

ULN2003如何驱动5V步进电机
基准/监控/保护电路
描述
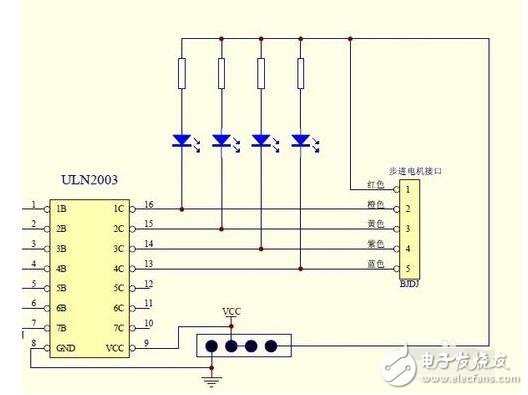
ULN2003是一个非门电路,包含7个单元,各二极管的正极分别接各达林顿管的集电极。用于感性负载时,该脚接负载电源正极,起续流作用(在感性负载中,电路断开后会产生很大的反电动势,为防止损坏达林顿管,接反相的二极管来构成通路,使之转换为电流)。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
ULN2003如何驱动5V步进电机
第一步进电机需要的驱动电流很大,因此直接使用单片机往往管脚电流不够,加上一般3.3V的单片机也无法驱动5V的步进电机,因此需要电路转换。用的ULN2003芯片驱动步进电机。ULN2003就是起到了电流放大作用,也使得驱动电压变成了5V。除了用ULN2003也可以自己用三极管搭建电路,原理与ULN2003内部结构类似。
也就是步进电机要运转时,如何给脉冲,让电机连续运动。ps:如果给错脉冲可能左转几下又转回来。下图就是小编电机的相序。
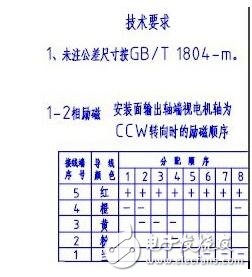
下面是正转翻转的编码 根据技术要求。如图用的单双八拍。
unsigned char F_Rotation[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09} ; //FAN
unsigned char B_Rotation[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08} ; //ZHENG
此函数两个参数,第一个参数是圈数。第二个参数是方向也就是选择正转和翻转
void motorNCircle(int n,bool position)
{
int i=0;
int j=0;
int k=0;
for(j=0;j《n;j++)
{
for(i=0;i《64*8;i++)
{
for(k=0;k《8;k++)
{
if(TRUE == position)
SetMotor(F_Rotation[k]);
else
SetMotor(B_Rotation[k]);
Delay(20000);
}
}
}
}
下面就是SetMotor函数,根据传的数据不同,控制的4个IO pin输出不同。
void SetMotor(unsigned char InputData)
{
if(InputData & 0x08)
{
GPIO_ResetBits(GPIOC, GPIO_Pin_6 );
}
else
{
GPIO_SetBits(GPIOC, GPIO_Pin_6);
}
if(InputData & 0x04)
{
GPIO_ResetBits(GPIOC, GPIO_Pin_7 );
}
else
{
GPIO_SetBits(GPIOC, GPIO_Pin_7);
}
if(InputData & 0x02)
{
GPIO_ResetBits(GPIOC, GPIO_Pin_8 );
}
else
{
GPIO_SetBits(GPIOC, GPIO_Pin_8);
}
if(InputData & 0x01)
{
GPIO_ResetBits(GPIOC, GPIO_Pin_9 );
}
else
{
GPIO_SetBits(GPIOC, GPIO_Pin_9);
}
}

以28BYJ-48为例,根据技术资料,步距的角度为5.625-64 而且带有减速齿轮是1:64 因此转64乘64个脉冲才是1圈。 因此一个脉冲转过5.625除64=0.08789度。
所以有了下面的循环。
for(j=0;j《n;j++)
{
for(i=0;i《64*8;i++) //64*8
{
for(k=0;k《8;k++) //4相单双8拍
{
if(TRUE == position)
SetMotor(F_Rotation[k]);
else
SetMotor(B_Rotation[k]);
Delay(20000); //注意这个延时自己去调节。
}
}
-
基于定时器中断的ULN2003驱动器/步进电机驱动程序2023-03-16 1298
-
步进电机驱动板模块ULN2003芯片资料包2021-12-08 1717
-
STM32F103单片机使用ULN2003驱动步进电机2021-11-18 3385
-
如何使用ULN2003芯片驱动步进电机?2021-10-18 4681
-
采用51驱动ULN2003的方法进行驱动2021-09-15 1845
-
5V步进电机马达+ ULN2003驱动板+Arduino2021-08-31 2215
-
STM32F103单片机使用ULN2003驱动步进电机 相关资料推荐2021-06-29 1521
-
一文看懂arduino驱动uln2003操作步进电机的方法2018-05-30 88118
-
uln2003继电器,怎么用ULN2003控制5V继电器2017-10-24 16902
-
基于ULN2003及单片机驱动步进电机的应用案例2017-09-01 2376
-
ULN2003驱动步进电机2016-09-01 2590
-
51单片机驱动ULN2003控制步进电机的方法2016-01-13 28360
全部0条评论

快来发表一下你的评论吧 !
