

开放式激光振镜运动控制器在Ubuntu+Qt下CAD图形标刻
电子说
描述
前面课程我们讲述了如何通过Ubuntu+Qt进行振镜校正(详情点击→开放式激光振镜运动控制器在Ubuntu+Qt下的激光振镜校正),本节CAD图形标刻是在振镜校正的前提下实现的。
在正式学习之前,我们先了解一下正运动ZMC408SCAN-V22运动控制器,ZMC408SCAN-V22控制器支持在Linux环境下进行开发使用。
01ZMC408SCAN-V22硬件介绍
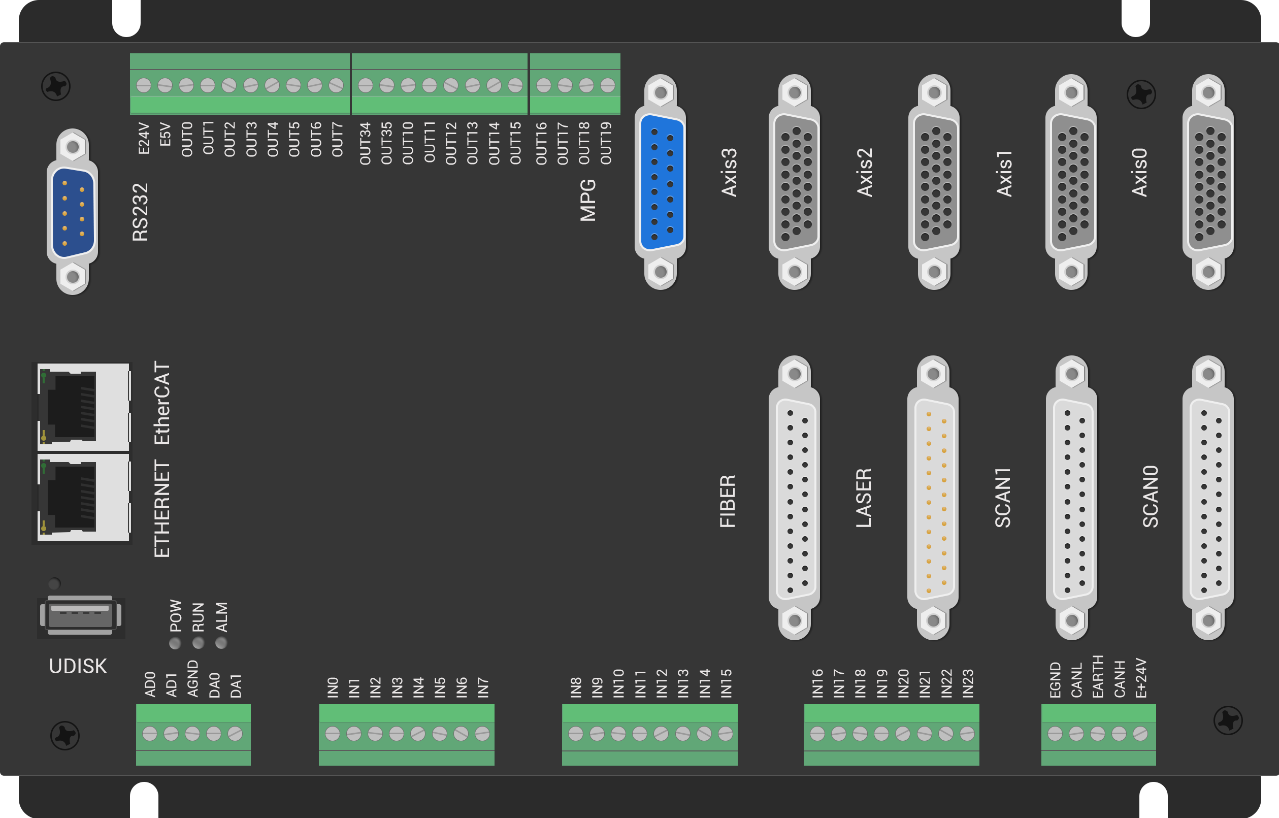
ZMC408SCAN-V22是正运动技术推出的高性能双振镜运动控制器,集成了2个百兆以太网口,支持EtherCAT、EtherNET、CAN、RS232、RS485、24路通用数字输入、20路通用数字输出、2路通用模拟量输出、2路通用模拟量输入、4个本地差分脉冲轴接口、1个MPG手轮编码器接口、2个带反馈振镜接口、1个LASER激光专用接口、1个FIBER激光器接口。开放式系统框图如下所示:
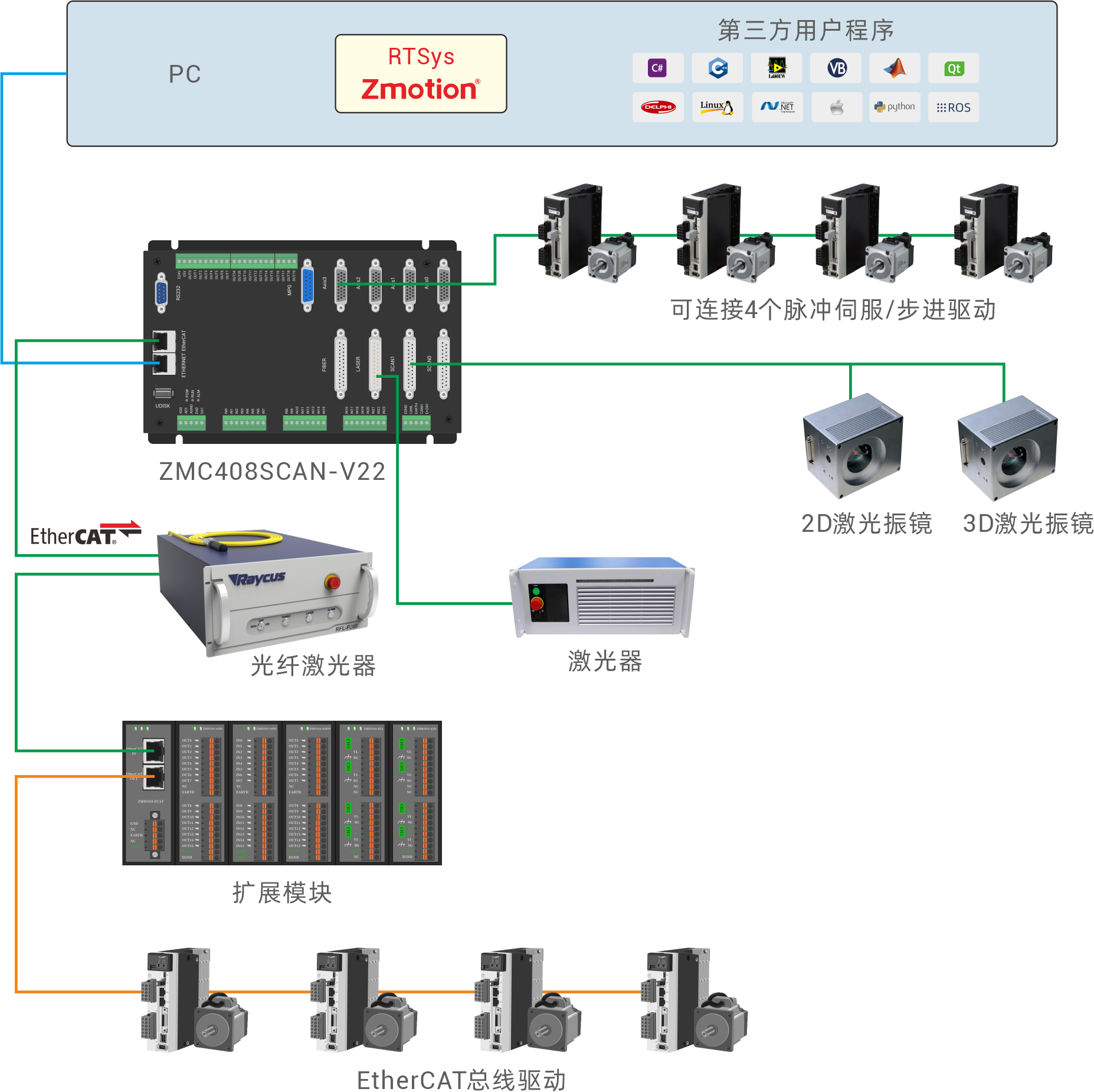
ZMC408SCAN-V22总线控制器支持EtherCAT总线连接,支持最快500μs的刷新周期,支持最多达16轴运动控制,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等;采用优化的网络通讯协议可以实现实时的运动控制。
ZMC408SCAN-V22通过CAN、EtherCAT总线可以连接各个扩展模块,从而扩展数字量、模拟量或运动轴。可以在
