

mpu6050测试程序
电子常识
描述
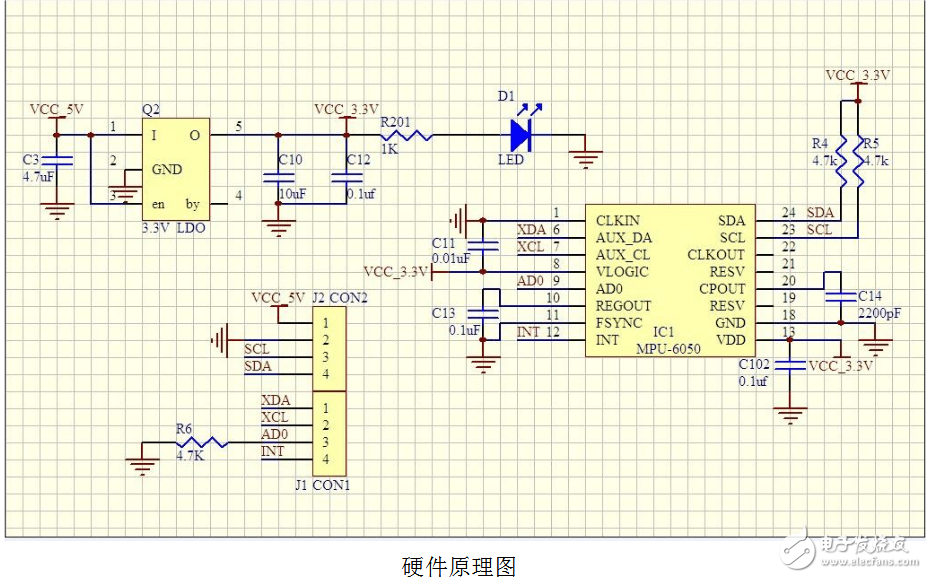
InvenSense公司的三轴陀螺仪MPU6050测试程序。IIC接口,51单片机驱动,LCD1602同步显示。
//****************************************
// MPU6050 IIC测试程序
// 使用单片机STC89C52
// 晶振:11.0592M
// 显示:LCD1602
// 编译环境 Keil uVision2
// 参考宏晶网站24c04通信程序
// 功能: 显示加速度计和陀螺仪的10位原始数据
// 时间:2013年3月1日
//****************************************
#include 《REG52.H》
#include 《math.h》 //Keil library
#include 《stdio.h》 //Keil library
#include 《INTRINS.H》
typedef unsigned char uchar;
typedef unsigned short ushort;
typedef unsigned int uint;
//****************************************
// 定义51单片机端口
//****************************************
#define DataPort P0 //LCD1602数据端口
sbit SCL=P1^0; //IIC时钟引脚定义
sbit SDA=P1^1; //IIC数据引脚定义
sbit LCM_RS=P2^0; //LCD1602命令端口
sbit LCM_RW=P2^1; //LCD1602命令端口
sbit LCM_EN=P2^2; //LCD1602命令端口
//****************************************
// 定义MPU6050内部地址
//****************************************
#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
#define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:
0x01(不自检,2G,5Hz)
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
#define SlaveAddress 0xD0 //IIC写入时的地址字节数据,+1为读取
//****************************************
//定义类型及变量
//****************************************
uchar dis[4]; //显示数字(-511至512)的字符数组
int dis_data; //变量
//int Temperature,Temp_h,Temp_l; //温度及高低位数据
//****************************************
//函数声明
//****************************************
void delay(unsigned int k); //延时
//LCD相关函数
void InitLcd(); //初始化
lcd1602
void lcd_printf(uchar *s,int temp_data);
void WriteDataLCM(uchar dataW); //LCD数据
void WriteCommandLCM(uchar CMD,uchar Attribc); //LCD指令 void DisplayOneChar(uchar X,uchar Y,uchar DData); //显示一个字符 void DisplayListChar(uchar X,uchar Y,uchar *DData,L); //显示字符串 //MPU6050操作函数 void InitMPU6050(); //初始化MPU6050
void Delay5us(); void I2C_Start(); void I2C_Stop();
void I2C_SendACK(bit ack); bit I2C_RecvACK();
void I2C_SendByte(uchar dat); uchar I2C_RecvByte(); void I2C_ReadPage(); void I2C_WritePage(); void display_ACCEL_x(); void display_ACCEL_y(); void display_ACCEL_z();
uchar Single_ReadI2C(uchar REG_Address); //读取I2C数据 void Single_WriteI2C(uchar REG_Address,uchar REG_data); //向I2C写入数据
//****************************************
//整数转字符串
//****************************************
void lcd_printf(uchar *s,int temp_data) { if(temp_data《0) { temp_data=-temp_data; *s=‘-’; } else *s=‘ ’; *++s =temp_data/100+0x30; temp_data=temp_data%100; //取余运算 *++s =temp_data/10+0x30; temp_data=temp_data%10; //取余运算 *++s =temp_data+0x30; }
