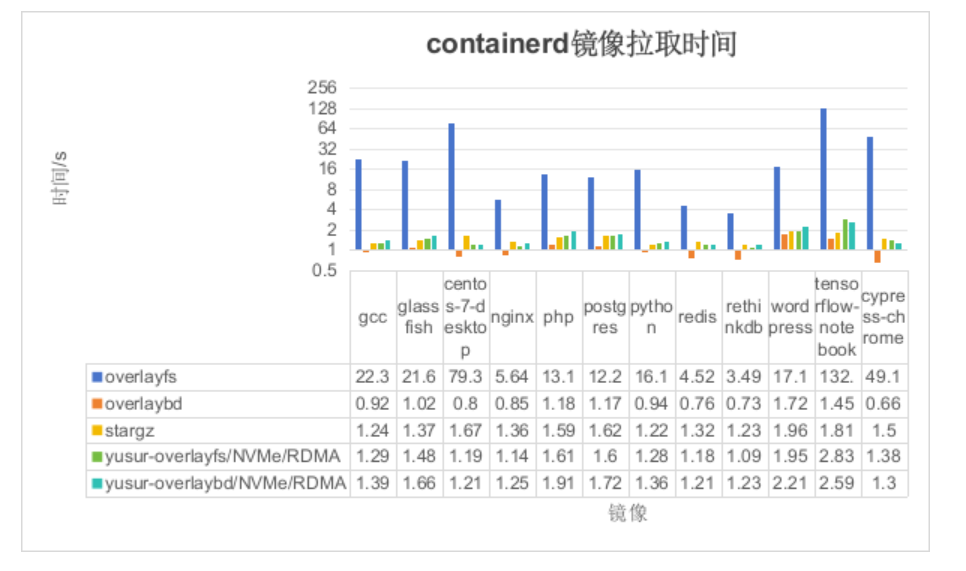
如上图所示,可以得出如下结论:
overlaybd镜像拉取是最快的,因为overlaybd在这个过程中只生成TCMU的config文件;
本方案的两种方法都较overlaybd慢,是因为本方案在镜像拉取中需要挂载云盘。
stargz也比overlaybd慢,是因为stargz在镜像拉取中需要挂载用户态文件系统
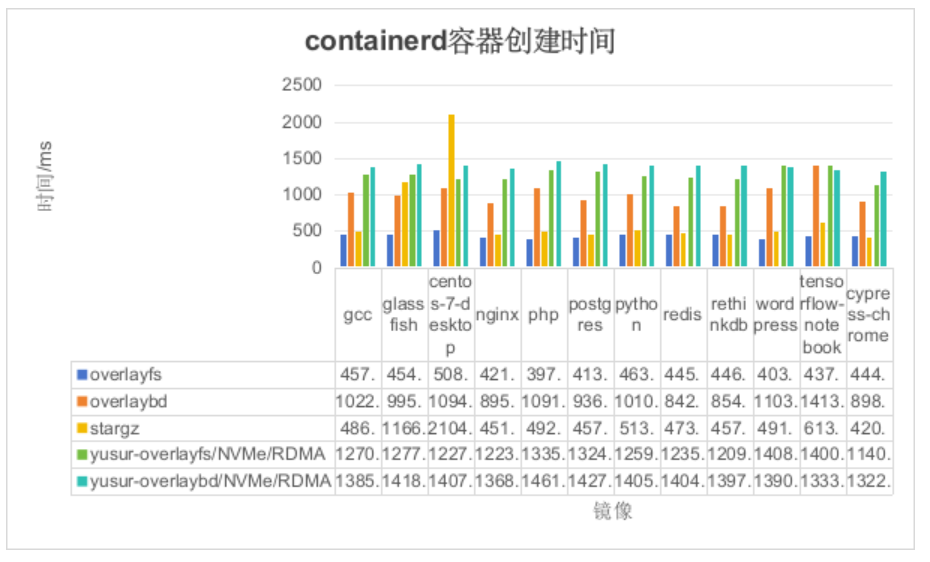
如上图所示,可以得出如下结论:
由于 OverlayFS 的数据已经在本地,因此 OverlayFS 的容器创建时间仅包括 runc 的操作以及启动命令的时间。
本方案的两种方法中,容器创建时间较高,因为本方案的 rootfs 基于 DPU 提供的云盘,yusur-snapshoter 需要创建 NVMe 系统(前端)并执行找盘操作。
stargz 在 CentOS 上消耗的时间较多,是因为 stargz 需要预加载(在这里需要预拉取 80M 的数据,主要时间消耗在这里)。
对于 overlaybd,由于其原理上与本方案基本相同,都是利用文件系统实现按需拉取,因此时间上基本差不多。
如上图所示,可以得出如下结论:
容器gcc消耗时间基本没有,是因为gcc启动命令只是执行了gcc --version,这个在容器创建时,已经就执行完了
OverlayFS 的耗时最短,因为在镜像拉取阶段,镜像数据已经被下载并存储在本地
