

单片机和ADC0832的AD模数转换
电子常识
描述
模拟信号只有通过A/D转化为数字信号后才能用软件进行处理,这一切都是通过A/D转换器(ADC)来实现的。与模数转换相对应的是数模转换,数模转换是模数转换的逆过程,在一般的工业应用系统中传感器把非电量的模拟信号变成与之对应的模拟信号,然后经模拟(Analog)到数字(Digital)转换电路将模拟信号转成对应的数字信号送微机处理。这就是一个完整的信号链,模拟到数字的转换过程就是我们经常接触到的ADC电路。
模数转换原理:
ADC的转换原理根据ADC的电路形式有所不同。 ADC电路通常由两部分组成,它们是:采样、保持电路和量化、编码电路。其中量化、编码电路是最核心的部件,任何ADC转换电路都必须包含这种电路。 ADC电路的形式很多,通常可以并为两类:
间接法:它是将采样-保持的模拟信号先转换成与模拟量成正比的时间或频率,然后再把它转换为数字量。这种通常是采用时钟脉冲计数器,它又被称为计数器式。它的工作特点是:工作速度低,转换精度高,抗干扰能力强。
直接法:通过基准电压与采样-保持信号进行比较,从而转换为数字量。它的工作特点是:工作速度高,转换精度容易保证。
模数转换的过程:
有四个阶段,即采样、保持、量化和编码。
采样是将连续时间信号变成离散时间信号的过程。经过采样,时间连续、数值连续的模拟信号就变成了时间离散、数值连续的信号,称为采样信号。采样电路相当于一个模拟开关,模拟开关周期性地工作。理论上,每个周期内,模拟开关的闭合时间趋近于0。在模拟开关闭合的时刻(采样时刻),我们就“采”到模拟信号的一个“样本”。
量化是将连续数值信号变成离散数值信号的过程。理论上,经过量化,我们就可以将时间离散、数值连续的采样信号变成时间离散、数值离散的数字信号。
我们知道,在电路中,数字量通常用二进制代码表示。因此,量化电路的后面有一个编码电路,将数字信号的数值转换成二进制代码。
然而,量化和编码总是需要一定时间才能完成,所以,量化电路的前面还要有一个保持电路。保持是将时间离散、数值连续的信号变成时间连续、数值离散信号的过程。在量化和编码期间,保持电路相当于一个恒压源,它将采样时刻的信号电压“保持”在量化器的输入端。虽然逻辑上保持器是一个独立的单元,但是,工程上保持器总是与采样器做在一起。两者合称采样保持器。
八位串行A/D转换器ADC0832简介:
ADC0832 是美国国家半导体公司生产的一种8 位分辨率、双通道A/D转换芯片。由于它体积小,兼容性强,性价比高而深受单片机爱好者及企业欢迎,其目前已经有很高的普及率。ADC083X是市面上常见的串行模—数转换器件系列。ADC0831、ADC0832、ADC0834、ADC0838是具有多路转换开关的8位串行I/O模—数转换器,转换速度较高(转换时间32uS),单电源供电,功耗低(15mW),适用于各种便携式智能仪表。本章以ADC0832为例,介绍其使用方法。
ADC0832是8脚双列直插式双通道A/D转换器,能分别对两路模拟信号实现模—数转换,可以用在单端输入方式和差分方式下工作。ADC0832采用串行通信方式,通过DI 数据输入端进行通道选择、数据采集及数据传送。8位的分辨率(较高分辨可达256级),可以适应一般的模拟量转换要求。其内部电源输入与参考电压的复用,使得芯片的模拟电压输入在0~5V之间。具有双数据输出可作为数据校验,以减少数据误差,转换速度快且稳定性能强。独立的芯片使能输入,使多器件挂接和处理器控制变的更加方便。
ADC0832特点:
· 8位分辨率;
· 双通道A/D转换;
· 输入输出电平与TTL/CMOS相兼容;
· 5V电源供电时输入电压在0~5V之间;
· 工作频率为250KHZ,转换时间为32μS;
· 一般功耗仅为15mW;