//****************************************
//延时
//****************************************
void delay(unsigned int k) { unsigned int i,j; for(i=0;i《k;i++)
{ for(j=0;j《121;j++); } }
//****************************************
//LCD1602初始化
//****************************************
void InitLcd() { WriteCommandLCM(0x38,1); WriteCommandLCM(0x08,1); WriteCommandLCM(0x01,1); WriteCommandLCM(0x06,1); WriteCommandLCM(0x0c,1); DisplayOneChar(0,0,‘A’); DisplayOneChar(0,1,‘G’); }
//****************************************
//LCD1602写允许
//****************************************
void WaitForEnable(void) { DataPort=0xff; LCM_RS=0;LCM_RW=1;_nop_(); LCM_EN=1;_nop_();_nop_(); while(DataPort&0x80); LCM_EN=0; }
//****************************************
//LCD1602写入命令
//****************************************
void WriteCommandLCM(uchar CMD,uchar Attribc) { if(Attribc)WaitForEnable(); LCM_RS=0;LCM_RW=0;_nop_(); DataPort=CMD;_nop_(); LCM_EN=1;_nop_();_nop_();LCM_EN=0; }
//****************************************
//LCD1602写入数据
//****************************************
void WriteDataLCM(uchar dataW) { WaitForEnable();
SCL = 0; //拉低时钟线 Delay5us(); //延时 return CY; }
//**************************************
//向I2C总线发送一个字节数据
//**************************************
void I2C_SendByte(uchar dat) {
uchar i;
for (i=0; i《8; i++) //8位计数器 {
dat 《《= 1; //移出数据的最高位 SDA = CY; //送数据口 SCL = 1; //拉高时钟线 Delay5us(); //延时
SCL = 0; //拉低时钟线 Delay5us(); //延时 }
I2C_RecvACK(); }
//**************************************
//从I2C总线接收一个字节数据
//**************************************
uchar I2C_RecvByte() {
uchar i;
uchar dat = 0;
SDA = 1; //使能内部上拉,准备读取数据, for (i=0; i《8; i++) //8位计数器 {
dat 《《= 1;
SCL = 1; //拉高时钟线 Delay5us(); //延时 dat |= SDA; //读数据
SCL = 0; //拉低时钟线 Delay5us(); //延时 }
return dat; }
//**************************************
//向I2C设备写入一个字节数据
//**************************************
void Single_WriteI2C(uchar REG_Address,uchar REG_data)
{
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号 I2C_SendByte(REG_Address); //内部寄存器地址, I2C_SendByte(REG_data); //内部寄存器数据, I2C_Stop(); //发送停止信号 }
//**************************************
//从I2C设备读取一个字节数据
//**************************************
uchar Single_ReadI2C(uchar REG_Address) { uchar REG_data; I2C_Start();
//起始信号 I2C_SendByte(SlaveAddress);
//发送设备地址+写信号 I2C_SendByte(REG_Address); //发送存储单元地址,从0开始 I2C_Start(); //起始信号 I2C_SendByte(SlaveAddress+1); //发送设备地址+读信号 REG_data=I2C_RecvByte(); //读出寄存器数据 I2C_SendACK(1); //接收应答信号 I2C_Stop(); //停止信号 return REG_data; }
