

机器人局部避障的动态窗口法的运动轨迹分析和对比
FPGA/ASIC技术
描述
机器人局部路径规划方法有很多,ROS中主要采用的是动态窗口法(但是和原论文中的dwa方法不一样,具体见最后)。动态窗口法主要是在速度(v,w)空间中采样多组速度,并模拟机器人在这些速度下一定时间(sim_period)内的轨迹。在得到多组轨迹以后,对这些轨迹进行评价,选取最优轨迹所对应的速度来驱动机器人运动。该算法突出点在于动态窗口这个名词,它的含义是依据移动机器人的加速性能限定速度采样空间在一个可行的动态范围内。

为了更加直观的感受速度如何采样以及如何排除会碰到障碍的速度,将速度采样的伪代码列车如下:
Sample velocities code demo:
首先在V_m∩V_d的范围内采样速度:
allowable_v = generateWindow(robotV, robotModel)
allowable_w = generateWindow(robotW, robotModel)
然后根据能否及时刹车剔除不安全的速度:
for each v in allowable_v
for each w in allowable_w
dist = find_dist(v,w,laserscan,robotModel)
breakDist = calculateBreakingDistance(v)//刹车距离
if (dist > breakDist) //如果能够及时刹车,该对速度可接收
如果这组速度可接受,接下来利用评价函数对其评价,找到最优的速度组
同时注意:为了简化每组速度对应轨迹的计算,改算法假设机器人在往前模拟轨迹的这段时间(sim_period)内速度不变,直到下一时刻采样给定新的速度命令。
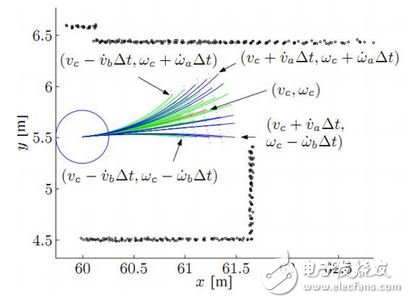
动态窗口采样的轨迹如下图所示:
总结起来三者构成的评价函数的物理意义是:在局部导航过程中,使得机器人避开障碍,朝着目标以较快速度行驶,缺一不可。
流程清楚以后,dwa算法的demo如下:
BEGIN DWA(robotPose,robotGoal,robotModel)
laserscan = readScanner()
allowable_v = generateWindow(robotV, robotModel)
allowable_w = generateWindow(robotW, robotModel)
for each v in allowable_v
for each w in allowable_w
dist = find_dist(v,w,laserscan,robotModel)
breakDist = calculateBreakingDistance(v)
if (dist > breakDist) //can stop in time
heading = hDiff(robotPose,goalPose, v,w)
//clearance与原论文稍不一样
clearance = (dist-breakDist)/(dmax - breakDist)
cost = costFunction(heading,clearance, abs(desired_v - v))
if (cost > optimal)
best_v = v
best_w = w
optimal = cost
set robot trajectory to best_v, best_w
END
引申到ROS:
在ROS的dwa应用中,好像只用了窗口采样速度,到故障物的最小距离以及刹车距离都没有计算,如果某条轨迹上有障碍,那直接丢弃这条轨迹。并且ROS中的评价函数也不是用的这个,采用的是Gerkey的论文《planning and control in unstructured Terrain》中的评价函数。
参考:
dwa:
1.Fox.《The Dynamic Window Approach To CollisionAvoidance》
2.MarijaSeder. 《dynamic window based approach tomobile robot motion control in the presence of moving obstacles》
3.
运动模型:
4.
5. https://www.cs.princeton.edu/courses/archive/fall11/cos495/COS495-Lectur...
6.
