

uln2003驱动步进电机原理,uln2003驱动步进电机程序
基准/监控/保护电路
描述
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。由于步进电动机能直接接受数字量的控制,所以特别适宜采用微机进行控制。
该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。
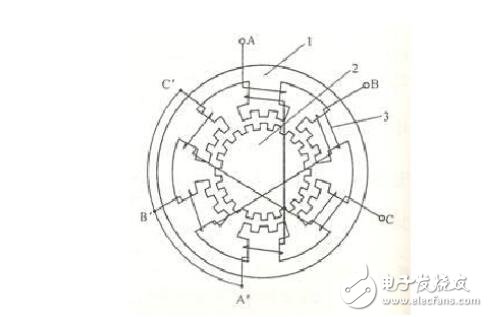
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
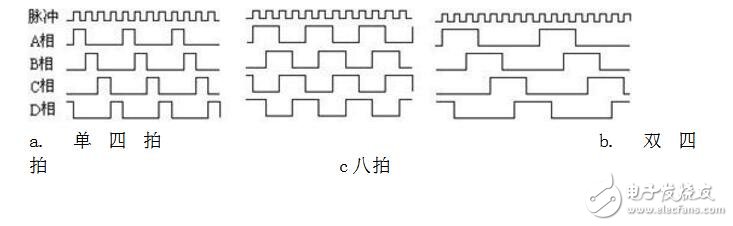
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:
uln2003驱动步进电机程序
#include《reg52.h》
//unsigned char IRCOM[]={0x00,0x00,0x00,0x00,0x10,0x10};
unsigned char zhuangtai=0;
unsigned char code F_Rotaion[4]={0x03,0x05,0x0d,0x09};
void delay(uchar delay){
uchar i;
for(delay;delay》0;delay--){
for(i=123;i》0;i--)
}
}
/*
void delay1(int ms)
{
uchar y;
while(ms--)
{
for(y=0;y《250;y++)
{
_nop_();
_nop_();
_nop_();
_nop_();
}
}
}
*/
void moto(){
unsigned char i;
for(i=0;i《4;i++){
P0=F_Rotaion[i];
delay(500);
}
}
void nmoto(){
unsigned char i;
for(i=3;i》=0;i--){
P0=F_Rotaion[i];
delay(500);
}
}
void stopmoto(){
P0=0x00;
}
void yunxing(){
if(zhuangtai==0){
stopmoto();
}
else if(zhuangtai==1){
moto();
}
else if(zhuangtai==2){
nmoto();
}
}
void jude(){
if(P3==0xef){
zhuangtai=0;
}
else if(P3==0xdf){
zhuangtai=1;
}
else if(P3==0xbf){
zhuangtai=2;
}
}
main(){
/*
IE=0x81;
TCON=0x01;
*/
P1=0x00;
P3=0xff;
jude();
yunxing();
}
/*void IR_IN()interrupt 0
{
uchar j,k,N=0;
EX0=0;
delay(15);
if(IRIN==1)
{
EX0 =1;
return;
}
while(!IRIN)
delay(1);
for(j=0;j《4;j++)
{
for(k=0;k《8;k++)
{
while(IRIN)
delay(1);
while(!IRIN)
delay(1);
while(IRIN)
{
delay(1);
N++;
if(N》=30)
{
EX0=1;
return;
}
}
IRCOM[j]=IRCOM[j]》》1;
if(N》=8)
IRCOM[j] = IRCOM[j] | 0x80;}
N=0;
}
if(IRCOM[2]!=~IRCOM[3])
{
EX0=1;
return;
}
if(IRCOM[0]!=0x00)
{
EX0=1;
return;
}
IRCOM[4]=IRCOM[2]&0x0F;
IRCOM[5]=IRCOM[2]》》4;
play();
beep();
EX0=1;
}
-
uln2003驱动直流电机程序2018-05-31 47454
-
基于STM32103和ULN2003的步进电机控制2023-03-01 6871
-
ULN2003步进电机驱动原理及应用程序步进电机驱动原理及应用2013-07-10 28684
-
ULN2003步进电机驱动电路2013-09-05 14613
-
请问怎样通过USART串口去调试ULN2003驱动步进电机?2021-06-30 1108
-
如何去使用ULN2003去驱动步进电机?2021-07-07 1269
-
使用uln2003模块驱动步进电机2021-08-31 1595
-
ULN2003驱动步进电机代码以及接线2021-09-15 1872
-
如何使用ULN2003芯片驱动步进电机?2021-10-18 4679
-
ULN2003驱动步进电机2016-09-01 2590
-
基于ULN2003及单片机驱动步进电机的应用案例2017-09-01 2376
-
一文看懂arduino驱动uln2003操作步进电机的方法2018-05-30 88118
-
ULN2003驱动步进电机的keil程序和电路图免费下载2020-05-25 2885
-
步进电机驱动板模块ULN2003芯片资料包2021-12-08 1717
-
基于定时器中断的ULN2003驱动器/步进电机驱动程序2023-03-16 1298
全部0条评论

快来发表一下你的评论吧 !