Stargz由于前一过程预拉取了部分数据,所以总体时间上略高于OverlayFS。
本方案的 yusur-overlaybd 优于 overlaybd,主要是因为它在后期数据读取方面表现更佳。与 overlaybd 需要通过 TCMU 定位文件偏移量并使用 HTTP Range Request 向 registry 请求数据的方式不同,本方案直接通过内核 VFS,并采用 NVMe/RDMA 的方式进行数据传输,因而具有更低的延迟。
本方案的 yusur-overlayfs 相较于 stargz 和 overlayfs 表现稍逊,主要原因在于 overlayfs 的数据已存储在本地,而 stargz 在容器启动前已完成热点数据的预提取,而本方案则缺少数据预提取这一过程。
3.2.2. 镜像转换耗时测试
由于两种镜像格式相差不大,故采用 yusur-overlayfs 作为对比,测试结果如下所示:
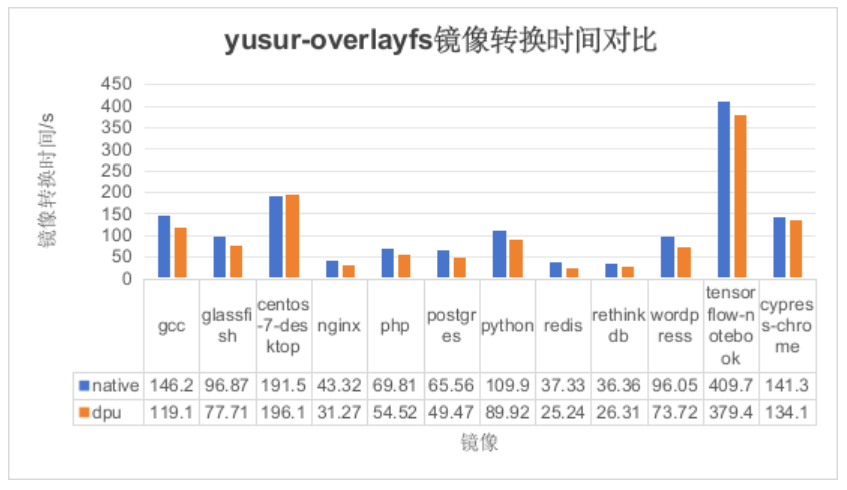
如上图所示,纵坐标表示不同模式下镜像转换时间(单位:秒),横坐标表示镜像名称。可以得出如下结论:
基于DPU的镜像转换方案可以降低镜像转换的时间,但是效果不是太明显。不明显的原因是受制于后端存储CEPH,导致RDMA发挥不出优势。
3.3. 资源消耗测试
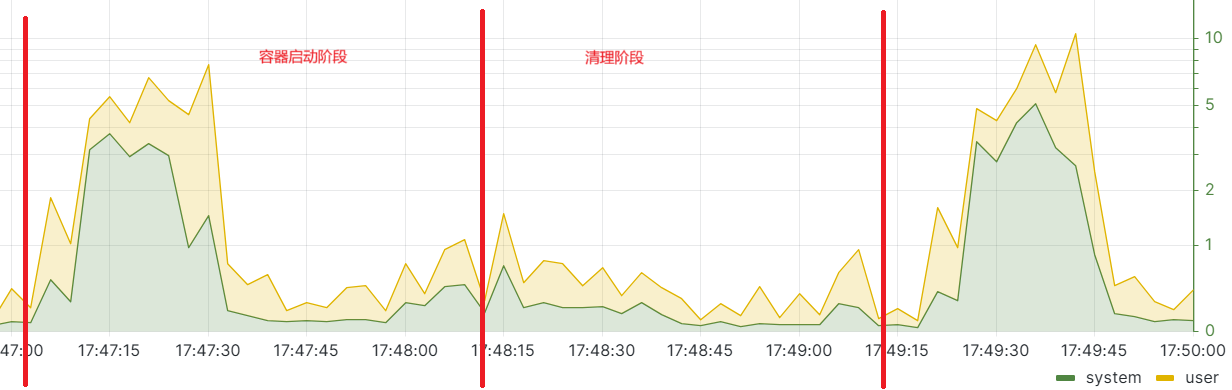
3.3.1. CPU消耗测试
stargz两次测试结果:如图所示,CPU最高使用率20.17%,平均使用率4.22%。