Windows,Linux,Mac,Android,Wince各种操作系统下开发,提供vc,c#,vb.net,labview等各种环境的dll库。上位机软件编程参考《ZMotion PC函数库编程手册》。

02 Ubuntu+Qt进行CAD图形标刻项目的开发
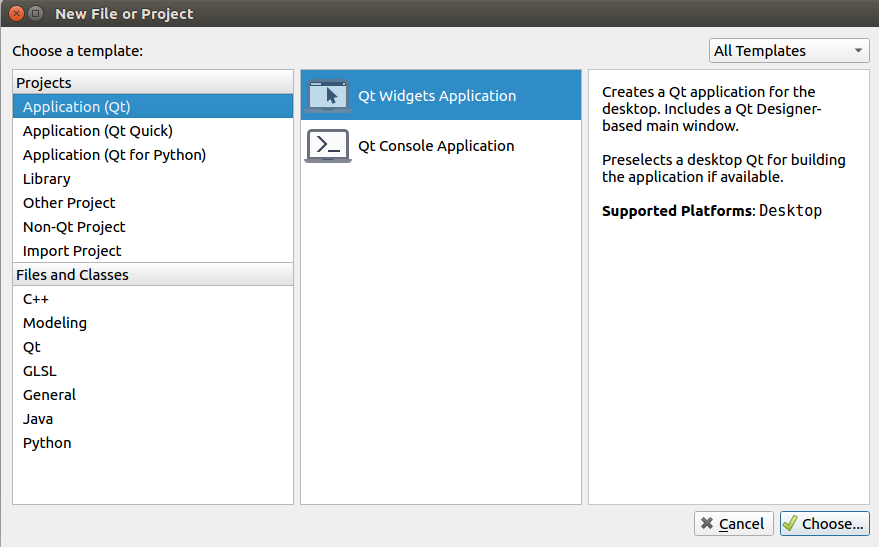
1.在Qt Creator菜单选择“文件”→“新建文件或项目...”,打开创建项目向导。选择Application项目集,创建Qt Widgets Application项目,设置项目名称和保存位置。
2.导入厂家提供的相关函数库及头文件。
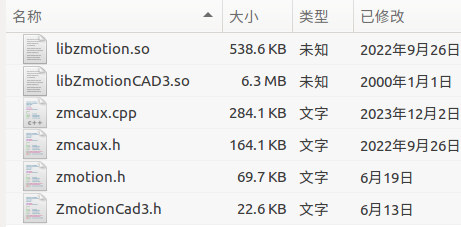
(1)将zmotion.h和zmcaux.h、zmcaux.cpp、ZmotionCad3.h以及libzmotion.so和libZmotionCAD3.so库复制到新建的项目文件夹中。
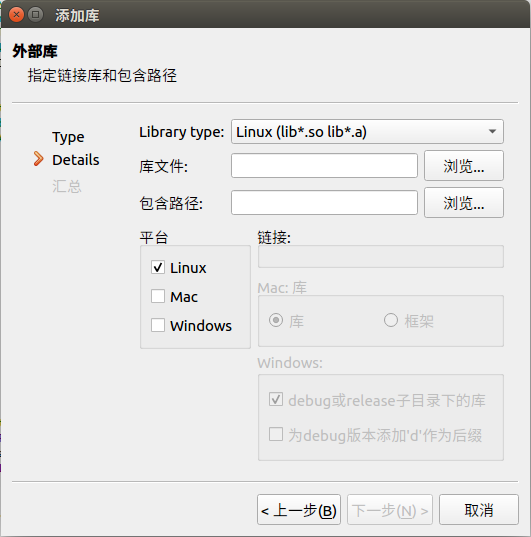
(2)在Qt Creator选择新建的Qt项目右击选择“添加库...”→“外部库”点击下一步,将刚才复制到项目文件夹上的libzmotion.so和libZmotionCAD3.so库文件导入到项目中。
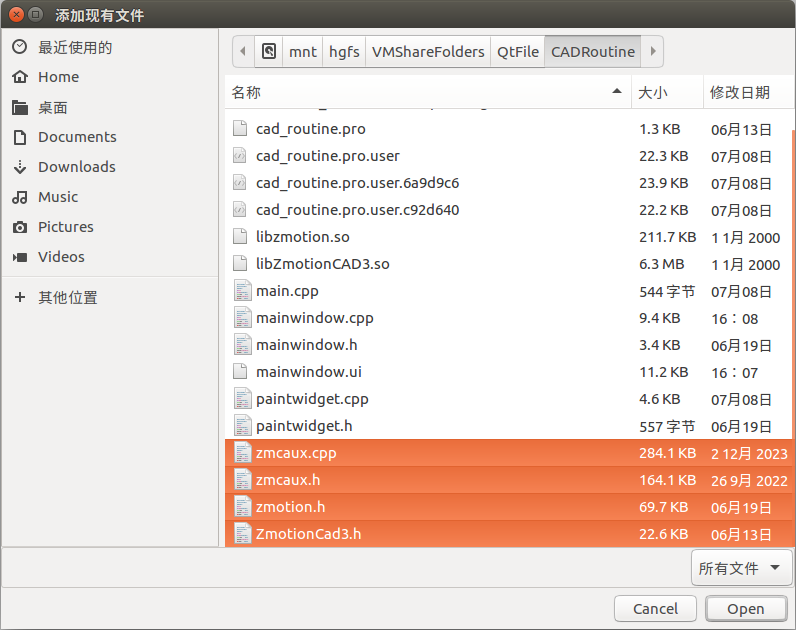
