

实例讲解PIC单片机之中断程序
电子常识
描述
一、中断的基本概念
中断程序一般指中断服务程序。中断服务程序,处理器处理“急件”,可理解为是一种服务,是通过执行事先编好的某个特定的程序来完成的,这种处理“急件”的程序被称为——中断服务程序。在程序方面来说 当CPU在执行一个程序的时候,突然产生了中断事件CPU就去执行中断程序了,当执行完成后CPU又回来执行原先的程序。
当单片机正在执行程序时,出现了某些特殊状况,例如定时时间到、有键盘信号输入等,此时CPU须要暂时停止当前的程序,而转去执行处理这些事件的程序,待执行完这些特定的程序之后,再返回到原先的程序去执行,这就形成了一次“中断”。“中断”加强了单片机处理突发事件的能力,如果没有中断功能,对可能发生的特殊状况的处理就必须采用定时查询,这样就会浪费大量的CPU时间。
因此,中断是单片机中很重要的一个概念,是提高工作效率的重要功能,中断系统功能的好坏是衡量单片机功能的重要指标。单片机的“中断源”与单片机包含的外围设备有很大的关系,所谓“中断源”就是引起中断的原因或根源,就是中断请求的来源。16F873/876内部集成了12个外围设备。
外围设备在工作过程中,都需要CPU参与控制、协调或交换数据等服务,而CPU正是通过中断技术使得这些外围设备协调工作的。PIC单片机作一次中断处理的过程如下,当某一中断源发出中断请求时:
①假如CPU正在执行更重要的任务,则可采用屏蔽的方法暂时不响应该中断请求;
②如果可以响应该中断请求,则CPU执行完当前指令后,必须把断点处的程序计数器PC的值(即下一条指令的地址)压入堆栈保存起来(断点保护),也可以把一些的重要寄存器内容也保护起来(现场保护)。然后再转移到相应的中断服务子程序中执行。
③在中断服务子程序中,首先必须确定发出中断请求的中断源,然后再跳转到与该中断源相对应的程序分支中去执行中断服务程序。
④当中断服务程序执行毕后,必须先恢复被保护的寄存器的值(现场恢复),再将程序计数器PC的值从堆栈中恢复(断点恢复) ,使CPU返回断点处继续执行被中断的程序。
二、中断处理过程
(1)保护被中断进程现场。为了在中断处理结束后能够使进程准确地返回到中断点,系统必须保存当前处理机程序状态字PSW和程序计数器PC等的值。
(2)分析中断原因,转去执行相应的中断处理程序。在多个中断请求同时发生时,处理优先级最高的中断源发出的中断请求。
(3)恢复被中断进程的现场,CPU继续执行原来被中断的进程。
三、中断的运用
1、设置中断相关寄存器。这里包含了中断源的方式(高、低、下降沿、上升沿),优先级等,最后得开启当前的中断(可能有多个中断),开启总中断。设置完后,有中断信号到来后,CPU就会处理了,自动跳转到中断里去。
2、中断服务函数。也就是CPU跳到中断去,你想让单片机干什么。比如之前的例子,开门后,看是小广告,我们不要,那关门。中断服务函数就这样,就是单片机跳过去需要处理的事情,一般是要求时效性的,紧急的事。
3、中断嵌套。等会用一般的中断后,再理解嵌套就简单了。
四、PIC16F876的中断源
PIC16F876单片机具备的中断源如下表所示:
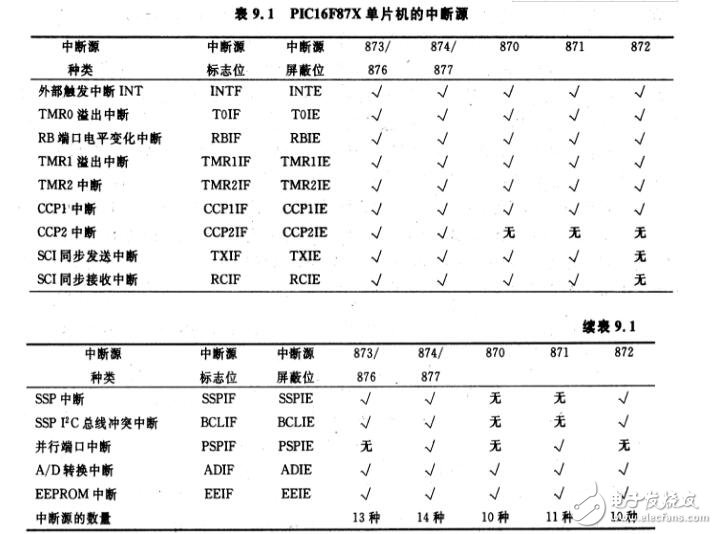
从上表可看出,各中断源基本上都与各个外围设备模块相对应的:多数的外围设备对应着一个中断源(如定时/计数器TMR0),也有的外围设备对应二个中断源(如SCI同步/异步接收/发送器USART);有的外围设备没有中断源与之对应(如输入/输出端口 RA和RC);也有的中断源没有外围设备与之对应(例如外部中断源INT)。
