

合宙Air201资产定位模组LuatOS课程:远程控制
电子说
描述
很多小伙伴已经学习了前两期教程hello world、点灯,对合宙Air201这款低功耗资产定位模组的LuatOS开发已有一定了解,大家的实操反馈是:真的很简单!
那么,这一期我们要一起体验更有趣的——远程控制点灯!
Air201远程控制点灯教程
合宙Air201资产定位模组——是一个集成超低功耗4G通信、语音通话、超低功耗定位、计步、震动、Type-C、充电、放音、录音等功能的超小PCBA。
内部集成高效、简单、可靠的LuatOS语言,旨在帮助客户降低开发难度,降低研发成本,以及打造超小超低功耗的精品产品。
合宙Air201最新资料下载链接:
www.hezhoudingwei.com
本章节教你使用Air201远程控制示例,实现板载LED灯的亮灭。轻松拿捏操控感!
1. 搭建环境
新同学建议先看前期的相关基础知识,再看本期教程,更方便理解和上手。
1.1 建立远程服务
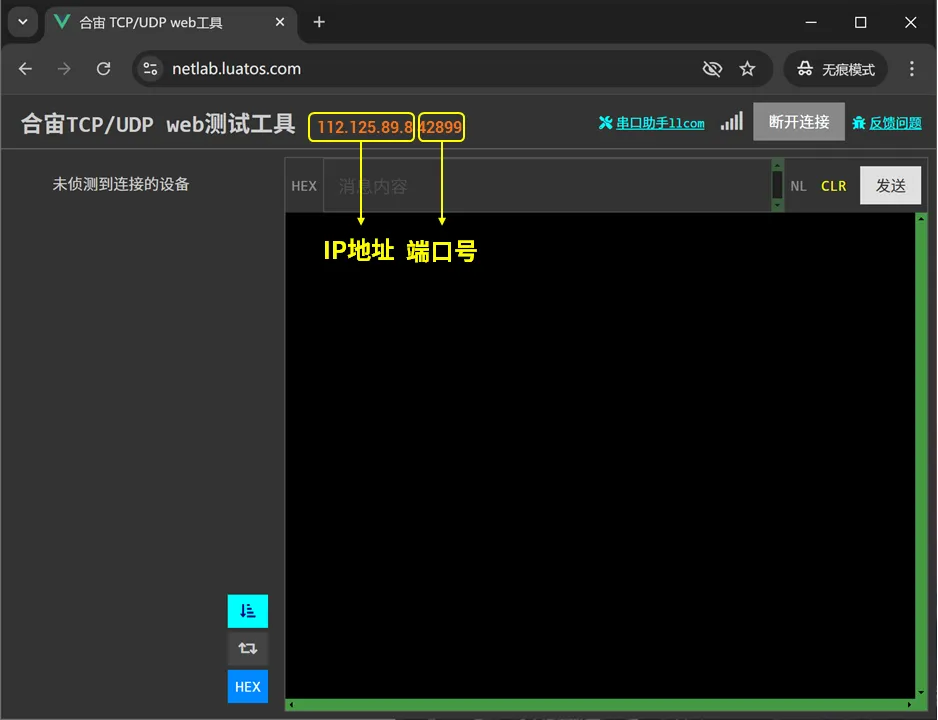
为了方便客户调试,我们制作了一个远程测试网页。请先打开网页:
合宙TCP/UDP web测试工具:
https://netlab.luatos.com/

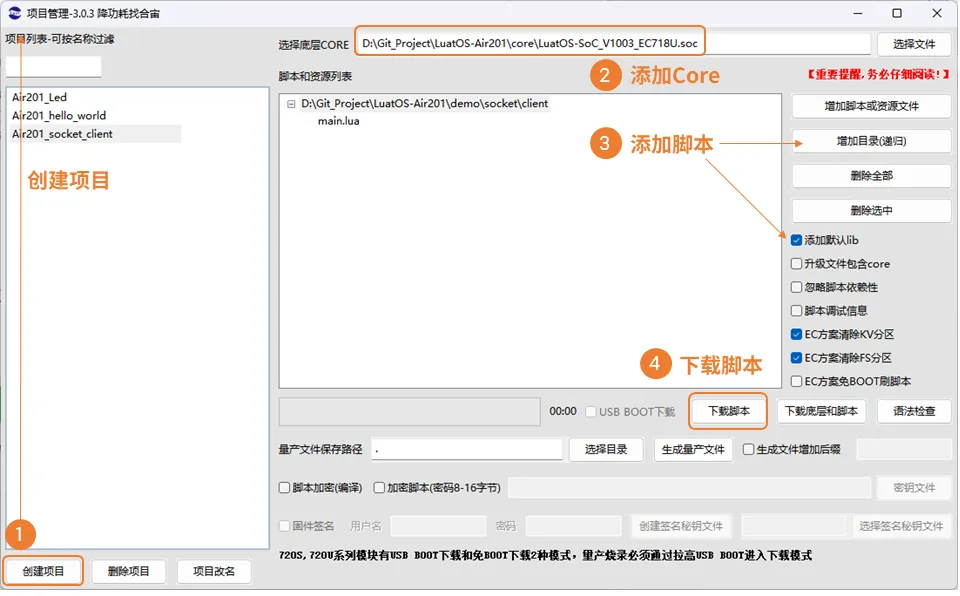
1.2 创建项目
和之前的教程步骤一样(新同学建议先看前文基础知识),可以在LuaTools项目管理中新建一个项目,重新选择底层Core和脚本。
2. 编写代码
分别编写初始化LED灯、通过字符串控制LED、设置服务器接口、链接服务器,以及增加定时上报消息到服务器等5个部分的相关代码。
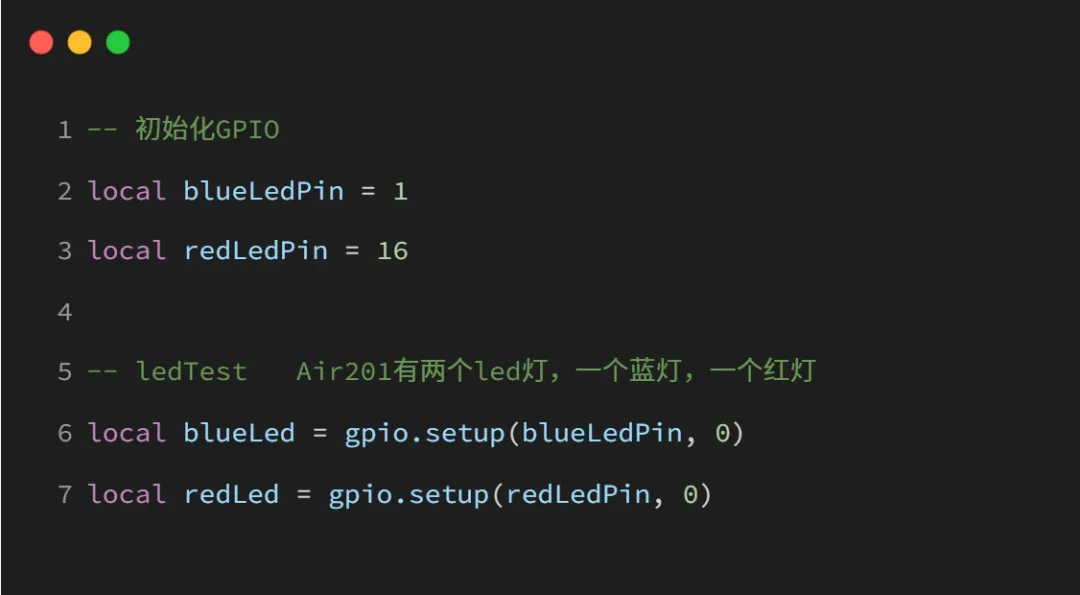
2.1 初始化LED灯
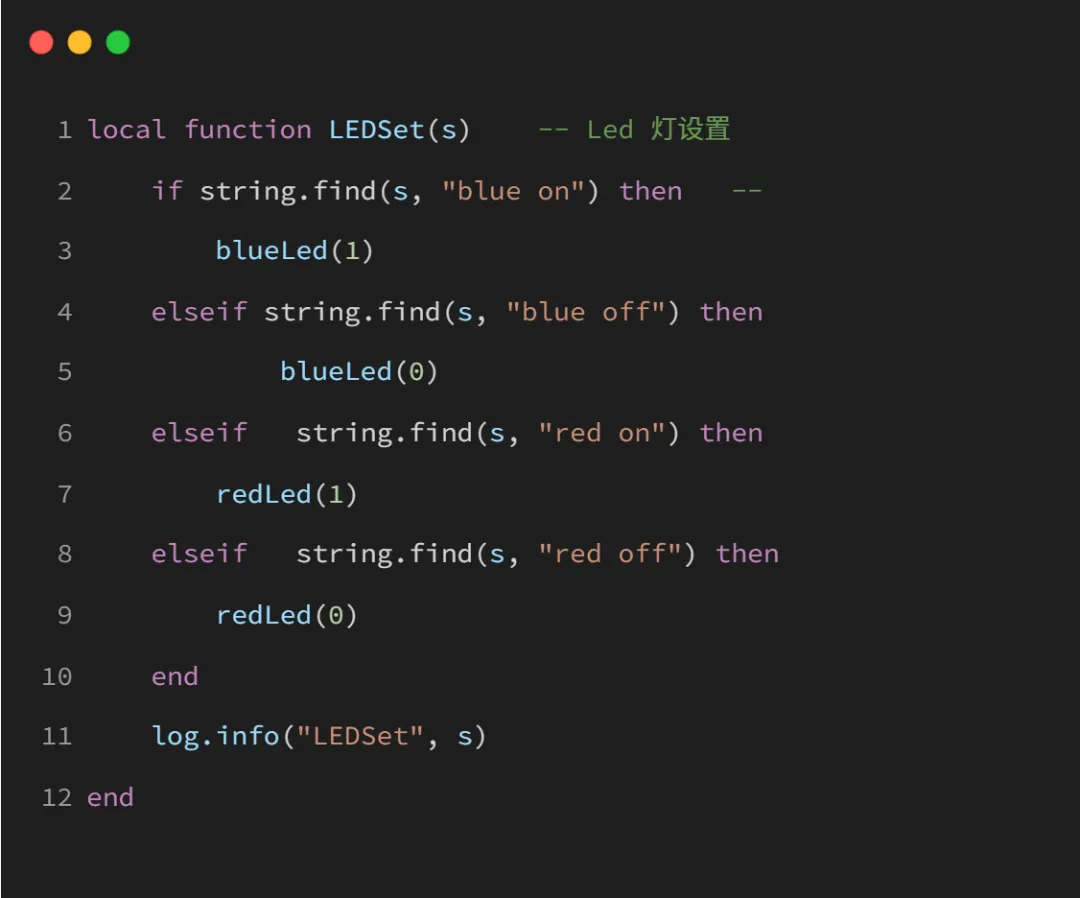
2.2 通过字符串控制LED
