

基于FPGA的高精度三维成像声呐系统
FPGA/ASIC技术
描述
摘要:高精度三维成像声呐的实现需要完成大规模信号同步采集和海量数据并行计算,为此,提出基于现场可编程逻辑门阵列的并行计算系统。在使用同源时钟的前提下,利用Spartan-3 对平面阵2304 路换能器信号进行同步采样,通过离散傅里叶变换降采样以减小采样数据规模,采用Virtex-5 重新计算换能器权重以降低运算量,使用分步的波束形成算法以减小系统所消耗的存储器规模,同时在PC上实现三维图像实时显示。实验结果证明了该系统的可行性。
1 概述
高精度三维成像技术是目前水声设备研究的重要创新领域,在海底勘探、沉船打捞、海洋研究等领域都有重要应用。目前研制高精度三维声呐成像系统需要克服的关键技术难点在于大规模换能器数据的同步采集和海量数据的并行计算所带来的巨大的硬件开销[1]。为此,文献[2]提出使用稀疏矩阵换能器阵列,对平面阵内不同索引号的换能器进行权重分配,对权重为0 的换能器做忽略处理从而减少前端信号采集通道和后端的数据运算量。从减少波束形成过程中参与并行运算矩阵的大小出发,文献[3]提出将大阵列进行多子阵划分,通过换能器发射机和接收机做一定的匹配设计,使用波束多级合成的办法形成最终的波束,也能做到减少运算量。
本文基于波束形成算法原理,针对大规模二维换能器信号进行同步采样和大规模的数据处理,设计并实现48×48 路信号的同步采样,使用高性能现场可编辑逻辑门阵列为系统平台,采用优化后的模拟退火算法[4],实现128×128 个空间波束形成,用于海底状况成像。
2 系统原理和结构
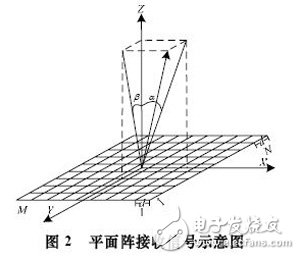
三维声学成像声呐使用的波束形成器可以看成一个空间滤波器,它可以滤去空间某些方向的信号,只让指定方向的信号通过。本系统利用M×N(M=N=48)平面阵接收水下物体反射回的声学信号并做波束形成运算形成P×Q 个波束,求出开角范围内的波束形成能量值,再根据不同的能量值进行立体绘图,从而得到一幅三维图像。
系统需要完成换能器信号的调理、信号采集、波束形成运算,最终计算结果上传。系统采用分布式结构,分为前端信号调理采集子系统和后端数据处理子系统,具体结构如图1 所示。
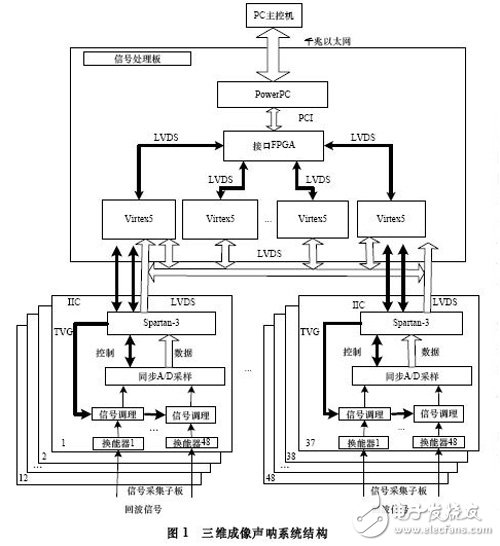
前端信号调理采集子系统由48 块子信号电路板组成,实现前端模拟信号调理采样,并进行初步的信号处理。每块子板上有1 片Xilinx Spartan-3,由它控制多路AD 以实现多路信号的同步采集,并对采样数据进行多点的离散傅里叶变换。变换所得数据经LVDS 高速信号接口传递到后端的信号电路板上。