· 8P、14P—DIP(双列直插)、PICC 多种封装;
· 商用级芯片温宽为0°C to +70°C,工业级芯片温宽为-40°C to +85°C;
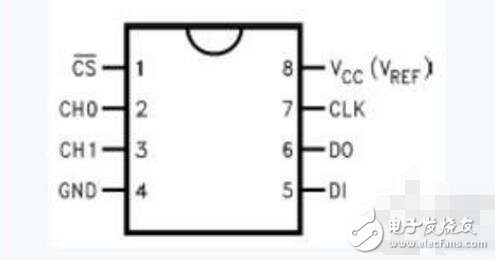
ADC0832引脚图
芯片接口说明:
· CS_ 片选使能,低电平芯片使能。
· CH0 模拟输入通道0,或作为IN+/-使用。
· CH1 模拟输入通道1,或作为IN+/-使用。
· GND 芯片参考零电位(地)。
· DI 数据信号输入,选择通道控制。
· DO 数据信号输出,转换数据输出。
· CLK 芯片时钟输入。
· Vcc/REF 电源输入及参考电压输入(复用)
ADC0832的工作原理:
正常情况下ADC0832 与单片机的接口应为4条数据线,分别是CS、CLK、DO、DI。但由于DO端与DI端在通信时并未同时使用并与单片机的接口是双向的,所以在I/O口资源紧张时可以将DO和DI并联在一根数据线上使用。当ADC0832未工作时其CS输入端应为高电平,此时芯片禁用,CLK 和DO/DI 的电平可任意。当要进行A/D转换时,须先将CS使能端置于低电平并且保持低电平直到转换完全结束。此时芯片开始转换工作,同时由处理器向芯片时钟(CLK)输入端输入时钟脉冲,DO/DI端则使用DI端输入通道功能选择的数据信号。在一个时钟脉冲的下沉之前DI端必须是高电平,表示启始信号。在第二、三个脉冲下沉之前DI端应输入两位数据用于选择通道功能。
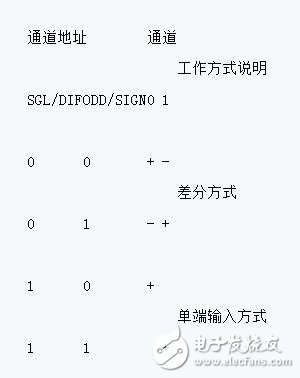
表1:通道地址设置表
如表1所示,当此两位数据为“1”、“0”时,只对CH0 进行单通道转换。当2位数据为“1”、“1”时,只对CH1进行单通道转换。当两位数据为“0”、“0”时,将CH0作为正输入端IN+,CH1作为负输入端IN-进行输入。当两位数据为“0”、“1”时,将CH0作为负输入端IN-,CH1 作为正输入端IN+进行输入。到第三个脉冲的下降之后DI端的输入电平就失去输入作用,此后DO/DI端则开始利用数据输出DO进行转换数据的读取。从第4个脉冲下降沿开始由DO端输出转换数据最高位Data7,随后每一个脉冲的下降沿DO端输出下一位数据。直到第11个脉冲时发出最低位数据Data0,一个字节的数据输出完成。也正是从此位开始输出下一个相反字节的数据,即从第11个字节的下降沿输出Data0。随后输出8位数据,到第19 个脉冲时数据输出完成,也标志着一次A/D转换的结束。最后将CS置高电平禁用芯片,直接将转换后的数据进行处理就可以了。时序说明请参照图4。
作为单通道模拟信号输入时ADC0832的输入电压是0—5V且8位分辨率时的电压精度为19.53mV,即(5/256)V。如果作为由IN+与IN-输入的输入时,可是将电压值设定在某一个较大范围之内,从而提高转换的宽度。但值得注意的是,在进行IN+与IN-的输入时,如果IN-的电压大于IN+的电压则转换后的数据结果始终为00H。
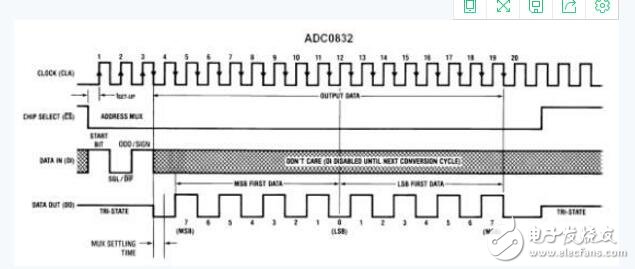
ADC0832的工作时序
ADC0832软硬件设计实例
通过以上的理论学习之后,对模—数转换应该有了一定的了解,接下来就根据上文的指导,对ADC0832进行实际应用,以加深印象。本实例功能是将通道1上采样到的电压显示在LED数码管上,通过改变通道1的输入电压变化,观察输出读数。
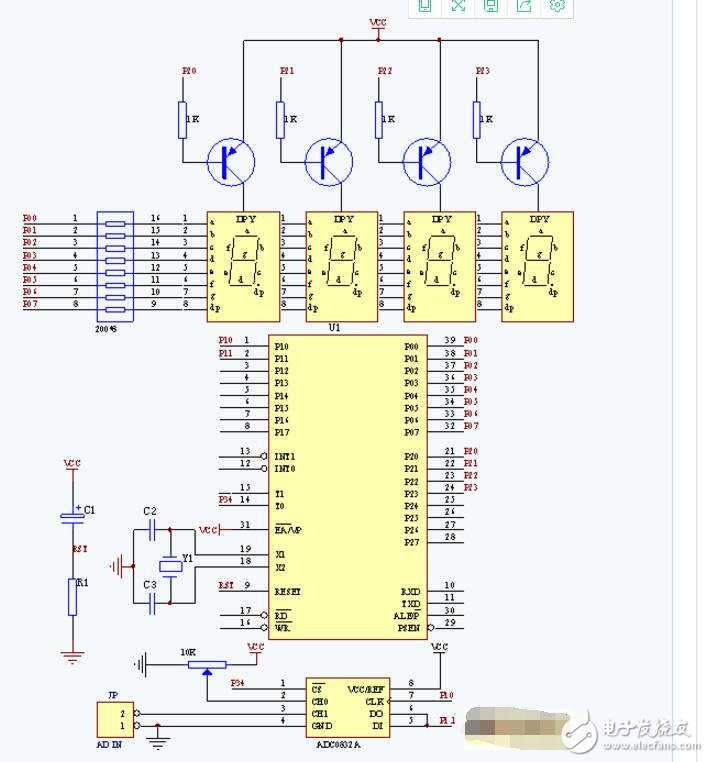
硬件原理图
软件流程图
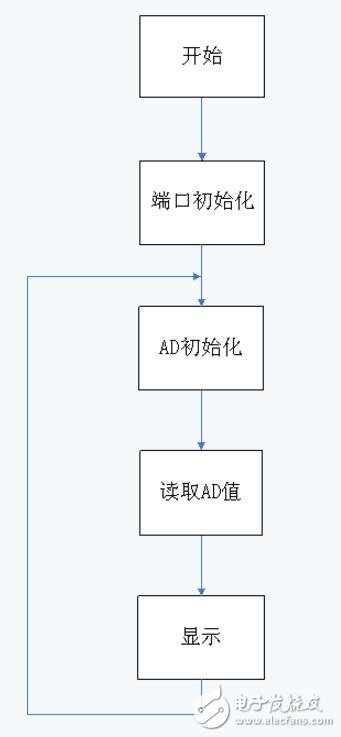
STC单片机的相关程序:
#include //定义的 系统头文件和全局变量
#include