(3)在Qt Creator下右击新建的Qt项目,选择“添加现有文件...”,将之前复制到项目文件下的头文件zmotion.h和ZScancorrect.h以及zmcaux.cpp和zmcaux.h添加到项目中。
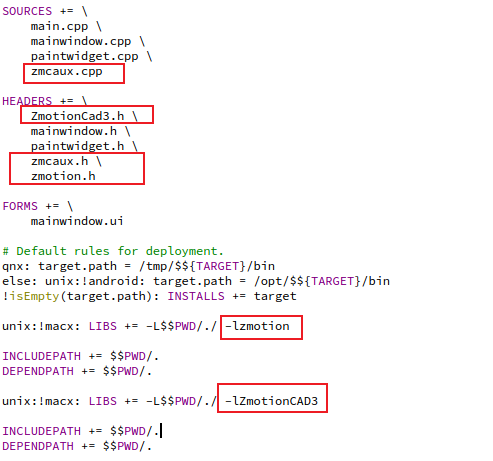
(4)函数库添加成功后,打开pro文件可以看到相关的函数库和头文件信息。此时已经将例程需要用到的函数库和头文件都加入到项目中了,接下来开始实现例程。
03CAD图形标刻流程以及相关函数介绍
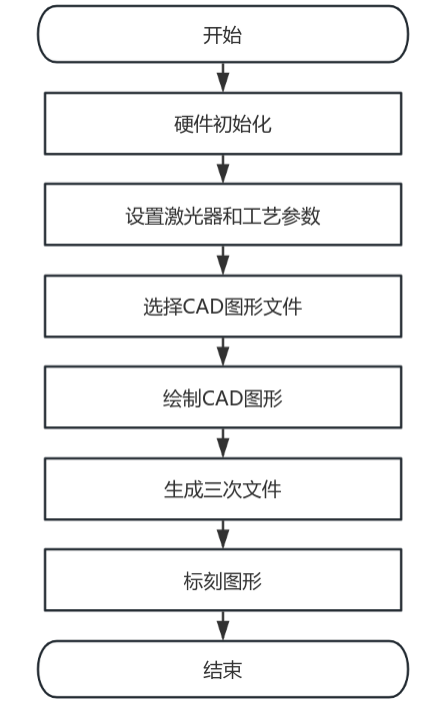
1.CAD图形标刻流程图
2.相关函数介绍
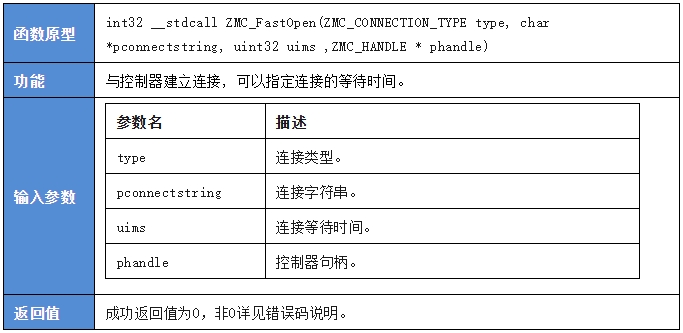
(1)连接控制器。
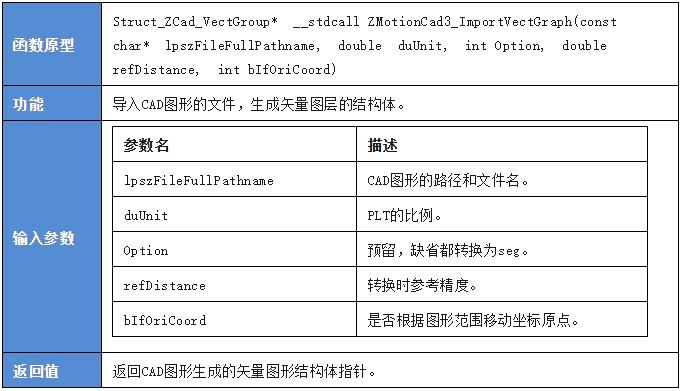
(2)导入CAD图形。
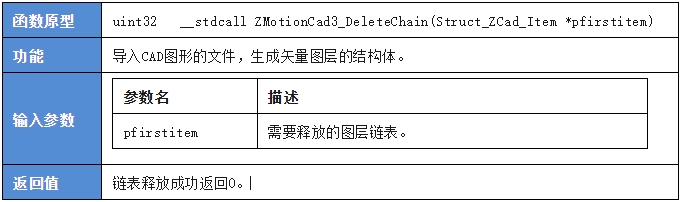
(3)取消CAD图形导入,释放整个图层链表。
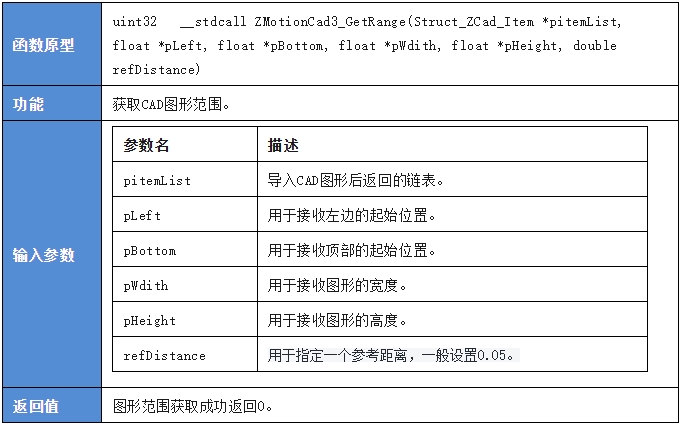
(4)获取CAD图形的范围。
(5)CAD图形解析后的链表结构,CAD库通过双向循环链表来存放具体的图形数据以及解析后的坐标数据。
typedef struct Struct_ZCad_VectGroup
{
int m_itemtype; //类型
struct Struct_ZCad_VectGroup *m_prev;
struct Struct_ZCad_VectGroup *m_pnext;