最后贴出matlab仿真代码:
% -------------------------------------------------------------------------
%
% File : DynamicWindowApproachSample.m
%
% Discription : Mobile Robot Motion Planning with Dynamic Window Approach
%
% Environment : Matlab
%
% Author : Atsushi Sakai
%
% Copyright (c): 2014 Atsushi Sakai
%
% License : Modified BSD Software License Agreement
% -------------------------------------------------------------------------
function [] = DynamicWindowApproachSample()
close all;
clear all;
disp('Dynamic Window Approach sample program start!!')
x=[0 0 pi/2 0 0]';% 机器人的初期状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)]
goal=[10,10];% 目标点位置 [x(m),y(m)]
% 障碍物位置列表 [x(m) y(m)]
% obstacle=[0 2;
% 4 2;
% 4 4;
% 5 4;
% 5 5;
% 5 6;
% 5 9
% 8 8
% 8 9
% 7 9];
obstacle=[0 2;
4 2;
4 4;
5 4;
5 5;
5 6;
5 9
8 8
8 9
7 9
6 5
6 3
6 8
6 7
7 4
9 8
9 11
9 6];
obstacleR=0.5;% 冲突判定用的障碍物半径
global dt; dt=0.1;% 时间[s]
% 机器人运动学模型
% 最高速度m/s],最高旋转速度[rad/s],加速度[m/ss],旋转加速度[rad/ss],
% 速度分辨率[m/s],转速分辨率[rad/s]]
Kinematic=[1.0,toRadian(20.0),0.2,toRadian(50.0),0.01,toRadian(1)];
% 评价函数参数 [heading,dist,velocity,predictDT]
evalParam=[0.05,0.2,0.1,3.0];
area=[-1 11 -1 11];% 模拟区域范围 [xmin xmax ymin ymax]
% 模拟实验的结果
result.x=[];
tic;
% movcount=0;
% Main loop
for i=1:5000
% DWA参数输入
[u,traj]=DynamicWindowApproach(x,Kinematic,goal,evalParam,obstacle,obstacleR);
x=f(x,u);% 机器人移动到下一个时刻
% 模拟结果的保存
result.x=[result.x; x'];
% 是否到达目的地
if norm(x(1:2)-goal')<0.5
disp('Arrive Goal!!');break;
end
%====Animation====
hold off;
ArrowLength=0.5;%
% 机器人
quiver(x(1),x(2),ArrowLength*cos(x(3)),ArrowLength*sin(x(3)),'ok');hold on;
plot(result.x(:,1),result.x(:,2),'-b');hold on;
plot(goal(1),goal(2),'*r');hold on;
plot(obstacle(:,1),obstacle(:,2),'*k');hold on;
% 探索轨迹
if ~isempty(traj)
for it=1:length(traj(:,1))/5
ind=1+(it-1)*5;
plot(traj(ind,:),traj(ind+1,:),'-g');hold on;
end
end
axis(area);
grid on;
drawnow;
%movcount=movcount+1;
%mov(movcount) = getframe(gcf);%
end
toc
%movie2avi(mov,'movie.avi');
function [u,trajDB]=DynamicWindowApproach(x,model,goal,evalParam,ob,R)
% Dynamic Window [vmin,vmax,wmin,wmax]
Vr=CalcDynamicWindow(x,model);
% 评价函数的计算
[evalDB,trajDB]=Evaluation(x,Vr,goal,ob,R,model,evalParam);
if isempty(evalDB)
disp('no path to goal!!');
u=[0;0];return;
end
% 各评价函数正则化
evalDB=NormalizeEval(evalDB);
% 最终评价函数的计算
feval=[];
for id=1:length(evalDB(:,1))
feval=[feval;evalParam(1:3)*evalDB(id,3:5)'];
end
evalDB=[evalDB feval];
[maxv,ind]=max(feval);% 最优评价函数
u=evalDB(ind,1:2)';%
function [evalDB,trajDB]=Evaluation(x,Vr,goal,ob,R,model,evalParam)
%
evalDB=[];
trajDB=[];
for vt=Vr(1):model(5):Vr(2)
for ot=Vr(3):model(6):Vr(4)
% 轨迹推测; 得到 xt: 机器人向前运动后的预测位姿; traj: 当前时刻 到 预测时刻之间的轨迹
[xt,traj]=GenerateTrajectory(x,vt,ot,evalParam(4),model); %evalParam(4),前向模拟时间;
% 各评价函数的计算
heading=CalcHeadingEval(xt,goal);
dist=CalcDistEval(xt,ob,R);
vel=abs(vt);
% 制动距离的计算
stopDist=CalcBreakingDist(vel,model);
if dist>stopDist %
evalDB=[evalDB;[vt ot heading dist vel]];
trajDB=[trajDB;traj];
end
end
end
function EvalDB=NormalizeEval(EvalDB)
% 评价函数正则化
if sum(EvalDB(:,3))~=0
EvalDB(:,3)=EvalDB(:,3)/sum(EvalDB(:,3));
end
if sum(EvalDB(:,4))~=0
EvalDB(:,4)=EvalDB(:,4)/sum(EvalDB(:,4));
end
if sum(EvalDB(:,5))~=0
EvalDB(:,5)=EvalDB(:,5)/sum(EvalDB(:,5));
end
function [x,traj]=GenerateTrajectory(x,vt,ot,evaldt,model)
% 轨迹生成函数
% evaldt:前向模拟时间; vt、ot当前速度和角速度;
global dt;
time=0;
u=[vt;ot];% 输入值
traj=x;% 机器人轨迹
while time<=evaldt
time=time+dt;% 时间更新
x=f(x,u);% 运动更新
traj=[traj x];
end
function stopDist=CalcBreakingDist(vel,model)
% 根据运动学模型计算制动距离,这个制动距离并没有考虑旋转速度,不精确吧!!!