#define uchar unsigned char
#define uint unsigned int
#define DogReset() WDT_CONTR=0x35
// T1 定时 0.1ms.作为系统计时用,
#define vT01ms 2
#define vT10ms 10
#define vT100ms 10
#define vT01S 100 // 1 s = 10 ms * 100
#define vT0HVal 0xfe //0xff //0xfe //0xf6
#define vT0LVal 0x33 //0x9c //0x0c //0x4c
uchar code display_AD_channel_ID[2] = {0x00,0x01};
static unsigned char data CS;
uchar data AD_channel_result[2][5]; //各通道A/D转换结果。前是通道号;后是转换的值
uint cT01ms;
uchar cT10ms;
uchar cT100ms;
uchar cT01s;
uchar THTL;
bit OutFlag;
void delay_ms(register uint Count){
register uchar T;
for(;Count》0;Count--){
for(T=0;T《80;T++){
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
}
DogReset();
}
}
void send_char_com(unsigned char OutData){
SBUF = OutData; //输出字符
while(!TI); //空语句判断字符是否发完
TI = 0; //清TI
}
void send_string_com(uchar *str,uchar strlen){
uchar i;
for(i=strlen; i》0; i--){
send_char_com(*str);
str++;
DogReset();
}
}
uchar Ad_Change(uchar channel){
uint AD_Result_Temp = 0 ;
//---------------------将P1.0--P1.1设置成适合AD转换的模式
/// P1 = 0xff; //将P1口置高,为A/D转换作准备
ADC_CONTR = ADC_CONTR|0x80; //1000,0000打开A/D转换电源
P1M0 = 0x03; //0000,0011用于A/D转换的P1.x口,先设为开漏
P1M1 = 0x03; //0000,0011P1.0--P1.1先设为开漏。断开内部上拉电阻
delay_ms(20); //20
ADC_CONTR = ADC_CONTR&0xE0; //1110,0000 清ADC_FLAG,ADC_START位和低3位
ADC_CONTR = ADC_CONTR|(display_AD_channel_ID[channel]&0x07); //设置当前通道号
delay_ms(1); //延时使输入电压达到稳定
ADC_DATA = 0; //清A/D转换结果寄存器
ADC_LOW2 = 0;
ADC_CONTR = ADC_CONTR|0x08; //0000,1000ADCS = 1,启动转换
do { DogReset();}
while((ADC_CONTR & 0x10)==0); //0001,0000等待A/D转换结束
ADC_CONTR = ADC_CONTR&0xE7; //1110,0111清ADC_FLAG位,停止A/D转换
