

几种车辆检测技术的简介与比较
汽车防盗与安全
描述
随着科学技术的进步,汽车检测诊断技术也飞速发展,传统的检测方法已不能满足现代汽车检测需要,其它领域新技术的发展渗透也促进了汽车检测设备与手段的发展更新。目前人们已能依靠各种先进仪器设备,对汽车进行综合检测诊断,而且具有自动控制检测过程,自动采集检测数据等功能,使检测诊断过程更安全、更快捷、更准确。使用现代仪器设备诊断技术是汽车检测与诊断技术发展的必然趋势。汽车检测技术是伴随着汽车技术的发展而发展的。随着现代科学技术的进步,特别是计算机技术的进步,汽车检测技术也飞速发展。目前人们能依靠各种先进的仪器设备,对汽车进行不解体检测,而且安全、迅速、可靠。汽车综合性能检测就是在汽车使用、维护和修理中对汽车的技术状况进行测试和检验的一门技术。
智能交通系统(Intelligent Transportation Systems,ITS)在我国得到了广泛应用。车辆检测是智能交通系统的组成部分,通过车辆检测方式采集有效的道路交通信息,获得交通流量、车速、道路占有率、车间距、车辆类型等基础数据,有目的地实现监测、控制、分析、决策、调度和疏导。目前,车辆检测器的种类很多,如有线圈检测、视频检测、微波检测、激光检测、声波检测、超声波检测、磁力检测、红外线检测等。
线圈检测方式
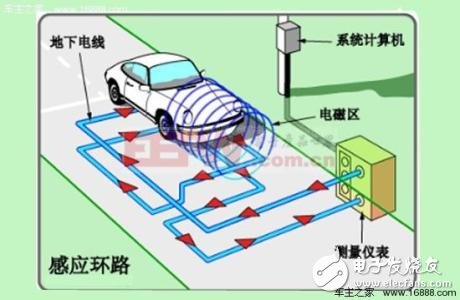
通过一个电感器件即环形线圈与车辆检测器构成一个调谐电子系统,当车辆通过或停在线圈上会改变线圈的电感量,激发电路产生一个输出,从而检测到通过或停在线圈上的车辆。
线圈检测技术成熟、易于掌握、计数非常精确、性能稳定。
缺点是交通流数据单一、安装过程对可靠性和寿命影响很大、修理或安装需中断交通、影响路面寿命、易被重型车辆、路面修理等损坏。另外高纬度开冻期和低纬度夏季路面以及路面质量不好的地方对线圈的维护工作量比较大的。
视频检测方式
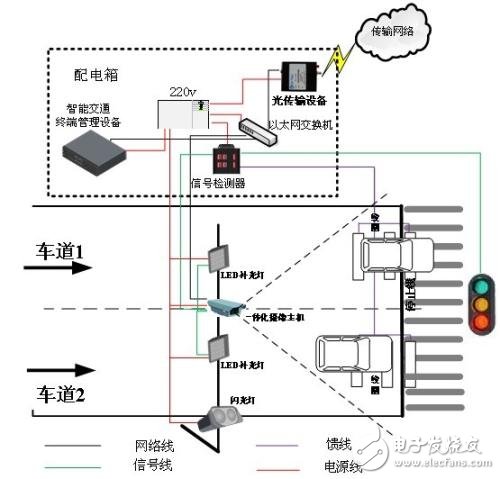
视频检测方式是一种基于视频图像分析和计算机视觉技术对路面运动目标物体进行检测分析的视频处理技术。它能实时分析输入的交通图像,通过判断图像中划定的一个或者多个检测区域内的运动目标物体,获得所需的交通数据。
该系统的优点是无需破坏路面,安装和维护比较方便,可为事故管理提供可视图像、可提供大量交通管理信息、单台摄像机和处理器可检测多车道。
它的缺点是精度不高,容易受环境、天气、照度、干扰物等影响,对高速移动车辆的检测和捕获有一定困难。因为,拍摄高速移动车辆需要有足够快的快门(至少是 1/3000S )、足够数目的像素以及好的图像检测算法的支持,视频检测由于需要进行计算往往无法捕获到高速运动物体。
微波(多卜勒)检测方式
微波式交通检测器通过发射低能量的连续频率调制微波信号,处理回波信号,可以检测出多达8个车道的车流量、道路占有率、平均车速、长车流量等交通流参数。微波检测由发射天线和发射接收器组成。发射器对检测区域发射微波,当车辆通过时,由于多普勒效应反射波会以不同的频率返回,通过检测反射波的频率来检测车辆是否通过。
优点是在恶劣气候下性能出色,可以全天候工作、可检测静止的车辆、直接检测速度、可以侧向方式检测多车道、安装维护方便。
缺点是侧面安装只能区分长车短车,相邻车道同时过车时可能漏记车辆数。雷达就是依据“多卜勒效应” 的一种微波检测方式。雷达先发出一个频率为 1000 兆赫的脉冲微波,如果微波射在静止不动的车辆上,被反射回来,它的反射波频率不会改变,仍然是 1000 兆赫。反之,如果车辆在行驶,而且速度很快,那么,根据多卜勒效应,反射波频率与发射波的频率就不相同。通过对这种微波频率微细变化的精确测定,求出频率的差异,就可以换算出汽车的速度。雷达测速有效范围大约在每小时 24 公里到 255 公里之间,测速范围比较大,精确度也相当高。对于速度较快,车流量较少且方向统一的高速公路上面,采用微波雷达配合高速摄像机是一种不错的选择。而对于多车道、车辆并行、人车混杂的复杂路段,单纯只使用多普勒效应的微波雷达对路口、路段违法车辆的进行检测,则具有较大困难,在检测范围内如果出现多个车辆,往往无法区分目标车辆。另外,测速雷达一般安装在公路中间6米高的横臂上面,如果比较高的大型车辆(如挂车、货柜车等)经过,由于车体比较高,造成车体顶部距离雷达太近,雷达发出的脉冲微波射在车体顶部被反射回来的距离大大缩短,往往造成了计算出来的速度值比较大,会产生比较大的误差。