每一种中断源对应了一个中断标志位,记为XXXF,以及一个中断屏蔽位或叫中断使能位,记为XXXE。中断源产生的中断信号能否到达CPU,都受控于相应的中断屏蔽位。 每个中断源申请中断时,其中断标志位会自动置位,中断标志位的清0是由用户程序完成的;而每个中断屏蔽位的置位和清位均由用户程序完成。
PIC16F876单片机的中断系统的逻辑电路如图:
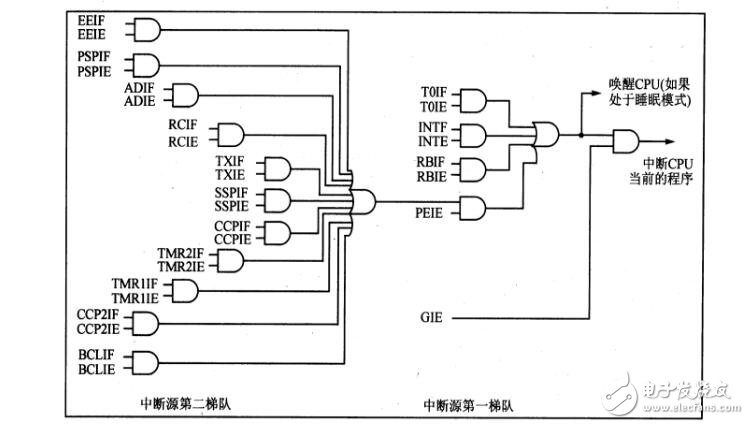
图中全部的的14个中断源按两个梯队并列排开,第一梯队中只安排了3个中断源,其余的中断源全部安排到第二梯队中。所有的中断源都受“全局中断屏蔽位”(也称总屏蔽位)GIE的控制;第一梯队的中断源不仅受GIE的控制,还要受各自中断屏蔽位的控制;第二梯队的中断源不仅受到GIE和各自中断屏蔽位的控制,还要受到一个外设中断屏蔽位PEIE的控制。
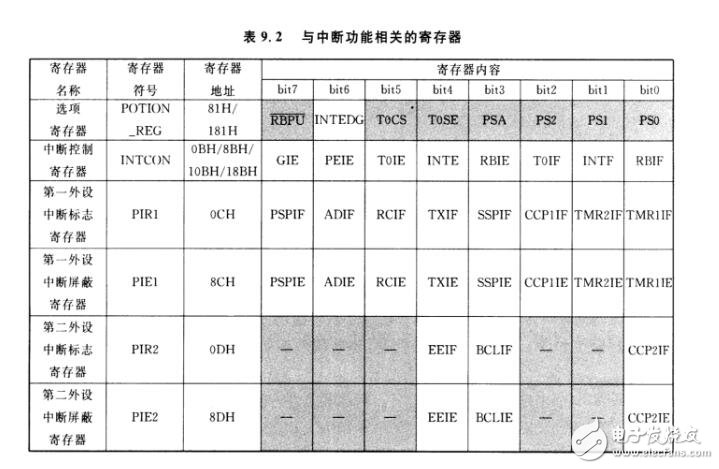
五、中断相关的寄存器
与中断有关的特殊功能寄存器SFR共有6个,分别是:
选项寄存器OPTION_REG、中断控制寄存器INTCON、第一外围设备中断标志寄存器PIR1、第一外围设备中断屏蔽寄存器PIE1(也称中断使能寄存器)、第二外围设备中断标志寄存器PIR2和第二外围设备中断屏蔽寄存器PIE2。
后5个SFR,共有40位,但仅使用了30位来控制中断,分别与图中的中断逻辑电路输入信号成严格的对应关系。
1、选项寄存器OPTION _REG
该寄存器包含了与定时/计数器TMR0、分频器和端口RB有关的控制位。RB端口引脚RB0和外部中断INT复用一脚,与该脚有关的一个控制位含义如下:
INTEDG:外部中断INT触发信号边沿选择位:1=选择RB0/INT上升沿触发;0=选择RB0/INT下降沿触发。

2、中断控制寄存器INTCON

它将第一梯队中的3个中断源的标志位和屏蔽位,以及PEIE和GIE包含在其中:
RBIF:端口RB的引脚RB4~RB7电平变化中断标志位。1=RB4~RB7已经发生了电平变化;0=RB4~RB7尚未发生电平变化。
RBIE:端口RB的引脚RB4~RB7电平变化中断屏蔽位。1=允许RB产生的中断;0=屏蔽端口RB产生的中断。
INTF:外部INT引脚中断标志位。1=外部INT引脚有中断触发信号; 0=外部INT引脚无中断触发信号。
INTE:外部INT引脚中断屏蔽位。 l=允许外部INT引脚产生的中断;0=屏蔽外部INT引脚产生的中断。
T0IF:TMR0溢出中断标志位。1=TMR0已经发生了溢出;0=TMR0尚未发生溢出。
T0IE:TMR0溢出中断屏蔽位。1=允许TMR0溢出后产生的中断; 0=屏蔽TMR0溢出后产生的中断。
PEIE:外设中断屏蔽位。1=允许CPU响应来自第二梯队中断请求0=禁止CPU响应来自第二梯队中断请求。
GIE:全局中断屏蔽位(总屏蔽位)。1=允许CPU响应所有中断源产生的中断请求;0=禁止CPU响应所有中断源产生的中断请求。
3、 第一外围设备中断标志寄存器PIR1

该寄存器中各中断标志位的含义如下:
TMR1IF:定时/计数器TMR1模块溢出中断标志位。1=发生了TMR1溢出; 0=未发生TMR1溢出。
TMR2IF:定时/计数器TMR2模块溢出中断标志位。1=发生了TMR2溢出; 0=未发生TMR2溢出。
CCP1IF:输入捕捉/输出比较/脉宽调制CCP1模块中断标志位。 输入捕捉模式下:1=发生了捕捉中断请求;0=未发生捕捉中断请求。输出比较模式下:1=发生了比较输出中断请求;0=未发生比较输出中断请求。脉宽调制模式下: 无用。
SSPIF:同步串行端口(SSP)中断标志位。1=发送/接收完毕产生的中断请求;0=等待发送/接收。