int m_GroupNum; //组号
uint32 m_ColorPen; //颜色 DWORD
Struct_ZCad_Vect *m_pVect; //曲线列表
}Struct_ZCad_VectGroup;
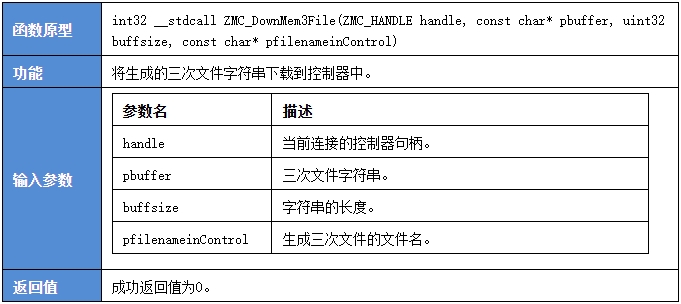
(6)下载三次文件。
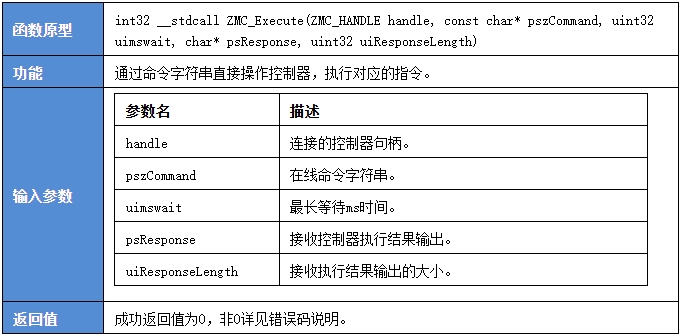
(7)通用命令执行接口。
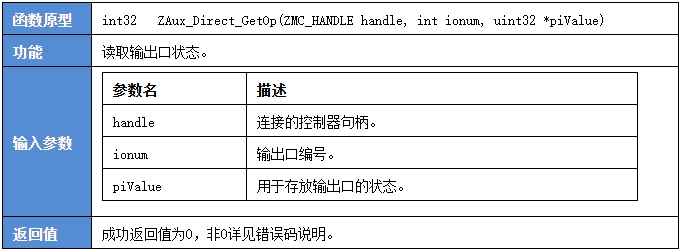
(8)获取输出口的状态。
04 CAD图形标刻的实现例程
CAD图形标刻例程主要是使用CAD库对CAD图形进行解析,将图形数据解析为链表结构,通过对链表的遍历,获取图形的坐标数据,将所有坐标点数据生成三次文件字符串,下载到控制器中,即可实现CAD图形的标刻。
1.导入CAD图形。
void MainWindow::on_import_2_clicked()
{
data_Load(); //获取界面的设置参数
strFile3.clear();
LaserScan_z3p_Init(); //三次文件字符串初始化
QString qstr = ui- >file_route- >text(); //获取CAD图形的路径和文件名
QByteArray byteArray = qstr.toUtf8();
const char* cstr = byteArray.constData();
