

四轴飞行器怎么起飞_四轴飞行器原理
嵌入式设计应用
描述
四轴飞行器又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。这四轴飞行器(Quadrotor)是一种多旋翼飞行器。四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。具体的技术细节在“基本运动原理”中讲述。因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。
小型的四轴飞行器可以自由地实现悬停和空间中的自由移动,具有很大的灵活性。此外,因为它结构简单,机械稳定性好,所以成本低廉、性价比很高。主要的应用是玩具、航模,以及航拍,新的应用也在不断的拓展之中。
四轴飞行器组成
四轴飞行器由电机、电调、桨、机架、电池、充电器、遥控器、飞控板等部件组成。
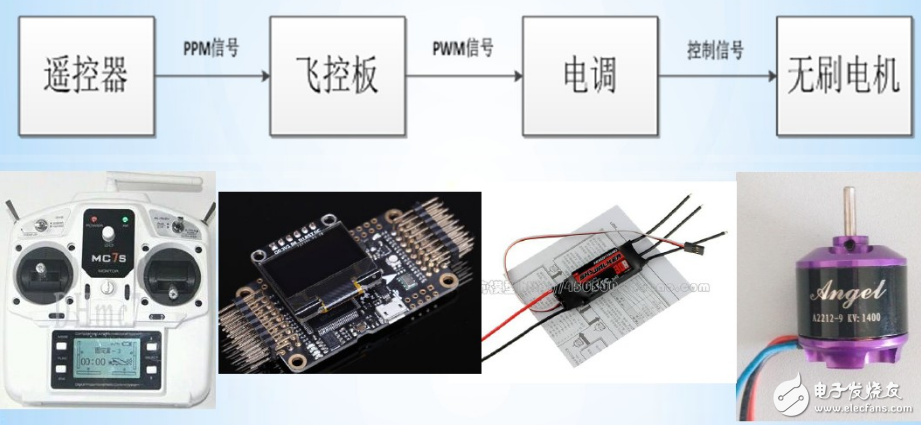
飞控板
飞行控制器(飞控)是飞行器的大脑,飞控板上配置有中央处理器、姿态测量传感器、无线接收器等器件,飞控板完成自身稳定的飞行,并且它还要从接收器接受信号,并把信号传输给电调告诉它如何飞行,其中最困难的在于如何保持飞行器飞行的稳定性。为了保持稳定性,飞控板就需要各种各样的传感器完成自身的姿态解算并控制四个电机的输出动力,使自身保持稳定。
电调
电调的作用就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。因为电机的电流是很大的,通常每个电机正常工作时,平均有3A左右的电流,如果没有电调的存在,飞控板根本无法承受这样大的电流(另外也没驱动无刷电机的功能)。同时电调的BEC输出功能在四轴当中还充当了电压变化器的作用,将11.1v的电压变为5v为飞控板和遥控接收机供电。在四轴上,4个电调的正负极需要并联(红色连一起,黑色连一起),并接到电池的正负极上;电调3根黑色的电机控制线用于连接电机。
正反桨
四轴飞行为了抵消螺旋桨的自旋,相隔的桨旋转方向是不一样的,所以需要正反桨。正反桨的风都向下吹。适合顺时针旋转的叫正浆、适合逆时针旋转的是反浆。安装的时候,一定记得无论正反桨,有字的一面是向上的(桨叶圆润的一面要和电机旋转方向一致)。
四轴飞行器自动控制原理
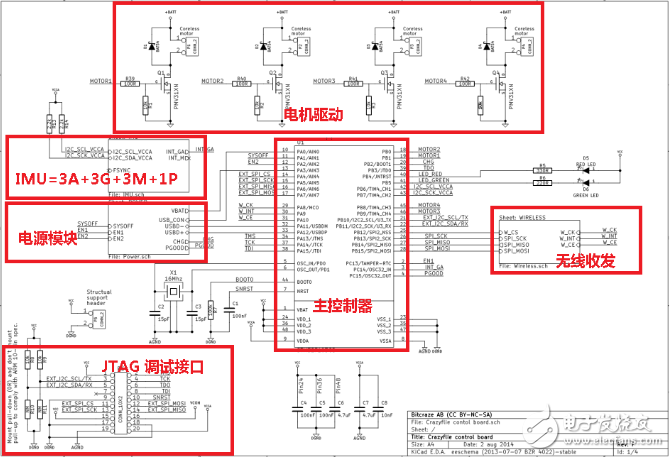
电路图
典型的传统直升机配备有一个主转子和一个尾浆。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
为了保持飞行器的稳定飞行,在四轴飞行器上装有3个方向的陀螺仪和3轴加速度传感器组成惯性导航模块,可以计算出飞行器此时相对地面的姿态以及加速度、角速度。飞行控制器通过算法计算保持运动状态时所需的旋转力和升力,通过电子调控器来保证电机输出合适的力。
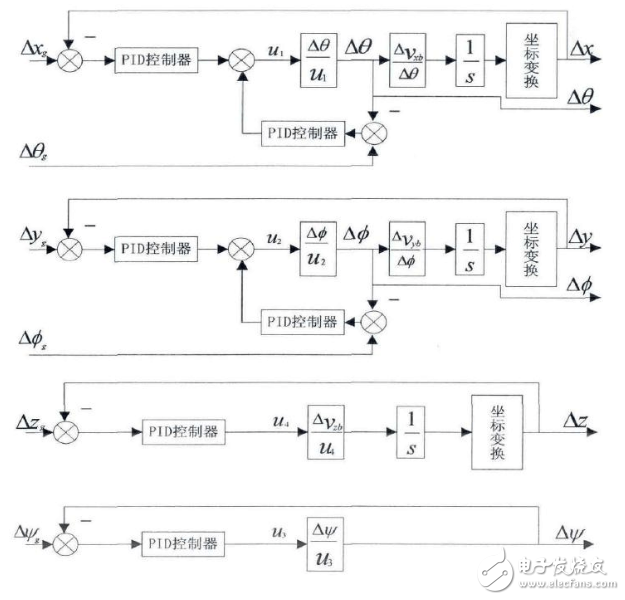
控制系统结构框图
四轴飞行器运动原理