这里,我们简单通过blue on,blue off,red on,red off来控制蓝灯、红灯的亮灭。
2.3 设置服务器接口
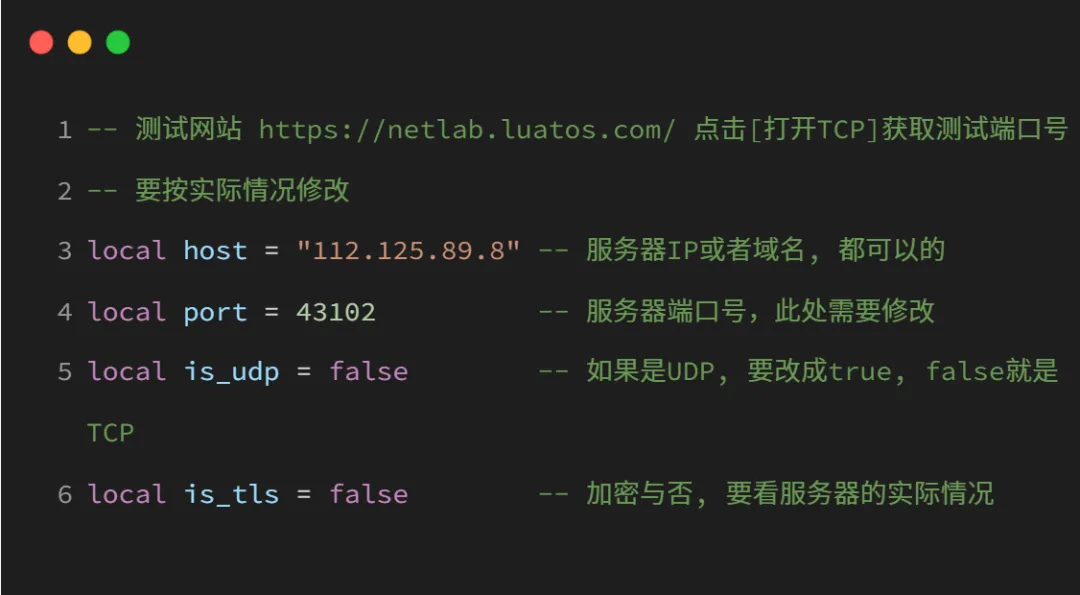
此处注意:
port需要修改,根据建立远程服务器时候产生的Port修改。如果连不上服务器,多关注这个参数。
2.4 链接服务器
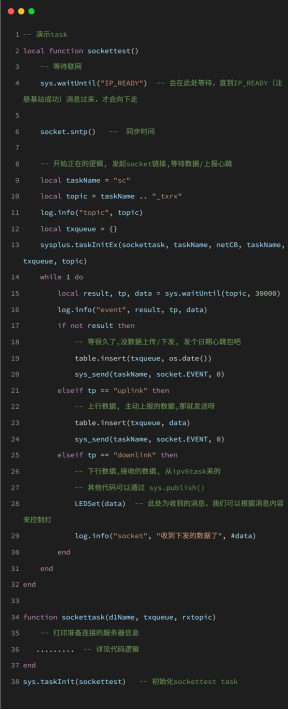
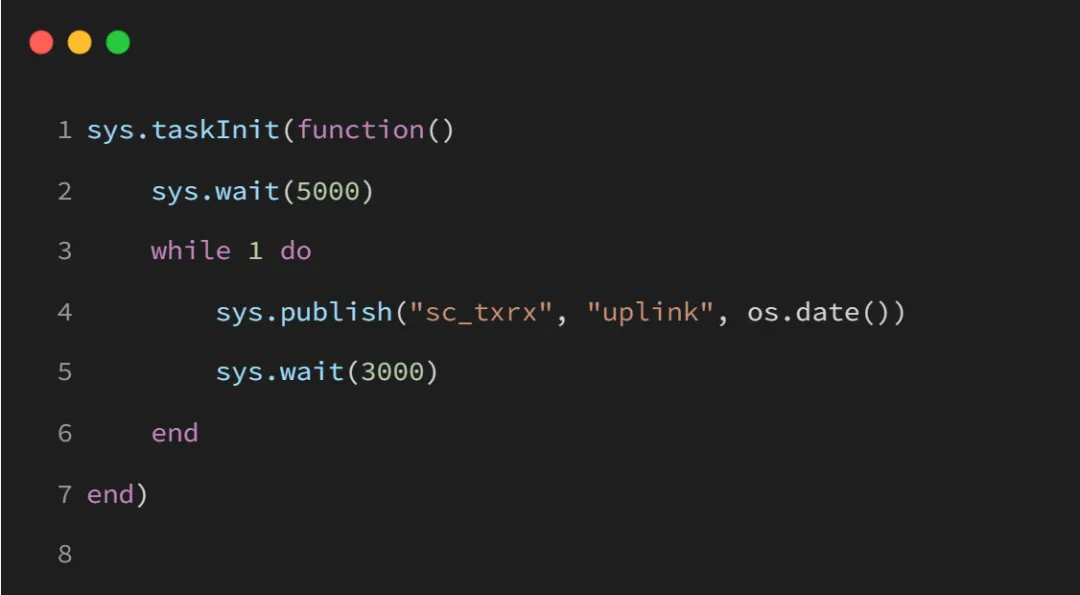
2.5 增加定时上报消息到服务器
一直上报时间,增加上行互动:
3. 调试代码
接下来,通过https://netlab.luatos.com/网页远程控制Air201。
3.1 下载demo
直接下载demo到Air201。
3.2 网页显示
如果显示下图,则表示链接成功,并且一直上报数据。

3.3 下发指令