//**************************************
//初始化MPU6050
//**************************************
void InitMPU6050() { Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态 Single_WriteI2C(SMPLRT_DIV, 0x07); Single_WriteI2C(CONFIG, 0x06); Single_WriteI2C(GYRO_CONFIG, 0x18); Single_WriteI2C(ACCEL_CONFIG, 0x01); }
//**************************************
//合成数据
//************************************** int GetData(uchar REG_Address) { char H,L; H=Single_ReadI2C(REG_Address); L=Single_ReadI2C(REG_Address+1); return (H《《8)+L; //合成数据 }
//**************************************
//在1602上显示10位数据
//**************************************
void Display10BitData(int value,uchar x,uchar y) { value/=64; //转换为10位数据 lcd_printf(dis, value); //转换数据显示 DisplayListChar(x,y,dis,4); //启始列,行,显示数组,显示长度 }
//**************************************
//显示温度
//**************************************
//void display_temp() //{
// Temp_h=Single_ReadI2C(TEMP_OUT_H); //读取温度 // Temp_l=Single_ReadI2C(TEMP_OUT_L); //读取温度 // Temperature=Temp_h《《8|Temp_l; //合成温度
// Temperature = 35+ ((double) (Temperature + 13200)) / 280; // 计算出温度 // lcd_printf(dis,Temperature); //转换数据显示
// DisplayListChar(11,1,dis,4); //启始列,行,显示数组,显示位数 //}
//*********************************************************
//主程序
//*********************************************************
void main() { delay(500); //上电延时 InitLcd(); //液晶初始化 InitMPU6050(); //初始化MPU6050 delay(150); while(1) { Display10BitData(GetData(ACCEL_XOUT_H),2,0); //显示X轴加速度 Display10BitData(GetData(ACCEL_YOUT_H),7,0); //显示Y轴加速度 Display10BitData(GetData(ACCEL_ZOUT_H),12,0); //显示Z轴加速度 Display10BitData(GetData(GYRO_XOUT_H),2,1); //显示X轴角速度 Display10BitData(GetData(GYRO_YOUT_H),7,1); //显示Y轴角速度 Display10BitData(GetData(GYRO_ZOUT_H),12,1); //显示Z轴角速度 delay(500); } }
-
 君山的士
2018-04-20
0 回复 举报我就是用这个程序,读MPU6050的原始数据显示的都是-004而且一直不变是该怎么办? 收起回复
君山的士
2018-04-20
0 回复 举报我就是用这个程序,读MPU6050的原始数据显示的都是-004而且一直不变是该怎么办? 收起回复
- 相关推荐
- 热点推荐
- MPU6050
-
基于Ginkgo USB-I2C适配器的MPU6050测试程序源码下载相关资料推荐2022-02-10 1048
-
MPU6050简介2021-12-06 2644
-
三轴陀螺仪MPU6050的测试程序免费下载2019-07-19 1717
-
基于Ginkgo USB-I2C适配器的MPU6050测试程序源码下载2018-12-05 1709
-
mpu6050姿态解算原理_mpu6050姿态解算程序2018-03-09 45348
-
Arduino与MPU6050的通信2017-11-07 9014
-
MPU6050(硬件IIC)2017-04-02 3175
-
三陀螺仪mpu6050测试程序2016-04-28 975
-
MPU6050九轴示例程序2016-02-18 1439
-
MPU6050程序2015-12-15 1136
-
MPU6050的测试程序,融合加速度与角速度的传感器2015-07-20 1631
-
三陀螺仪mpu6050测试程序(内部整理)2014-08-07 20886
-
血与泪的教训,终于可以驱动mpu6050了2013-08-22 175135
全部0条评论

快来发表一下你的评论吧 !