TXIF:串行通信接口(SCI)发送中断标志位。1=发送完成,即发送缓冲区空 0=正在发送,即发送缓冲区未空。
RCIF:串行通信接口(SCI)接收中断标志位。1=接收完成,即接收缓冲区满0=正在接收,即接收缓冲区空。
ADIF:模拟/数字(A/D)转换中断标志位。1=发生了A/D转换中断;0=未发生A/D转换中断。
PSPIF:并行端口中断标志位,只有40脚封装型号具备,对于28脚封装型号总保持0。1=并行端口发生了读/写中断请求;0=并行端口未发生读/写中断请求。
4、 第一外围设备中断屏蔽寄存器PIE1

该寄存器中包含的中断屏蔽位(使能位)的含义如下:
TMR1IE:定时器/计数器TMRl模块溢出中断屏蔽位。l=开放TMRl溢出发生中断;0=屏蔽TMRl溢出发生中断。
TMR2IE:定时/计数器TMR2溢出中断屏蔽位。1=开放TMR2溢出发生的中断;0=屏蔽TMR2溢出发生的中断。
CCP1IE:输入捕捉/输出比较/脉宽调制CCP1模块中断屏蔽位。1=开放CCP1模块产生的中断请求;0=屏蔽CCP1模块产生的中断请求。
SSPIE:同步串行端口(SSP)中断屏蔽位。1=开放SSP模块产生的中断请求0=屏蔽SSP模块产生的中断请求。
TXIE:串行通信接口(SCI)发送中断屏蔽位。1=开放SCI发送中断请求;0=屏蔽SCI发送中断请求。
RCIE:串行通信接口(SCI)接收中断屏蔽位。1=开放SCI接收中断请求;0=屏蔽SCI接收中断请求。
ADIE:模拟/数字(A/D)转换中断屏蔽位。1=开放A/D转换器的中断请求;0=屏蔽A/D转换器的中断请求。
PSPIE:并行端口中断屏蔽位,只有40脚封装型号具备,对于28脚封装型号总保持0。1=开放并行端口读/写发生的中断请求;0=屏蔽并行端口读/写发生的中断请求。
5、 第二外围设备中断标志寄存器PIR2

CCP2IF:输入捕捉/输出比较/脉宽调制CCP2模块中断标志位。输入捕捉模式下:1=发生了捕捉中断请求(必须用软件清0);0=未发生捕捉中断请求。输出比较模式下:1=发生了比较输出中断请求(必须用软件清0);0=未发生比较输出中断请求。脉宽调制模式下:无用
BCLIF:I2C总线冲突中断标志。当同步串行端口MSSP被配置成I2C总线的主控器模式时:1=发生了总线冲突;0=未发生总线冲突。
EEIF:EEPROM写操作中断标志位。1=写操作已经完成(必须用软件清0);0=写操作未完成或尚未开始进行。
6、 第二外围设备中断屏蔽寄存器PIE2

CCP2IE:输入捕捉/输出比较/脉宽调制CCP2模块中断屏蔽位。1=开放CCP2模块产生的中断请求;
0=屏蔽CCP2模块产生的中断请求。
EEIE:EEPROM写操作中断屏蔽位。1=开放EEPROM写操作产生的中断请求;0=屏蔽EEPROM写操作产生的中断请求。
六、PIC单片机timer中断实例
功能描述: Timer0实现1s定时,RD低四位取反控制LED低四位,Timer1实现0.5s定时,RD高四位取反控制LED高四位
维护记录: 2011-8-22
***************************************************************************************************/
#include 《pic.h》 //头文件在HI-TECH安装目录下\HI-TECH Software\PICC\std\9.60\include
#define uchar unsigned char
#define uint unsigned int