后端数据处理子系统即图1 中的块信号处理电路板,是由4 片用于信号处理高端领域的Xilinx Virtex-5、1 片Spartan-3(接口FPGA)和1 片PowerPC 嵌入式处理器构成。Virtex-5 之间使用高速LVDS 信号进行数据交互,各自从其他3 片Virtex-5 得到所要数据以实现波束形成算法,并最终将计算完成的结果传输给接口FPGA。每片Virtex-5 需要管理12 块信号采集子板,在系统配置阶段需要通过IIC 来对信号采集子板进行配置,在数据处理时需要处理来自12 块信号采集子板的数据。为实现与PowerPC 处理器数据通信,接口FPGA 需将上传的数据做格式转换。PowerPC 处理器外围扩展有Nor Flash 用于存储系统代码,Nand Flash 用于存储有效传感器的编号和相应的权重系数等系统相关数据。
PC 主控机通过千兆以太网接口与信号处理电路板进行数据交互,并调用OpenGL 相关函数,实现三维图像的实时显示[5]。
3 大规模平面阵换能器信号采集
为实现对大规模平面阵进行信号的同步采样,信号采集子板需要完成以下任务:换能器输出模拟信号的信号调理,整阵列信号的同步采集,AD 信号的离散傅里叶变换。
使用Xilinx Spartan-3 作为信号采集子板的主控芯片,负责1 条线阵48 路换能器的信号采集,整个成像声呐系统使用300 kHz 的声学信号,系统采用900 kHz 的采样率。
如图2 所示,换能器将声学信号转换成微弱的电信号,该信号通过一个高通滤波器滤除中低频的环境噪声。声呐工作在主动方式时,TVG 控制是前置接收机的一个较为重要的模块,它可防止接收机在发射脉冲期间出现的阻塞现象,同时又有利于混响背景的归一化。
根据声信号在水中的传输特性,Spartan-3 通过SPI 接口向DA 发出数据,经转换后的模拟信号输出给TVG,以控制采样信号压缩比。为防止信号出现混叠现象和较好的滤去高次谐波成分,本文设计了一款二阶带通滤波器,以实现当输入信号频率大于570 kHz 时使信号衰减20 dB 以上,同时保证有效的信号范围270 kHz~330 kHz(考虑水声信号的多普勒频移)衰减小于3 dB。上述滤波器设计在一定的阻容精度要求范围内(电阻精度1%,电容精度5%),可以较好地实现各采样通路之间的相位一致性。
由于AD 的采样频率是根据转换时钟得到的,为了使各路信号采样的相位满足系统设计要求,整个系统需要采用外部的同源时钟,即图2 中的同步采样时钟。每块信号采集子板的同步采样时钟与Spartan-3 内部处理数据的系统时钟是相互独立的。同步采样时钟在实现上是采用多级时钟分配器,先将时钟由1 路分为4 路,然后将这4 路分别分为12 路,最后形成48 路同源的时钟信号,通过连接接口传输给信号采集子板。
完成信号采样存储后,信号采集子板上的Spartan-3 需要对采样数据进行离散傅里叶变换,并将所需上传的数据通过LVDS 接口上传给信号处理板。
4 信号处理
传统的空间波束形成器使用对空间范围内的采样信号进行波束形成,使用相移参数来调整采样数据,计算过程如下:
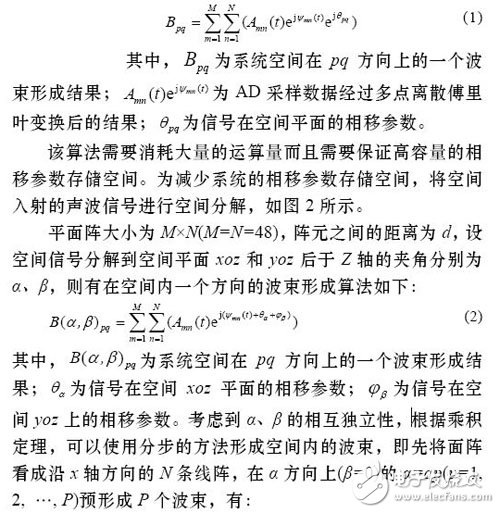
为减少算法的运算量,系统使用改进型的退火算法。根据Trucco A 的观点,对二维平面上的每一个换能器分配权重系数,在最大旁瓣可以接受的条件下,部分换能器的权重系数可以分配为0,即达到对换能器稀疏化,减小系统的运算量。
