

linux内核rcu机制详解
嵌入式操作系统
描述
RCU(Read-Copy Update)是数据同步的一种方式,在当前的Linux内核中发挥着重要的作用。RCU主要针对的数据对象是链表,目的是提高遍历读取数据的效率,为了达到目的使用RCU机制读取数据的时候不对链表进行耗时的加锁操作。这样在同一时间可以有多个线程同时读取该链表,并且允许一个线程对链表进行修改(修改的时候,需要加锁)。RCU适用于需要频繁的读取数据,而相应修改数据并不多的情景,例如在文件系统中,经常需要查找定位目录,而对目录的修改相对来说并不多,这就是RCU发挥作用的最佳场景。
Linux内核源码当中,关于RCU的文档比较齐全,你可以在 /Documentation/RCU/ 目录下找到这些文件。Paul E. McKenney 是内核中RCU源码的主要实现者,他也写了很多RCU方面的文章。今天我们而主要来说说linux内核rcu的机制详解。
在RCU的实现过程中,我们主要解决以下问题:
1,在读取过程中,另外一个线程删除了一个节点。删除线程可以把这个节点从链表中移除,但它不能直接销毁这个节点,必须等到所有的读取线程读取完成以后,才进行销毁操作。RCU中把这个过程称为宽限期(Grace period)。
2,在读取过程中,另外一个线程插入了一个新节点,而读线程读到了这个节点,那么需要保证读到的这个节点是完整的。这里涉及到了发布-订阅机制(Publish-Subscribe Mechanism)。
3, 保证读取链表的完整性。新增或者删除一个节点,不至于导致遍历一个链表从中间断开。但是RCU并不保证一定能读到新增的节点或者不读到要被删除的节点。
宽限期
通过例子,方便理解这个内容。以下例子修改于Paul的文章。
struct foo {
int a;
char b;
long c;
};
DEFINE_SPINLOCK(foo_mutex);
struct foo *gbl_foo;
void foo_read (void)
{
foo *fp = gbl_foo;
if ( fp != NULL )
dosomething(fp-》a, fp-》b , fp-》c );
}
void foo_update( foo* new_fp )
{
spin_lock(&foo_mutex);
foo *old_fp = gbl_foo;
gbl_foo = new_fp;
spin_unlock(&foo_mutex);
kfee(old_fp);
}
如上的程序,是针对于全局变量gbl_foo的操作。假设以下场景。有两个线程同时运行 foo_ read和foo_update的时候,当foo_ read执行完赋值操作后,线程发生切换;此时另一个线程开始执行foo_update并执行完成。当foo_ read运行的进程切换回来后,运行dosomething 的时候,fp已经被删除,这将对系统造成危害。为了防止此类事件的发生,RCU里增加了一个新的概念叫宽限期(Grace period)。如下图所示:
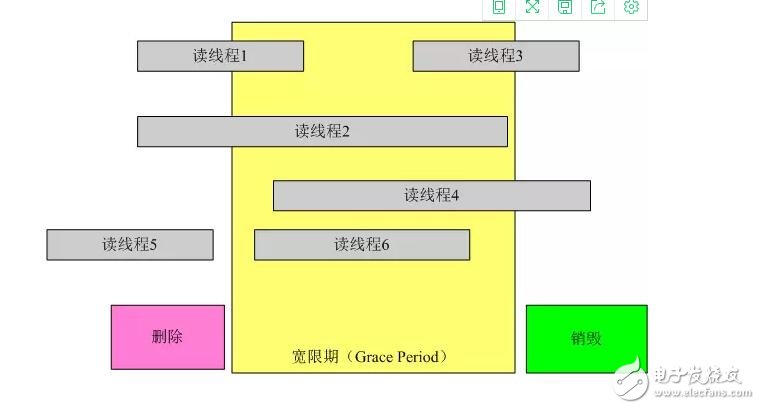
图中每行代表一个线程,最下面的一行是删除线程,当它执行完删除操作后,线程进入了宽限期。宽限期的意义是,在一个删除动作发生后,它必须等待所有在宽限期开始前已经开始的读线程结束,才可以进行销毁操作。这样做的原因是这些线程有可能读到了要删除的元素。图中的宽限期必须等待1和2结束;而读线程5在宽限期开始前已经结束,不需要考虑;而3,4,6也不需要考虑,因为在宽限期结束后开始后的线程不可能读到已删除的元素。为此RCU机制提供了相应的API来实现这个功能。
void foo_read(void)
{
rcu_read_lock();
foo *fp = gbl_foo;
if ( fp != NULL )
dosomething(fp-》a,fp-》b,fp-》c);
rcu_read_unlock();
}
void foo_update( foo* new_fp )
{
spin_lock(&foo_mutex);
foo *old_fp = gbl_foo;
gbl_foo = new_fp;
spin_unlock(&foo_mutex);
synchronize_rcu();
kfee(old_fp);
}