m_pGraph = ZMotionCad3_ImportVectGraph(cstr,1016,0,0.001,0); // 导入图形生成轨迹
update(); //更新界面图形
}
2.遍历链表,生成三次文件字符串,首先获取CAD图形 数据,开始遍历链表,通过内部实现的空移、开光、标刻、关光函数接口生成三次文件字符串。以下是部分实现代码。
if(m_pGraph !=NULL)
{
Struct_ZCad_VectGroup *ps = m_pGraph;
do
{
Struct_ZCad_Vect * pVect = ps- >m_pVect;
do
{
Struct_ZCad_Seg * pSeg = pVect- >m_pLine;
//空移到起点
LaserScan_z3p_EmptyMove(strFile3,pSeg- >x1,pSeg- >y1,markPara.JumpSpeed,markPara.JumpDelay);
//开光
LaserScan_z3p_OpenLight(strFile3,io_value.emit_io,markPara.OpenDelay,markPara.MarkSpeed);
int i = 0;
do
{
if(!pSeg- >m_Param1)
{
// 运动
strFile3 += QString("MOVESCANABS(%1,%2)n").arg(pSeg- >x2).arg(pSeg- >y2);
}
i++;
pSeg = pSeg- >m_pnext;
}while(pSeg != pVect- >m_pLine);
//关光
