

PWM输出实验步骤,PWM输出代码
模拟技术
描述
脉冲宽度调制(PWM),是英文“ Pulse Width Modulation” 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。简单一点,就是对脉冲宽度的控制。STM32 的定时器除了 TIM6 和 7。其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4路的 PWM 输出。
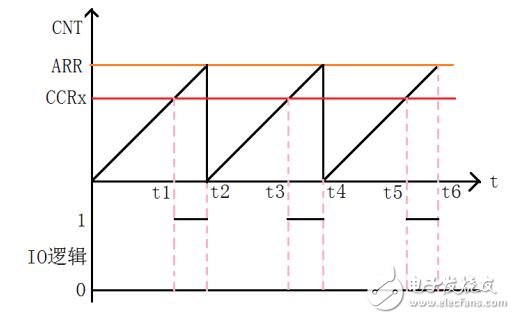
CCR1:捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
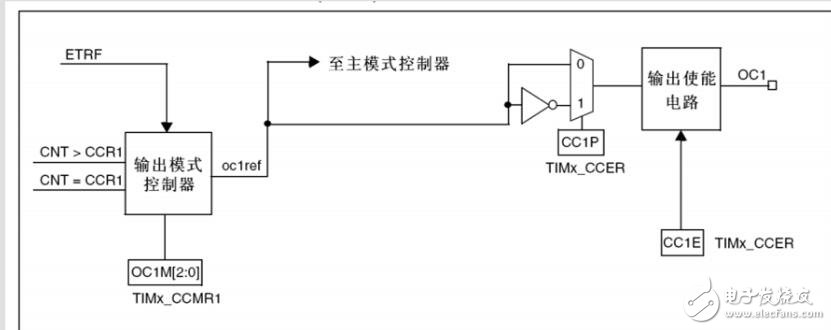
CCMR1: OC1M[2:0]位:对于PWM方式下,用于设置PWM模式1【110】或者PWM模式2【111】、CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效。CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开。
实验内容:使用 TIM3 的通道 2,把通道 2 重映射到 PB5, 产生 PWM 来控制 DS0 的亮度。
实验步骤
1、使能定时器3和相关IO口时钟。
使能定时器3时钟:RCC_APB1PeriphClockCmd();
使能GPIOB时钟:RCC_APB2PeriphClockCmd();
2、初始化IO口为复用功能输出。函数:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
3、这里我们是要把PB5用作定时器的PWM输出引脚,所以要重映射配置,
所以需要开启AFIO时钟。同时设置重映射。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
4、初始化定时器:ARR,PSC等:TIM_TimeBaseInit();
5、初始化输出比较参数:TIM_OC2Init();
6、使能预装载寄存器: TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
7、使能定时器。TIM_Cmd();
8、不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare2();
代码
#include “led.h”
#include “delay.h”
#include “usart.h”
#include “time.h”
#include “pwm.h”
int main()
{
u16 led0pwmval = 0;
u8 dir = 1;
delay_init();
LED_Init();
TIM3_CH2_PWM_Init(899, 0); // 不分频,PWM 频率= 72000/900 = 80KHz;
while(1)
{
delay_ms(10);
if(dir)
led0pwmval++;
else
led0pwmval--;
if (led0pwmval 》 300)
dir = 0;
if (led0pwmval == 0)
dir = 1;
TIM_SetCompare2(TIM3, led0pwmval);
}
}
123456789101112131415161718192021222324252627282930313233343536
pwm.h
#ifndef __PWM_H
#define __PWM_H
#include “sys.h”
void TIM3_CH2_PWM_Init(u16 arr, u16 fprer);
#endif
12345678910
pwm.c
#include “pwm.h”
void TIM3_CH2_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
// 使能TIM3的时钟;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// 复用时钟使能;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
// GPIOB时钟使能;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// TIM3_CH2部分重映射到PB.5上;
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);
// 设置PB.5为复用功能输出;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 初始化TIM3;
TIM_TimeBaseInitStruct.TIM_ClockDivision = 0; // 设置时钟分割;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数方式;
TIM_TimeBaseInitStruct.TIM_Period = arr; // 设置自动重装载值;
TIM_TimeBaseInitStruct.TIM_Prescaler = psc; // 设置分频系值;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
// 设置TIM3_CH2的PWM模式
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2; // 选择PWM模式2;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; // 比较输出使能;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性高;
TIM_OC2Init(TIM3, &TIM_OCInitStruct);
// 使能预装载寄存器;
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
// 使能TIM3;
TIM_Cmd(TIM3,ENABLE);
}
-
PWM输出原理、PWM工作过程、PWM功能常用函数和PWM输出配置步骤2021-06-29 0
-
PWM输出配置步骤2021-08-09 0
-
定时器输出PWM实验2008-09-22 7495
-
ALIENTEK_MINISTM32_实验8_PWM输出实验2016-02-18 728
-
pwm输出实验2016-09-09 775
-
PWM输出实验_标准例程2016-11-18 625
-
实验9 PWM输出实验2017-01-22 946
-
PWM的输出实验详细源代码免费下载2019-04-23 889
-
PWM输出实验的程序和工程文件免费下载2019-07-08 839
-
PWM输出实验详细示例2021-12-20 532
-
STM32 PWM输出延迟问题2021-12-24 884
-
MBD模型设计的PWM输出步骤和方法2023-01-20 1670
-
基于MBD模型设计的PWM输出步骤和方法2023-04-20 1237
-
PWM输出控制电机2023-05-06 521
-
PWM输出配置方法2024-11-04 1887
全部0条评论

快来发表一下你的评论吧 !