其中foo_read中增加了rcu_read_lock和rcu_read_unlock,这两个函数用来标记一个RCU读过程的开始和结束。其实作用就是帮助检测宽限期是否结束。
foo_update增加了一个函数synchronize_rcu(),调用该函数意味着一个宽限期的开始,而直到宽限期结束,该函数才会返回。我们再对比着图看一看,线程1和2,在synchronize_rcu之前可能得到了旧的gbl_foo,也就是foo_update中的old_fp,如果不等它们运行结束,就调用kfee(old_fp),极有可能造成系统崩溃。而3,4,6在synchronize_rcu之后运行,此时它们已经不可能得到old_fp,此次的kfee将不对它们产生影响。
宽限期是RCU实现中最复杂的部分,原因是在提高读数据性能的同时,删除数据的性能也不能太差。
订阅——发布机制
当前使用的编译器大多会对代码做一定程度的优化,CPU也会对执行指令做一些优化调整,目的是提高代码的执行效率,但这样的优化,有时候会带来不期望的结果。如例:
void foo_update( foo* new_fp )
{
spin_lock(&foo_mutex);
foo *old_fp = gbl_foo;
new_fp-》a = 1;
new_fp-》b = ‘b’;
new_fp-》c = 100;
gbl_foo = new_fp;
spin_unlock(&foo_mutex);
synchronize_rcu();
kfee(old_fp);
}
这段代码中,我们期望的是6,7,8行的代码在第10行代码之前执行。但优化后的代码并不对执行顺序做出保证。在这种情形下,一个读线程很可能读到 new_fp,但new_fp的成员赋值还没执行完成。当读线程执行dosomething(fp-》a, fp-》b , fp-》c ) 的 时候,就有不确定的参数传入到dosomething,极有可能造成不期望的结果,甚至程序崩溃。可以通过优化屏障来解决该问题,RCU机制对优化屏障做了包装,提供了专用的API来解决该问题。这时候,第十行不再是直接的指针赋值,而应该改为 :
rcu_assign_pointer(gbl_foo,new_fp);
rcu_assign_pointer的实现比较简单,如下:
#define rcu_assign_pointer(p, v) \
__rcu_assign_pointer((p), (v), __rcu)
#define __rcu_assign_pointer(p, v, space) \
do { \
smp_wmb(); \
(p) = (typeof(*v) __force space *)(v); \
} while (0)
我们可以看到它的实现只是在赋值之前加了优化屏障 smp_wmb来确保代码的执行顺序。另外就是宏中用到的__rcu,只是作为编译过程的检测条件来使用的。
在DEC Alpha CPU机器上还有一种更强悍的优化,如下所示:
void foo_read(void)
{
rcu_read_lock();
foo *fp = gbl_foo;
if ( fp != NULL )
dosomething(fp-》a, fp-》b ,fp-》c);
rcu_read_unlock();
}
第六行的 fp-》a,fp-》b,fp-》c会在第3行还没执行的时候就预先判断运行,当他和foo_update同时运行的时候,可能导致传入dosomething的一部分属于旧的gbl_foo,而另外的属于新的。这样导致运行结果的错误。为了避免该类问题,RCU还是提供了宏来解决该问题:
#define rcu_dereference(p) rcu_dereference_check(p, 0)
#define rcu_dereference_check(p, c) \
__rcu_dereference_check((p), rcu_read_lock_held() || (c), __rcu)
#define __rcu_dereference_check(p, c, space) \
({ \
typeof(*p) *_________p1 = (typeof(*p)*__force )ACCESS_ONCE(p); \
rcu_lockdep_assert(c, “suspicious rcu_dereference_check()” \
