

mpu6050如何使用
电子常识
描述
MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前的三个加速度分量和三个旋转角速度。由于其体积小巧,功能强大,精度较高,不仅被广泛应用于工业,同时也是航模爱好者的神器,被安装在各类飞行器上驰骋蓝天。
随着Arduino开发板的普及,许多朋友希望能够自己制作基于MPU6050的控制系统,但由于缺乏专业知识而难以上手。此外,MPU6050的数据是有较大噪音的,若不进行滤波会对整个控制系统的精准确带来严重影响。
MPU6050芯片内自带了一个数据处理子模块DMP,已经内置了滤波算法,在许多应用中使用DMP输出的数据已经能够很好的满足要求。关于如何获取DMP的输出数据,我将在以后的文章中介绍。本文将直接面对原始测量数据,从连线、芯片通信开始一步一步教你如何利用Arduino获取MPU6050的数据并进行卡尔曼滤波,最终获得稳定的系统运动状态。
如果你想玩四轴,想搞什么空中鼠标,平衡车等待,那么MPU6050真的是太强大了,能做很多东西。
玩MPU6050的步骤:
1.学习I2C,I2C就是MPU6050传送数据到单片机的一种协议,类似于USB,当然USB还是比较有难度的。
2.了解MPU6050相关寄存器,有中文版本的,一边学一边看例程就可以获取数据了。
在这里只是简单地介绍下,先看下我们的书或者教程,从EEPROM里面写入和读取数据,因为EEPROM写入和读取数据也是根据I2C协议来的。I2C有分软件和硬件,软件就你通过对I2C的时钟线和数据线,可能你不知道时钟线和数据线,那还是先去学I2C的基础教程。
软件模拟I2C就是根据下面的图然后再适当的时候给时钟线和数据线高低,具体可以看I2C的协议
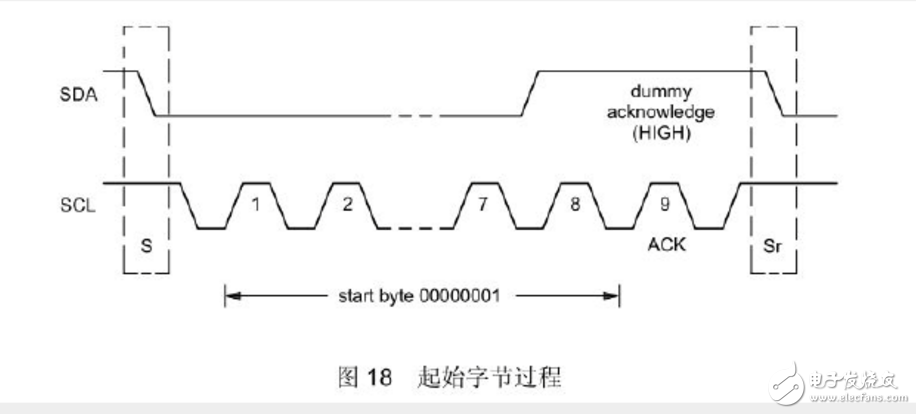
如果要写 MPU-60X0 寄存器,主设备除了发出开始标志(S)和地址位,还要加一个 R/W 位,0 为写,1 为读。在第 9 个时钟周期(高电平时),MPU-60X0 产生应答信号。然 后主设备开始传送寄存器地址(RA),接到应答后,开始传送寄存器数据,然后仍然要有应 答信号,依次类推。
单字节写时序:
多字节写时序:
如果要读取 MPU-60X0 寄存器的值,首先由主设备产生开始信号(S),然后发送从设 备地址位和一个写数据位,然后发送寄存器地址,才能开始读寄存器。紧接着,收到应答信 号后,主设备再发一个开始信号,然后发送从设备地址位和一个读数据位。然后,作为从设 备的 MPU-60X0 产生应答信号并开始发送寄存器数据。通信以主设备产生的拒绝应答信号 (NACK)和结束标志(P)结束。拒绝应答信号(NACK)产生定义为 SDA 数据在第 9 个 时钟周期一直为高。
-
 2大爷
2021-04-03
0 回复 举报最好是采用硬件IIC方式 收起回复
2大爷
2021-04-03
0 回复 举报最好是采用硬件IIC方式 收起回复
-
 DCDC方案
2021-03-01
0 回复 举报评论占个坑,我也好好学习 收起回复
DCDC方案
2021-03-01
0 回复 举报评论占个坑,我也好好学习 收起回复
- 相关推荐
- 热点推荐
- MPU6050
-
关于mpu6050问题2025-03-09 1431
-
MPU6050教程开源分享2023-06-25 2739
-
MPU6050数据手册2022-03-09 2930
-
MPU6050简介2021-12-06 2644
-
MPU6050开发 -- 数据分析2021-11-30 1145
-
mpu6050怎么与单片机连接2018-03-09 27823
-
Arduino与MPU6050的通信2017-11-07 9014
-
MPU6050(硬件IIC)2017-04-02 3175
-
MPU6050原理图2016-03-24 2736
-
MPU6050程序2015-12-15 1136
全部0条评论

快来发表一下你的评论吧 !