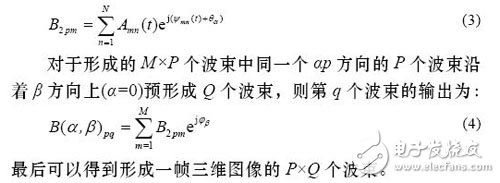
基于上述原理,信号处理板上每片Virtex-5 接收12 块子信号采集板的数据,预形成12 条线阵的波束,然后保留其中的1/4 结果,将其他3/4 的预形成波束结果通过自定义LVDS信号传递给其他3 片Virtex-5。同时每片Virtex-5 从其他3 片Virtex-5 得到计算另一个方向上12 条线阵上空间波束所需的中间波束形成数据,则每片Virtex-5 完成128×32 个波束,并将计算结果传递给接口FPGA。接口FPGA 将从每片Virtex-5得到的数据进行整合,通过PCI 接口传递给PowerPC,最后PowerPC 通过千兆以太网传递给PC 进行三维成像。
5 实验结果
为测试系统在实际工作环境中的成像效果,设计水下实验。发射机向水下发射声波,接收机同时侦听水下反射波,不同强度的物体,反射回的声波强度完全不一样。开启系统中四分之一的换能器,对水下悬挂的一大一小2 只圆盘进行探测,结果如图3 所示。
图3 中有2 层图像,右边(前面)一层深色区域为一大一小2 只圆盘的图像效果,左边(后面)一层为水下墙壁。由测试结果可知,本系统的设计结果符合理论验证结果,并完成了系统设计指标。
6 结束语
本文提出的基于FPGA 的相控阵三维声学摄像声呐信号采集和处理系统能较好地解决大量换能器信号的同步采集和海量数据的并行计算的问题。实验结果显示,三维图像能实时在PC 上显示,验证了此方案的可行性,但系统并未到实际深水环境下测试,实际实验有待进行。下一步的研究方向是减少相控阵成像声纳系统内存需求量和乘累加计算量。
-
高精度三维运动平台可以应用到哪些场合?2015-12-28 7369
-
三维快速建模技术与三维扫描建模的应用2018-08-07 4032
-
广西扫描服务三维检测三维扫描仪2018-08-29 6095
-
高精度3D扫描如何实现?2019-08-06 7395
-
如何设计三维图形加速系统?2019-10-18 2464
-
基于STM32的三维旋转显示平台设计(立体成像)!!!2020-08-27 4086
-
激光三维成像技术及其主要应用2012-07-16 1869
-
基于多波束合成孔径声呐的三维场景构建仿真研究_徐剑2017-03-17 1301
-
基于声纳探测技术的水下三维场景实时成像系统2017-11-18 16973
-
XTOM三维光学扫描测量系统画册2020-11-19 1155
-
重卡汽车高精度三维扫描3D数据安装模拟设计服务2023-06-02 1271
-
基恩士 高精度三维扫描测量仪 VL系列2022-10-26 4430
-
基于光学成像的物体三维重建技术研究2023-09-15 2023
-
偏振三维成像技术的原理和研究进展2023-10-26 3251
-
泰来三维|文物三维扫描,文物三维模型怎样制作2024-03-12 1922
全部0条评论

快来发表一下你的评论吧 !