uint temp1,temp2;
//***********************************************************************************
//延时
//***********************************************************************************
void delay(uint time)
{
uint i,j;
for(i = 0;i 《 time; i++)
{
for(j = 0;j 《 30; j++);
}
}
//***********************************************************************************
//IO初始化操作
//***********************************************************************************
void IO_init(void)
{
TRISD=0x00; //RD设置为输出
PORTD=0xff; //初始化为高
}
//***********************************************************************************
//timer0初始化
//***********************************************************************************
void timer0_init(void) //fosc/4=4M/4所以计数周期为1us
{
T0CS=0; //timer0工作于定时器方式
PSA=1; //timer0不分频
T0IF=0; //清timer0中断标志
T0IE=1; //timer0中断允许
TMR0=0xAA; /*置初值,定时100us。因为写入TMR0后接着的两个周期不能增量,
中断需要3个周期的响应时间,以及C语言自动进行现场保护要消
耗周期,取修正值15,所以只需要定时100-15=85us
初值=255-85=0xaa*/
GIE=1; //开总中断
}
//***********************************************************************************
//timer1初始化
//***********************************************************************************
void timer1_init(void) //fosc/4=4M/4所以计数周期为1us
{
T1CON=0X01; //16位定时方式
TMR1IF=0; //清timer1中断标志
TMR1IE=1; //timer1中断允许
TMR1H=0xFC; /*置初值,TMR1每1ms中断一次。因为写入TMR1后接着的两个周期不能增量,
中断需要3个周期的响应时间,以及C语言自动进行现场保护要消
耗周期,取修正值15,所以只需要定时1000-15=985us
初值=65535-985=0xFC26*/
TMR1L=0x26;
PEIE=1; //允许外围中断
GIE=1; //开总中断
}
//*************************************************
