

一文弄懂3种差分GPS定位方式的技术原理
描述
GPS定位应用广泛,我们使用的手机和汽车就自带GPS定位功能,它给我们的生活提供了许多便利。GPS定位存在一定的误差,误差来自3方面:一方面是由卫星钟误差、星历误差、电离层误差、对流层误差等导致的;另一方面是由传播延迟导致的;此外还有用户接收机固有的误差,由内部噪声、通道延迟、多路径效应等原因导致的。
为了尽可能消除GPS定位误差,我们可以引入差分GPS定位技术。利用差分技术,卫星钟误差、星历误差、电离层误差、对流层误差可以完全消除;传播延迟误差大部分可以消除,消除程度主要取决于基准接收机和用户接收机的距离;内部噪声、通道延迟、多路径效应误差则无法消除。
关于差分定位的技术原理,我们在前面的文章介绍过,大家可以参考文章:GPS定位及差分GPS定位技术原理 ,接下来我们来介绍3种差分GPS定位方式。
差分GPS定位分为:位置差分、伪距差分( RTD)和载波相位差分(RTK),接下来我们来分别介绍。
位置差分
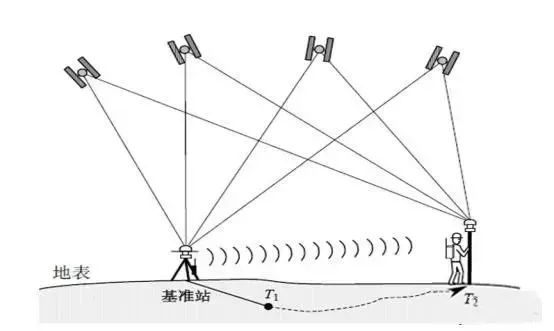
已知坐标点的差分定位基准站实时观测4颗卫星后进行三维定位,得出当前基准站的坐标测量值;
将坐标测量值与基准站实际坐标值的差值作为差分校正量,基准站利用数据链将所得的差分校正量发送给流动站,流动站用接收到的差分校正量在自身卫星接收机接收到的测量值的基础上进行坐标修改。
注意事项:采用位置差分技术时,基准站与流动站必须观测同一组卫星,流动站与基准站之间的距离不超过100km。
伪距差分
伪距差分是当前应用最为广泛的一种差分技术,在一定范围的定位区域内,设置一个或多个定位基准站,连续观测所有在信号接收范围内的卫星伪距,基准站利用已知坐标计算出自己到卫星的几何距离;
将几何距离与观测所得的伪距比较,利用一个α-β滤波器将此差值滤波并求出其伪距修正值,并将所有卫星的伪距修正值传输给流动站,流动站利用此修正值来修改卫星传输来的测量伪距。
注意事项:采用伪距差分技术时,流动站与基准站距离越近,定位精度越高。
载波相位差分(RTK)
载波相位差分技术,又称实时动态载波相位差分技术(Real Time Kinematic,RTK);
载波相位差分技术中基准站不直接传输关于卫星测量的差分校正量,而是发送卫星的测量原始值及自身坐标信息;
流动站收到基准站的数据后,与自身观测卫星的数据组成相位差分观测值,利用组合后的测量值求出基线向量,完成相对定位,进而推算出测量点的坐标;
采用RTK进行定位工作时,除了配备基准站接收机和流动站接收机外,还需要配备数据通信设备;
基准站需将自己所获得的载波相位观测值及基准站坐标通过数据通信链实时播发给在其周围工作的动态用户;
流动站数据处理模块使用动态差分定位的方式确定出流动站相对应基准站的位置,然后根据基准站的坐标求得自己的瞬时绝对位置。
注意事项
在实际应用中,有2种实现载波相位差分的方法,分别是修正法和差分法;
修正法:基准站将载波相位修正量发给流动站,以改正其载波相位观测值,得到自身坐标;
差分法:将基准站观测的载波相位测量值发送给流动站,让其自身求出差分修正量,从而实现三维定位;
前者为准RTK技术,后者为真正的RTK技术。
审核编辑 黄宇
-
剖析三星七频无人机天线搭配差分GPS模块精准定位定向2016-05-26 4086
-
一文看懂GPS模块定位原理、特点及应用2017-07-13 4501
-
北斗定位、GPS定位、WiFi定位、基站定位、蓝牙定位几种定位方式比较2017-11-15 9320
-
介绍一种GPS/GSM远程定位技术2021-05-25 1398
-
介绍一种差分串行接口方案2021-06-01 1656
-
怎样去设计一种差分放大电路2021-09-30 2304
-
什么是GPS差分模式2010-01-29 1487
-
GPS差分定位基本原理2012-11-17 1792
-
一种新颖的差分走线方式2020-12-26 1253
-
GPS/北斗RTK差分定位系统的原理以及应用领域2023-08-04 3606
-
“高精度”定位技术RTK,仅仅是差分GPS吗?2023-08-28 3185
-
一文弄懂北斗RTK差分高精度定位技术原理2024-07-30 4950
-
化工厂室外GPS 北斗RTK差分人员定位系统解决方案2024-08-02 1391
-
一文弄懂实时动态载波相位差分技术和伪距差分技术的区别2024-09-13 3081
-
GPS/北斗RTK差分定位系统的技术原理以及应用领域2024-09-27 4522
全部0条评论

快来发表一下你的评论吧 !
