

奈奎斯特稳定判据的推导和理解
通信人物
描述
什么是奈奎斯特稳定判据
奈奎斯特稳定判据是根据闭环控制系统的开环频率响应判断闭环系统稳定性的准则,由美国学者H.奈奎斯特1932年所提出。控制系统在断开反馈作用后所定出的频率响应称为开环频率响应。奈奎斯特稳定判据本质上是一种图解分析方法,且开环频率响应容易通过计算或实验途径定出,所以它在应用上非常方便和直观。奈奎斯特稳定判据只能用于线性定常系统。
在经典控制理论中,奈奎斯特稳定判据主要用于分析单变量系统的稳定性。在此基础上形成的频率响应法是经典控制理论的主要分析和综合方法之一。70年代以来,奈奎斯特稳定判据已被推广应用于多变量系统(见多变量频域方法)。
奈奎斯特稳定判据的推导和理解
先上结论,奈奎斯特稳定判据:
若奈奎斯特曲线不穿过(-1 , j0)点,Z = P - 2N = 0 时系统稳定若奈奎斯特曲线穿过(-1 , j0)点,则系统临界稳定
其中,Z为包围函数的零点数
P为开环传递函数的极点数
N为奈奎斯特曲线包围(-1 , j0)的圈数
看上去挺抽象的哈,当初我就死记着定理去考试了。要了解奈奎斯特稳定判据,得谈到复变函数中的Cauchy定理,也就是辐角原理。辐角原理实际上就是画圈圈,这里不详述,请自己参照《复变函数》。
根据辐角原理,当s在不穿过零极点的闭合轨迹上顺时针运动一周时,F(s)的值在复平面上顺时针运动Z-P周(和书上表述可能有异,但这样很好理解)。
其实就是s变量沿着闭合轨迹的变化对应于F(s)值在复平面上有着相应的变化。
为什么强调顺时针呢?且看我慢慢道来,蛤蛤!
闭环传函极点实际上就等价于F(s)=1+G(s)H(s)的零点,那么稳定性判定就归结为判定F(s)的零点在复平面的右半平面的分布情况。
F(s)在复平面上的运动轨迹可由G(s)H(s)的运动轨迹向右平移1个单位长度得到;
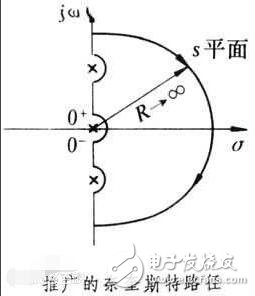
研究F(s)的零点分布,先得找个合适的s变量运动轨迹,书上采用的是两部分:
右半平面半径无穷大的半圆
虚轴本身
例外:如果原点处存在开环极点,则以半径无穷小的圆弧避开,形成类似于扇形的闭合曲线。
如果我们选取s变量的运动轨迹关于实轴对称,由复数的运算性质可知,G(s)H(s)的运动轨迹关于实轴对称,也即F(s)的运动轨迹关于实轴对称。
既然这样,我们就只需要研究:虚轴上半部对应的s变量的运动轨迹与G(s)H(s)轨迹的变化关系就好,这也是教科书上为何有R = 2 * N 的原因,下半部分的数量直接乘以2即可。
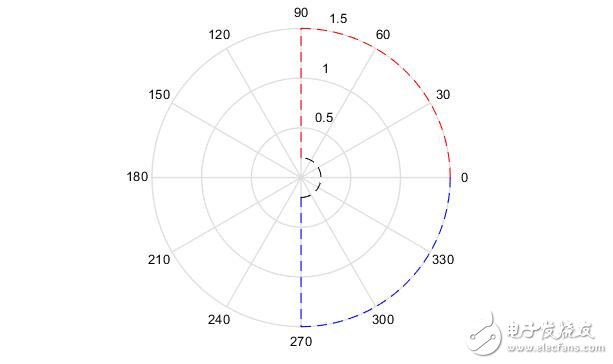
所以我们分析的就只是上图红色部分的s变量轨迹对应于G(s)H(s)的运动轨迹所绕(-1 , 0j)的圈数咯。那么,根据奈奎斯特曲线和可能存在的补线就能得出s变量的上半平面部分的运动轨迹对应的G(s)H(s)的运动“轨迹”,其实还存在于实轴对称的另一部分轨迹啦,对应于s运动轨迹的下半平面部分,也就是上图的蓝色部分。对应这个词,其实就是映射啦。
虚轴部分对应于jw,同时,使s变量运动方向为顺时针,那么对应于w是从0到无穷变化的,所以虚轴红色部分也就对应于G(s)H(s)的奈奎斯特曲线;
而对应于红色无穷大半径圆环部分在开环传函极点数大于等于零点数时,是收敛于0或者常数的
倘若开环传函存在为零的绩点,那么在原点处就会存在半径为无穷小的圆弧,如上图所示,当然画得不小,为了好看嘛。
此圆弧对应于G(s)H(s)的运动轨迹是无穷大半径的补线(当然了,未必是圆,只是为了方便想象)
那么可以得出Z - P 的值,这里还要注意奈奎斯特曲线的方向哦,顺时针或者逆时针,是影响到正负号的哦,我比较懒,就不具体指出了,留给读者自己想咯。
说到这里已经差不多啦,由奈奎斯特和可能存在的补线得到Z-P的值,就可以由P(开环传函的极点数)的值得出(F(s)=1 + G(s)H(s)的零点数,也即闭环传函的极点数)Z啦
全部0条评论

快来发表一下你的评论吧 !