磁力检测方式
在铁磁材料中会发生磁阻的非均质现象(AMR),当沿着一条长而且薄的铁磁合金带的长度方向施加一个电流,在垂直于电流的方向施加一个磁场。合金带自身的阻值会发生变化。利用AMR磁阻效应生产的AMR磁阻传感器成功地将三维方向(x,y,z)的单个传感器件集成在同一个芯片上,而且将传感器与调节、补偿电路集成一体化,可以很好地感测地磁范围内低于1高斯的磁场,可以根据一些铁磁物体对地磁的扰动,来检测车辆的存在,也可以根据不同车辆对地磁产生的扰动不同来识别车辆类型。
磁阻传感器的优点有:安装、维修方便,不必封闭车道、破坏路面。
缺点也非常明显,对于纵向过于靠近的车辆的干扰排除能力较差,即当车流速度较低,前后车辆之间的距离较小时对测量精度影响较大。
超声波检测方式
超声波检测的原理与雷达测速类似,都是利用 “多卜勒效应”的反射原理,发射器从顶部发出超声波,当有车辆通过时,接收器接收到回波的时间是不一样的,据此可以判断是否有车通过。与雷达测速不同的只不过其传感器探头发出的是声波而不是电磁波。
此种检测设备的缺点是必须顶臵安装,安装条件受到一定的限制,并且传感头在路口这种灰尘极大的恶劣环境中使用,寿命非常短。因此这种检测方法并不实用。
激光检测方式
激光检测为点测量行为,从理论上讲是可行的并且检测精度过程都相当高,但与微波雷达一样,同样面临路口多道路,多车辆和多行人的三多影响,点测量的效率无法满足监管要求,最重要的是:激光检测中的激光束对人体(主要是人眼的伤害)是其在使用中极为严重的问题。在欧美等国家又用激光测速的交通测速仪器,其性能指标不仅要达到国际 Class1 安全标准,同时在使用中必须用人工操控,以避免对人眼造成伤害。在日本是严格禁止用激光作交通检测设备的,因此,激光检测在理论上讲比较好,但目前在使用中的安全问题仍未解决。
红外检测方式
红外检测器是顶臵式或路侧式的交通流检测器。该检测器一般采用反射式检测技术。反射式检测器探头由一个红外发光管和一个红外接收管组成,其工作原理是由调制脉冲发生器产生调制脉冲,经红外探头向道路上辐射,当有车辆通过时,红外线脉冲从车体反射回来被探头的接收管接收,经红外解调器解调再通过选通、放大、整流和滤波后触发驱动器输出一个检测信号。
这种检测器具有快速准确、轮廓清晰的检测能力。其缺点是工作现场的灰尘、冰雾会影响系统的正常工作。
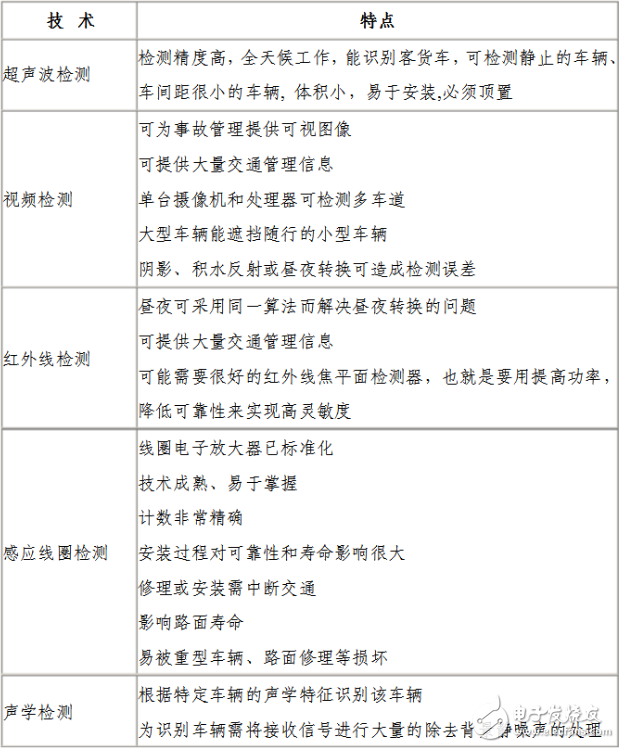
几种车辆检测技术的比较
-
交流阻抗法对几种铜缓蚀剂比较研究2021-08-31 753
-
分享一款不错的基于无线定位技术的车辆检测系统2021-05-18 1135
-
电磁式车辆检测器的原理是什么?2021-05-12 1483
-
分享关于检测前方车辆的方法2019-08-08 5554
-
几种常见的安规认证简介2017-11-29 1203
-
地磁车辆检测器的应用领域_地磁车辆检测器与其他车辆检测技术的优劣对比2017-11-13 5109
-
3D打印之几种常见技术比较2017-01-13 1178
-
常见公交车辆检测技术案例分析2012-12-26 6394
-
几种轿车润滑油比较分析2010-03-11 1306
-
几种常见传感器件简介2009-11-23 2001
-
基于视频的车辆检测技术和阴影消除方法2009-05-16 1504
-
几种模数转换技术的分析比较2009-05-14 639
全部0条评论

快来发表一下你的评论吧 !