global dt;
stopDist=0;
while vel>0
stopDist=stopDist+vel*dt;% 制动距离的计算
vel=vel-model(3)*dt;%
end
function dist=CalcDistEval(x,ob,R)
% 障碍物距离评价函数
dist=100;
for io=1:length(ob(:,1))
disttmp=norm(ob(io,:)-x(1:2)')-R;%僷僗偺埵抲偲忈奞暔偲偺僲儖儉岆嵎傪寁嶼
if dist>disttmp% 离障碍物最小的距离
dist=disttmp;
end
end
% 障碍物距离评价限定一个最大值,如果不设定,一旦一条轨迹没有障碍物,将太占比重
if dist>=2*R
dist=2*R;
end
function heading=CalcHeadingEval(x,goal)
% heading的评价函数计算
theta=toDegree(x(3));% 机器人朝向
goalTheta=toDegree(atan2(goal(2)-x(2),goal(1)-x(1)));% 目标点的方位
if goalTheta>theta
targetTheta=goalTheta-theta;% [deg]
else
targetTheta=theta-goalTheta;% [deg]
end
heading=180-targetTheta;
function Vr=CalcDynamicWindow(x,model)
%
global dt;
% 车子速度的最大最小范围
Vs=[0 model(1) -model(2) model(2)];
% 根据当前速度以及加速度限制计算的动态窗口
Vd=[x(4)-model(3)*dt x(4)+model(3)*dt x(5)-model(4)*dt x(5)+model(4)*dt];
% 最终的Dynamic Window
Vtmp=[Vs;Vd];
Vr=[max(Vtmp(:,1)) min(Vtmp(:,2)) max(Vtmp(:,3)) min(Vtmp(:,4))];
function x = f(x, u)
% Motion Model
% u = [vt; wt];当前时刻的速度、角速度
global dt;
F = [1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 0 0
0 0 0 0 0];
B = [dt*cos(x(3)) 0
dt*sin(x(3)) 0
0 dt
1 0
0 1];
x= F*x+B*u;
function radian = toRadian(degree)
% degree to radian
radian = degree/180*pi;
function degree = toDegree(radian)
% radian to degree
degree = radian/pi*180;
- 相关推荐
- 热点推荐
- 机器人
-
Arduino机器人避障2022-08-18 791
-
【KittenBot机器人试用申请】KittenBot绘图避障机器人学习课程2017-07-07 2919
-
解读机器人的几大避障技术2018-12-12 14772
-
避障机器人电路设计解决方案2020-10-28 4157
-
浅谈差速机器人的纯轨迹跟踪仿真2021-09-01 1572
-
移动机器人动态避障算法2010-03-01 621
-
基于人工神经网络实现智能机器人的避障轨迹控制2015-11-30 782
-
自主机器人避障方法研究2016-09-06 827
-
基于模糊改进人工势场法的机器人避障方法研究_游文洋2017-03-22 867
-
arduino nano避障机器人2022-07-19 974
-
基于Arduino的避障机器人汽车2022-10-31 808
-
如何制作避障机器人2022-12-01 1315
-
基于Arduino UNO的避障机器人2022-12-22 752
-
蓝牙控制的避障机器人2023-06-28 671
-
机器人红外避障2024-09-19 706
全部0条评论

快来发表一下你的评论吧 !