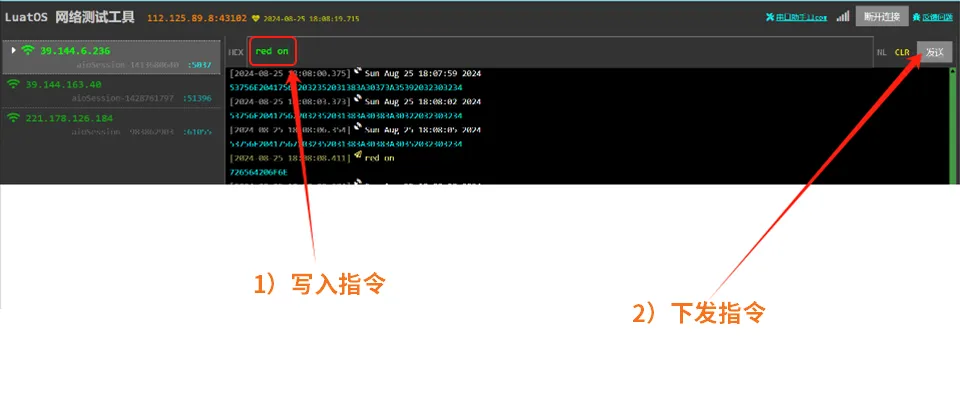
3.4 效果展示
一切就绪,让我们来看看网页远程控制红灯亮灭的效果。
▼ 红灯亮 ▼
▼ 红灯灭 ▼
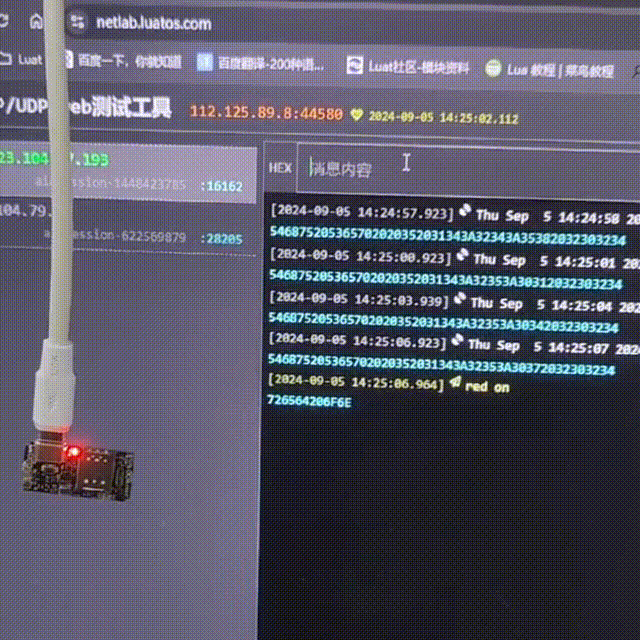
通过指令轻松实现红灯远程控制
sf
-
定位模组Air201——快速实现打电话!2024-12-16 1530
-
Air201定位模组LuatOS轻松搞定超低功耗模式!2024-12-01 1248
-
Air201模组教程:SPI通信与外部Flash的连接之道!2024-11-18 1925
-
UART串口通信示例:开启通信宝藏之门的定位模组LuatOS入门2024-11-03 2394
-
Air201资产定位模组LuatOS:录音和播放录音功能的操作方法2024-10-16 1211
-
你要的录音&播放录音功能,直接用!Air201资产定位模组LuatOS快速入门2024-09-27 1326
-
合宙Air201资产定位模组LuatOS快速入门(五):玩转扩展库,温湿度传感器篇!2024-09-18 1344
-
合宙Air201资产定位模组LuatOS快速入门:GPS/LBS/Wi-Fi定位,全安排!2024-09-14 1647
-
资产定位 | 合宙Air201模组LuatOS快速入门01-hello world2024-09-13 1746
-
合宙LuatOS产品规格书——Air780EQ2024-08-29 1487
-
合宙Air201定位模组,千万不要忘记设置这个......2024-08-09 3064
-
合宙 Air780E/Air780EP/Air780EQ/Air201模块遇到死机问题如何分析2024-08-01 2522
-
合宙新品Air510U定位模组,支持北斗/GPS双模卫星定位2023-03-02 8135
全部0条评论

快来发表一下你的评论吧 !