overlayfs两次测试结果:如图所示,CPU最高使用率14.77%,平均使用率2.78%。

overlaybd两次测试结果:如图所示,CPU最高使用率11.4%,平均使用率3.27%。

yusur-overlayfs两次测试结果:如图所示,CPU最高使用率7.66%,平均使用率1.95%。
yusur-overlaybd两次测试结果:如图所示,cpu最高使用率10.02%,平均使用率2.17%。

整体使用率较yusur-overlayfs高,从system使用率观察可以得出是nbd这一层导致的。
汇总结果如下:

从以上所有图片,得出如下结论:
本方案的最高CPU使用率最低;
本方案的cpu高利用率维持时间最短,只有30s左右。
3.3.2. 内存消耗测试
stargz两次测试结果:如图所示,最高内存使用7.67G,平均内存使用6.86G。

overlayfs两次测试结果:如图所示,最高内存使用5.71G,平均内存使用5.16G。

overlaybd两次测试结果:如图所示,最高内存使用5.21G,平均内存使用4.94G。

yusur-overlayfs两次测试结果:如图所示,最高内存使用5.28G,平均内存使用4.87G。

yusur-overlaybd两次测试结果:如图所示,最高内存使用5.62G,平均内存使用5.01G。

汇总结果如下:

从以上所有图片,得出如下结论:
本方案的消耗的内存最低;
本方案的内存高消耗维持时间最短,只有60s左右。
4. 总结
4.1. 测试结果总结
在 K8s 场景下,本方案的 yusur-overlayfs 相比于传统方案 overlayfs,性能提升了 57%;而相比改进方案 DADI,yusur-overlaybd 的性能也提升了 20%
在 Containerd 场景下,本方案的 yusur-overlayfs 相比传统方案 overlayfs,性能提升了 63%;而 yusur-overlaybd 相较于改进方案 DADI,性能也提升了 34%。
控制面和数据面下沉至 DPU,有效减少了主机资源的消耗。从测试结果来看,本方案的 CPU 和内存占用率以及持续时间均为最低。
从镜像cypress-chrome(624.2 MiB)、centos(1.3GiB)、tensorflow-notebook(1.7 GiB)的启动时间看,在本方案中,容器冷启动时间随着镜像大小的增加,其时间优势变得越加明显。
从镜像转换的测试结果来看,镜像越大,基于 DPU 的方案在时间上表现出越明显的优势,因为它能够利用 DPU 的 RDMA 能力。类推到容器启动过程中,所需的数据量越大,本方案的优势也会越加显著。
4.2. 方案价值
基于DPU的容器冷启动加速解决方案具有如下价值:
1、提升服务响应速度和用户体验:在FaaS中,由于函数实例是动态创建的,首次调用函数时可能会遇到冷启动延迟,即容器从停止状态到运行状态所需的时间。快速冷启动技术能够显著缩短这一时间,使得用户请求能够更快地得到响应,从而提升用户体验。
2、提高业务吞吐量:快速冷启动使得FaaS平台能够在短时间内启动更多的函数实例,以应对突发的流量高峰,从而提高业务的整体吞吐量。
3、提高系统可用性:在微服务架构和分布式系统中,服务的快速冷启动可以确保在服务实例故障时,能够迅速恢复服务,减少服务中断时间,提高系统的整体可用性。
4、提升资源利用效率:控制面和数据面下沉至 DPU,有效减少了主机资源的消耗,这意味着在实际应用场景中,将大大节省了宝贵的CPU和内存资源,让这些资源能够被应用服务更高效地利用。
综上所述,基于DPU的容器冷启动加速解决方案对于提升服务响应速度和用户体验、提高业务吞吐量、提高系统可用性、提升资源利用效率等方面都具有重要的价值和意义,随着云原生和无服务器计算的不断发展,该方案将具有广阔的应用前景。
本方案来自于中科驭数软件研发团队,团队核心由一群在云计算、数据中心架构、高性能计算领域深耕多年的业界资深架构师和技术专家组成,不仅拥有丰富的实战经验,还对行业趋势具备敏锐的洞察力,该团队致力于探索、设计、开发、推广可落地的高性能云计算解决方案,帮助最终客户加速数字化转型,提升业务效能,同时降低运营成本。
审核编辑 黄宇
-
《数据处理器:DPU编程入门》DPU计算入门书籍测评2023-12-24 2240
-
鸿蒙原生页面高性能解决方案上线OpenHarmony社区 助力打造高性能原生应用2025-01-02 571
-
请问STM32芯片怎样区分冷启动和热启动?2020-06-18 3969
-
什么是DPU?2023-11-03 1794
-
冷启动传感器开关特性测量系统2009-07-01 595
-
冷启动电子镇流器电路图2009-06-11 2018
-
单片机复位和冷启动详细介绍2018-02-12 21761
-
DOS的冷启动和热启动有什么区别和方法说明2019-08-14 2054
-
西门子PLC_CPU的冷启动、暖启动、热启动的区别2021-04-30 1211
-
STM32冷启动下载2021-12-20 778
-
在BlueField DPU上通过DOCA加速方案开发2022-04-14 2990
-
DPU技术解决方案的挑战和机遇2022-10-11 2926
-
西门子PLC的暖启动、冷启动、热启动有何区别2022-11-04 4067
-
华为云发布冷启动加速解决方案:助力Serverless计算速度提升90%+2023-01-19 1908
-
汽车电子应用中的冷启动2023-10-20 544
全部0条评论

快来发表一下你的评论吧 !
