

卡尔曼滤波应用实例
调谐/滤波
27人已加入
描述
卡尔曼滤波的一个典型实例是从一组有限的,包含噪声的,对物体位置的观察序列(可能有偏差)预测出物体的位置的坐标及速度。在很多工程应用(如雷达、计算机视觉)中都可以找到它的身影。同时,卡尔曼滤波也是控制理论以及控制系统工程中的一个重要课题。
实例
一。 已知一物体作自由落体运动,对其高度进行了20次测量,测量值如下表
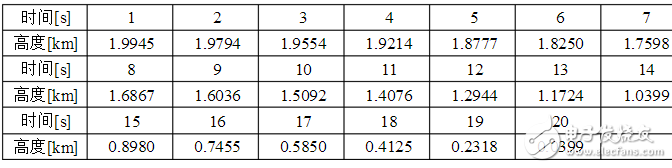
设高度的测量误差是均值为0、方差为1的高斯白噪声随机序列,该物体的初始高度0h和速度0V也是高斯分布的随机变量,且0000019001000,var10/02EhhmPEVmsV。试求该物体高度
和速度随时间变化的最优估计。(2/80.9smg)
解:
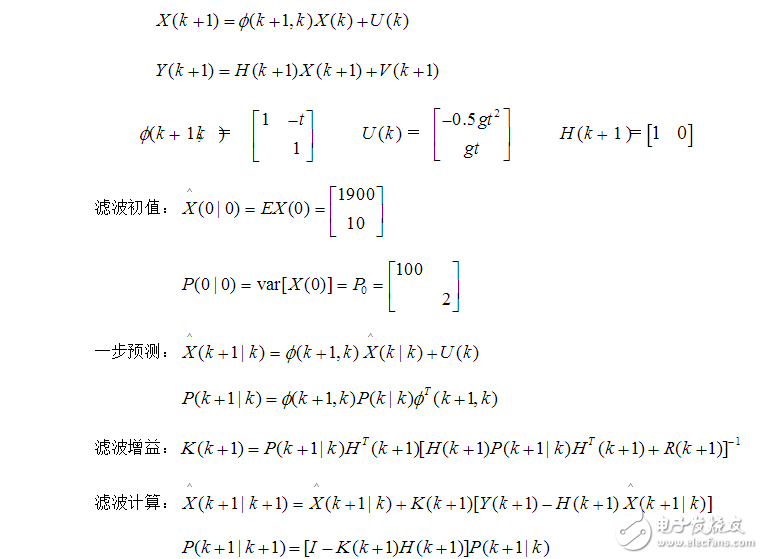
1. 令X(k)=hkXkvk) t=1 R(k)=1 Q(k)=0
根据离散时间卡尔曼滤波公式,则有:
2.实验结果
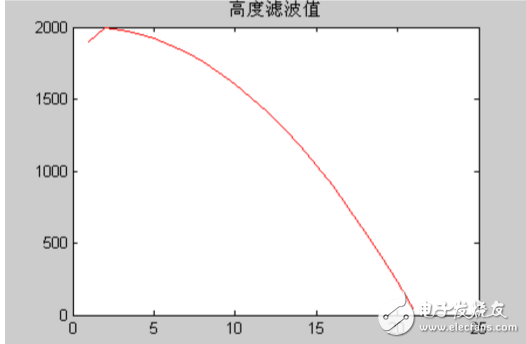
高度随时间变化估计
 ’
’
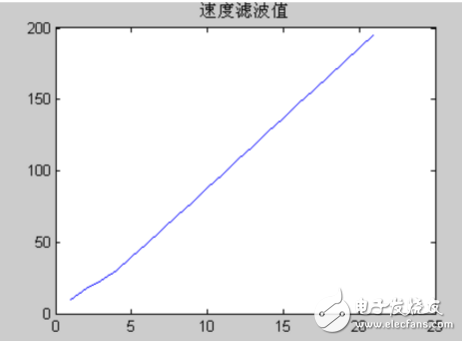
速度随时间变化的最优估计
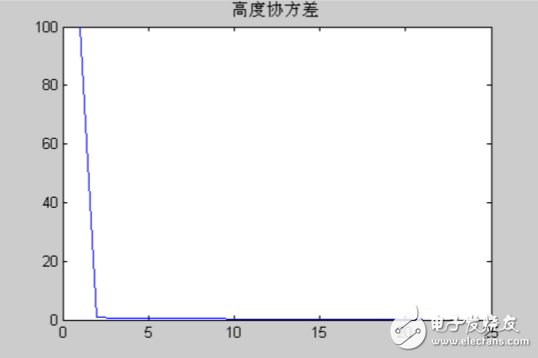
计高度协方差
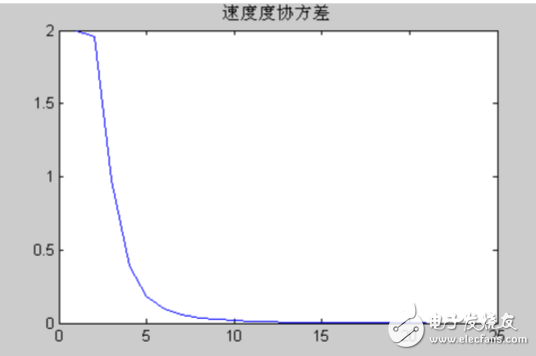
速度协方差
速度协方差从以上的结果,可以得到高度和速度的估计值,再通过所得到的高度协方差和速度协方差,可见用卡尔曼滤波法,虽然刚开始的初始高度协方差很大为100,但通过2步之后减小到不超过1,逐渐接近于0,同样的速度协方差刚开始的时候也比较大,为2,但是通过5步之后迅速减小,到10步之后接近于0。
3.有关参数的影响(例如初始条件、噪声统计特性对滤波结果的影响等);
1)初始条件改变时,改变初始高度值,和速度值 00230030/EhmEVms
由实验结果分析可得
度滤波值和速度滤波值在开始几步接近初始值,协方差值基本不变。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 卡尔曼滤波
-
卡尔曼滤波器介绍2008-07-14 13721
-
卡尔曼滤波2013-07-04 3142
-
卡尔曼滤波有哪些应用2021-07-12 2092
-
卡尔曼滤波简介2022-02-28 2251
-
卡尔曼滤波学习及应用2016-04-13 1018
-
卡尔曼滤波算法2016-12-17 1226
-
一文看懂mpu6050卡尔曼滤波程序2018-03-09 76450
-
卡尔曼滤波原理及应用2022-06-09 581
-
扩展卡尔曼滤波的原理2022-08-12 7575
-
卡尔曼滤波(KF)与扩展卡尔曼(EKF)2023-05-10 1018
-
浅析卡尔曼滤波2023-06-14 3264
-
什么是卡尔曼滤波?卡尔曼滤波的作用是什么2023-08-08 9662
-
卡尔曼滤波家族2024-01-14 2722
-
卡尔曼滤波在图像处理中的应用实例 如何调优卡尔曼滤波参数2024-12-16 3098
-
卡尔曼滤波基础知识2025-01-08 2922
全部0条评论

快来发表一下你的评论吧 !