AD_Result_Temp = ((AD_Result_Temp|ADC_DATA)《《2)|(ADC_LOW2&0x03);
//保存返回AD转换的 结果
//----------------------------转换成可由串口显示的字符
AD_channel_result[channel][0] = AD_Result_Temp/1000+0x30;
AD_channel_result[channel][1] = (AD_Result_Temp%1000)/100+0x30;
AD_channel_result[channel][2] = (AD_Result_Temp%100)/10+0x30;
AD_channel_result[channel][3] = AD_Result_Temp%10+0x30;
//------------------------串口监视
// send_char_com(ADC_DATA); //////发送转换 的 到的 值,这里只是 高8位,值的转换需要考虑
// send_char_com(ADC_LOW2); //////发送转换 的 到的 值,这里只是 低2位,值的转换需要考虑
// send_string_com(AD_channel_result[channel],4);
delay_ms(10); //
return(ADC_DATA);
}
uchar AD_Filter(void){
uchar i;
uchar cTemp[32];
uchar cAverage;
for(i=32;i》0;i--){
cTemp[i]=Ad_Change(0);
cAverage=((cAverage+cTemp[i])》》1);
}
return(cAverage);
}
void InitCom(unsigned char BaudRate){
switch (BaudRate){
case 1: THTL = 64; break; //波特率300
case 2: THTL = 160; break; //600
case 3: THTL = 208; break; //1200
case 4: THTL = 232; break; //2400
case 5: THTL = 244; break; //4800
case 6: THTL = 250; break; //9600
case 7: THTL = 253; break; //19200
case 8: THTL = 255; break; //57600
default: THTL = 208; break; //1200
}
}
void Chip_initial(void){
IE=0;
// 定时器控制字初始化
TMOD=0x21; // 定时器1为方式2,定时器0为方式1
TCON=0x50; // 设置外部中断类型
T2CON=0x0d; // 选择定时器1为波特率发生器,T2为捕获工作方式
// ET2=1;
ET0=1; // 允许定时器0、定时器2中断
// 外部中断设置
EX0=0; // FFSK中断初始时关闭,有载波时再开启
EX1=0;
IT1=1; // 外部中断0、1均为下降沿触发
IT0=1;
// 启动定时器0
TH0=vT0HVal; // 启动定时器0
TL0=vT0LVal;
TR0=1;
InitCom(6); //设置波特率为9600 1-7波特率300-19200
SCON = 0x50; //串口方式1,允许接收
TH1 = THTL;
TL1 = THTL;
PCON = 0x80; //波特率加倍控制,SMOD位
RI = 0; //清收发标志
TI = 0;
TR1 = 1; //启动定时器