LaserScan_z3p_CloseLight(strFile3,io_value.emit_io,markPara.CloseDelay,markPara.JumpDelay);
pVect = pVect- >m_pnext;
}while(pVect != ps- >m_pVect);
ps = ps- >m_pnext;
}while(ps != m_pGraph);
}
3.取消图形导入,清空图形链表,调用接口函数,清空链表,同时更新界面即可。
void MainWindow::on_cancel_clicked()
{
ZMotionCad3_DeleteChain((Struct_ZCad_Item *)m_pGraph);
m_pGraph = NULL;
update();
}
4.将三次文件字符串下载到控制器中。
void MainWindow::on_create_File3_clicked()
{
ZMC_DownMem3File(g_handle,strFile3.toLatin1().data(),strFile3.length(),"Zmc_CAD.z3p");
QString filePath = "Zmc_CAD.z3p";
QFile file(filePath);
if (file.open(QIODevice::WriteOnly | QIODevice::Text))
{
QTextStream stream(&file);
stream < < strFile3;
file.close();
qDebug() < < "File saved successfully:" < < filePath;
}
else
{
qDebug() < < "Failed to open file for writing:" < < filePath;
}
}
5.使用在线命令执行三次文件,标刻CAD图形。
void MainWindow::on_but_Mark_clicked()
{
if( 0 == g_handle)
{
QMessageBox::warning(this,"提示","控制器未连接!");
return;
}
char Response[1024];
ZMC_Execute(g_handle,"FILE3_RUN "Zmc_CAD.z3p",7 ",500,Response,1024);
}
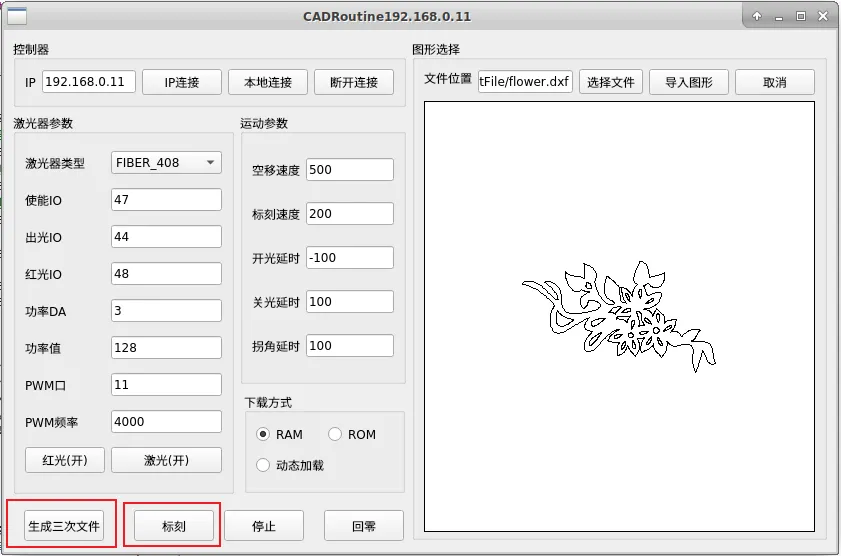
05 CAD图形标刻的实现效果
1.连接控制器,设置激光器以及工艺参数。

2.选择CAD图形导入,绘制图形。

3.生成三次文件,标刻CAD图形。
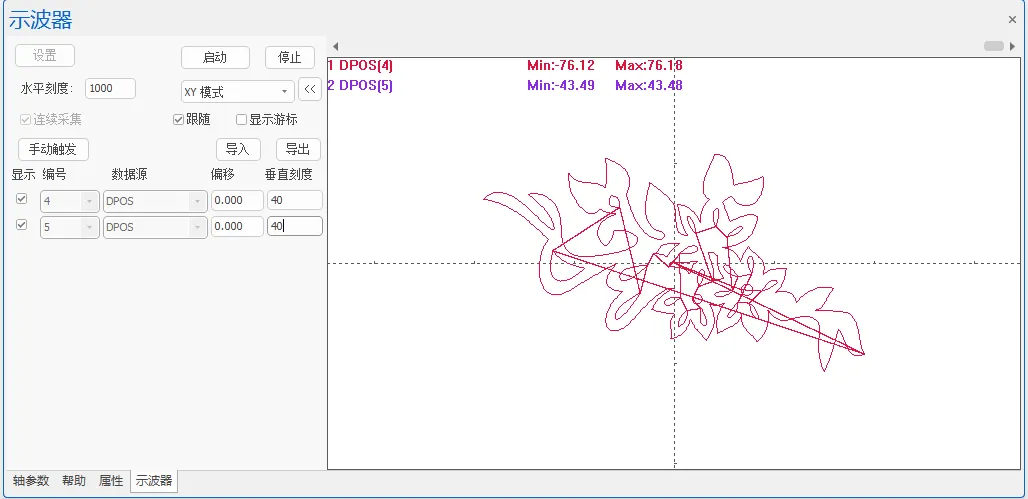
4.使用示波器抓取标刻的CAD图形。
本次,正运动技术开放式激光振镜运动控制器在Ubuntu+Qt下CAD图形标刻,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
开放式激光振镜运动控制器在Ubuntu+Qt下的激光振镜校正# 激光振镜# 运动控制器# 运动控制# 正运动正运动技术 2024-09-06