“ usage”); \
rcu_dereference_sparse(p, space); \
smp_read_barrier_depends(); \
((typeof(*p) __force __kernel *)(_________p1)); \
})
static inline int rcu_read_lock_held(void)
{
if (!debug_lockdep_rcu_enabled())
return 1;
if (rcu_is_cpu_idle())
return 0;
if (!rcu_lockdep_current_cpu_online())
return 0;
return lock_is_held(&rcu_lock_map);
}
这段代码中加入了调试信息,去除调试信息,可以是以下的形式(其实这也是旧版本中的代码):
#define rcu_dereference(p) ({ \
typeof(p) _________p1 = p; \
smp_read_barrier_depends(); \
(_________p1); \
})
在赋值后加入优化屏障smp_read_barrier_depends()。
我们之前的第四行代码改为 foo *fp = rcu_dereference(gbl_foo);,就可以防止上述问题。
数据读取的完整性
还是通过例子来说明这个问题:
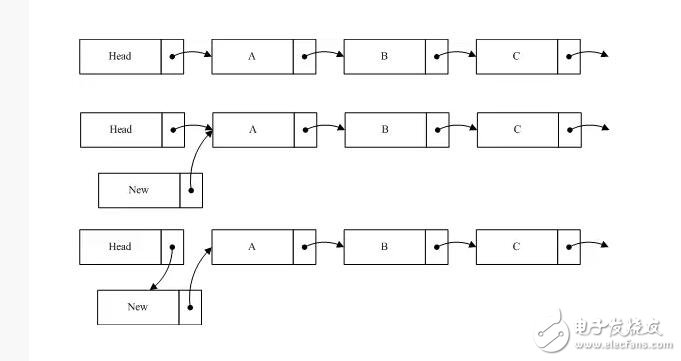
如图我们在原list中加入一个节点new到A之前,所要做的第一步是将new的指针指向A节点,第二步才是将Head的指针指向new。这样做的目的是当插入操作完成第一步的时候,对于链表的读取并不产生影响,而执行完第二步的时候,读线程如果读到new节点,也可以继续遍历链表。如果把这个过程反过来,第一步head指向new,而这时一个线程读到new,由于new的指针指向的是Null,这样将导致读线程无法读取到A,B等后续节点。从以上过程中,可以看出RCU并不保证读线程读取到new节点。如果该节点对程序产生影响,那么就需要外部调用做相应的调整。如在文件系统中,通过RCU定位后,如果查找不到相应节点,就会进行其它形式的查找,相关内容等分析到文件系统的时候再进行叙述。
我们再看一下删除一个节点的例子:
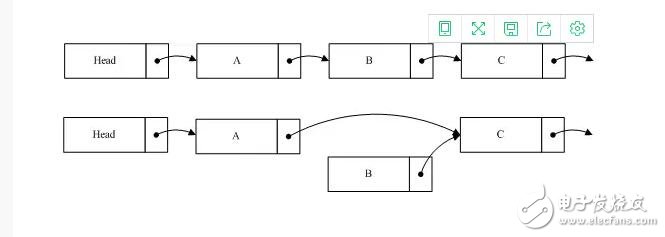
如图我们希望删除B,这时候要做的就是将A的指针指向C,保持B的指针,然后删除程序将进入宽限期检测。由于B的内容并没有变更,读到B的线程仍然可以继续读取B的后续节点。B不能立即销毁,它必须等待宽限期结束后,才能进行相应销毁操作。由于A的节点已经指向了C,当宽限期开始之后所有的后续读操作通过A找到的是C,而B已经隐藏了,后续的读线程都不会读到它。这样就确保宽限期过后,删除B并不对系统造成影响。
小结
RCU的原理并不复杂,应用也很简单。但代码的实现确并不是那么容易,难点都集中在了宽限期的检测上,后续分析源代码的时候,我们可以看到一些极富技巧的实现方式。
-
详解linux内核的uevent机制2024-09-29 3598
-
Linux内核中RCU的用法2023-12-27 3711
-
Linux内核同步机制mutex详解2023-06-26 2083
-
Linux内核RCU锁的原理与使用2022-10-13 5423
-
Linux内核文件Cache机制2021-08-31 1036
-
Linux内核GPIO操作函数的详解分析2021-01-22 1128
-
基于Linux内核源码的RCU实现方案2020-09-25 3531
-
详解Linux内核抢占实现机制2019-08-06 1807
-
可以了解并学习Linux 内核的同步机制2019-05-14 1114
-
Linux内核地址映射模型与Linux内核高端内存详解2018-05-08 3900
-
linux内核机制有哪些2017-11-14 5984
-
linux经典的rcu如何实现?2017-11-07 4543
-
《Linux设备驱动开发详解》第4章、Linux内核模块2017-10-27 1322
-
谢宝友教你学Linux:深入理解Linux RCU之从硬件说起2017-09-04 6736
全部0条评论

快来发表一下你的评论吧 !