IP=0x02; //PT2=1
IPH=0x02; //PT2H=1,PT0H=1
EA=1;
delay_ms(10); // 延时是为了避免定时器0无法产生中断的问题
}
void Para_initial(void){
OutFlag=0;
cT01ms = vT01ms;
cT10ms = vT10ms;
// cT100ms = vT100ms;
cT01s = vT01S;
CS = 0; //设置CS为0不选任何的音源,如为1则选第1路
}
void system_initial(void){
Chip_initial();
Para_initial();
DogReset(); // 已针对 STC89C58RD+ 作修改.06-04-06
}
void main(void){
system_initial();
while(1){
DogReset();
if(OutFlag){
OutFlag=0;
send_char_com(AD_Filter());
}
}
}
void Trint0(void) interrupt 1 using 1{
TR0=0; // 时基1mS
TH0=vT0HVal;
TL0=vT0LVal;
TR0=1;
TF0=0;
if(!(--cT01ms)){
cT01ms=vT01ms;
if(!(--cT10ms)){
cT10ms=vT10ms;
if(!(--cT01s)){
cT01s=vT01S;
OutFlag=1;
}
}
}
}
void ComInINT(void) interrupt 4 {
if (RI){ //判断是不收完字符
switch(SBUF){
case 0x61: CS = 1; break; //根据SBUF设置CS 接收‘abcde’调试方便
case 0x62: CS = 2; break;
case 0x63: CS = 3; break;
case 0x64: CS = 4; break;
case 0x65: CS = 0; break;
}
P1 = 255; //P1口全为高电平,4-7通过反相为低不选任何音源,0-3为高用于读取按键
RI = 0; //RI清零
}
}
小编推荐阅读:
-
基于单片机ADC0832两路模数转换仿真程序2023-05-22 935
-
基于AT89C51单片机ADC0832模数转换与显示2023-05-04 1478
-
基于51单片机的数字电压表(ADC0832)2022-12-30 1472
-
【单片机基础】ADC0832详解2021-11-30 6746
-
《单片机实践项目》之基于51单片机+ADC0832的数字电压表的设计(两种ADC0832电路仿真图绘制)2021-11-23 1371
-
基于单片机的数字电压表制作——ADC0832模数转换应用程序2021-09-22 1459
-
基于单片机的数字电压表制作——ADC0832模数转换应用程序(C语言)2021-09-15 1810
-
使用单片机实现ADC0832模数转换与LCD显示的C语言实例程序免费下载2021-03-30 1483
-
使用单片机实现T6963C液晶曲线显示ADC0832两路模数转换结果的C语言程序2021-03-21 1268
-
adc0832在ad中怎么画_51单片机adc0832汇编程序2020-04-26 7385
-
adc0832简单应用c程序2017-12-19 7335
-
基于ADC0832的单片机数据采集系统设计课程设计2017-07-27 1804
-
基于8051的Proteus仿真-ADC0832模数转换与显示2016-09-01 833
全部0条评论

快来发表一下你的评论吧 !