-
开放式激光振镜运动控制器在Ubuntu+Qt下的文本标刻 #正运动技术 #激光振镜 #运动控制器 #正运动正运动技术 2024-11-22
-
开放式激光振镜运动控制器在Ubuntu+Qt下CAD图形标刻 #正运动技术 #激光振镜 #运动控制器正运动技术 2024-11-25
-
振镜式激光打标控制器的工作原理及其电路设计2017-11-13 3020
-
激光振镜运动控制器(一):ZMC408SCAN接口与功能2022-08-01 4447
-
ZMC408SCAN振镜控制光纤激光器加工2022-09-14 3345
-
开放式激光振镜运动控制器:C++快速开发2022-10-19 2709
-
应用ZMC408SCAN开放式激光振镜运动控制器的C++开发2022-10-24 3224
-
开放式激光振镜运动控制器:C++振镜矫正方法与实现2022-10-27 4204
-
开放式激光振镜运动控制器ZMC408SCAN进行振镜矫正的方法与实现2022-10-31 3548
-
如何实现激光打标控制2022-11-01 4132
-
开放式激光振镜运动控制器的激光清洗应用2024-07-18 1535
-
开放式激光振镜运动控制器在Ubuntu+Qt下的文本标刻2024-09-10 1484
-
开放式激光振镜运动控制器在Ubuntu+Qt下自定义图形标刻2024-10-08 1858
-
开放式激光振镜运动控制器在旋转飞行打标中的应用2025-10-22 670
全部0条评论

快来发表一下你的评论吧 !