**********************************
//中断服务子程序
//***********************************************************************************
void interrupt ISR(void)
{
// Timer0 interrupt service routine
if(TMR0IF==1)
{
TMR0=0xAA; //每100us中断一次对TMR0写入一个调整值。
T0IF=0; //清timer0中断标志
temp1++; //中断次数加1
if(temp1》9999) //中断10000次后,为1秒
{
temp1=0; //中断次数清0
RD0=!RD0;RD1=!RD1; RD2=!RD2; RD3=!RD3;//取反控制RD低4位LED发光或熄灭
}
}
// Timer1 interrupt service routine
if(TMR1IF==1)
{
TMR1H=0XFC; //中断一次对TMR1写入一个调整值。
TMR1L=0x26;
TMR1IF=0; //清timer1中断标志
temp2++; //中断次数加1
if(temp2》499) //中断500次后,为0.5秒
{
temp2=0; //中断次数清0
RD4=!RD4; RD5=!RD5; RD6=!RD6; RD7=!RD7; //取反控制RD高4位LED发光或熄灭
}
}
}
//***********************************************************************************
//主函数
//***********************************************************************************
main()
{
__CONFIG(XT&WDTDIS&LVPDIS); //配置,设置为晶振XT方式振荡,禁看门狗,禁低电压编程
IO_init(); //IO初始化
timer0_init(); //定时器0初始化
timer1_init(); //定时器1初始化
while(1); //死循环
}
//******************************************程序结束*****************************************
-
pic单片机汇编程序实例2023-12-14 3299
-
PIC单片机C语言程序设计实例及源代码2022-04-20 1184
-
51单片机之中断2021-11-20 1150
-
8086汇编4位bcd码_pic单片机编程串烧,pic单片机汇编语言讲解上篇2021-11-16 1020
-
PIC单片机定时器的外设中断的使用程序免费下载2019-07-31 1103
-
PIC单片机之I2C(从模式)实例讲解2017-01-24 900
-
中断系统讲解_田老师的PIC单片机教案62016-09-01 740
-
PIC单片机C语言程序设计实例精粹2016-01-15 1123
-
PIC单片机学习知识之程序设计(二)2012-06-27 6479
-
PIC单片机循环程序实例2011-04-26 3443
-
学单片机之中断部分部分2010-02-10 1115
-
PIC单片机引脚中断程序的设计技巧2009-10-30 1712
-
用PIC单片机实现音乐播放的实例程序2009-01-16 2413
全部0条评论

快来发表一下你的评论吧 !