如图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
四轴飞行器是一个在空间具有6个活动自由度(分别沿3个坐标轴作平移和旋转动作),但是只有4个控制自由度(四个电机的转速)的系统,因此被称为欠驱动系统(只有当控制自由度等于活动自由度的时候才是完整驱动系统)。不过对于姿态控制本身(分别沿3个坐标轴作旋转动作),它确实是完整驱动的。
与直升机相比,四轴飞行器可以实现的飞行姿态较少,不过基本的前进、后退、平移等状态都可以实现。但是四轴飞行器的机械结构远远比直升机简单,维修和更换的开销也非常小,这让四轴飞行器有了比直升机更大的应用优势。
垂直运动
图(a)中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
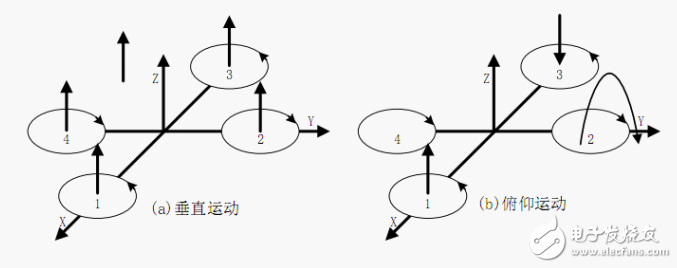
俯仰运动
图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速改变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
滚转运动
与图(b)的原理相同,在图(c)中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
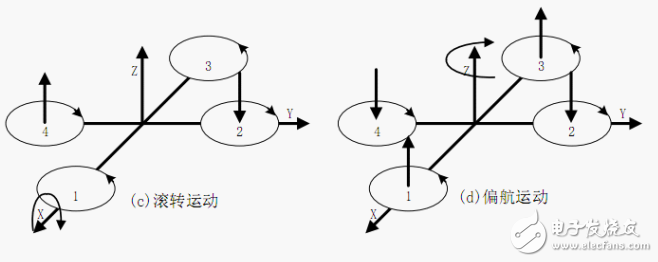
偏航运动
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图(d)中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。因为电机的总升力不变,飞机不会发会垂直运动。
前后运动
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图(e)中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图(b)的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。当然在图(b)图(c)中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
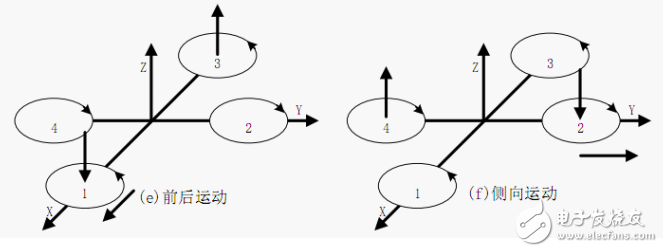
侧向运动
在图(f)中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
四轴飞行控制算法
四轴作为一个飞行控制系统,其本身是一个闭环控制系统,具有反馈调节功能,其主要控制过程分为姿态解算和控制过程两个步骤。
(1)姿态解算:姿态解算是借助陀螺仪和加速度计传感器测量出系统坐标系的3个方向的角速度以及加速度,然后进行卡尔曼滤波做数据滤波+融合处理,最后用四元素算法或者是欧拉角公式求解出惯性坐标系下的俯仰角(pitch)、翻滚角(roll)、偏航角(yaw),这3个角度成为姿态角。
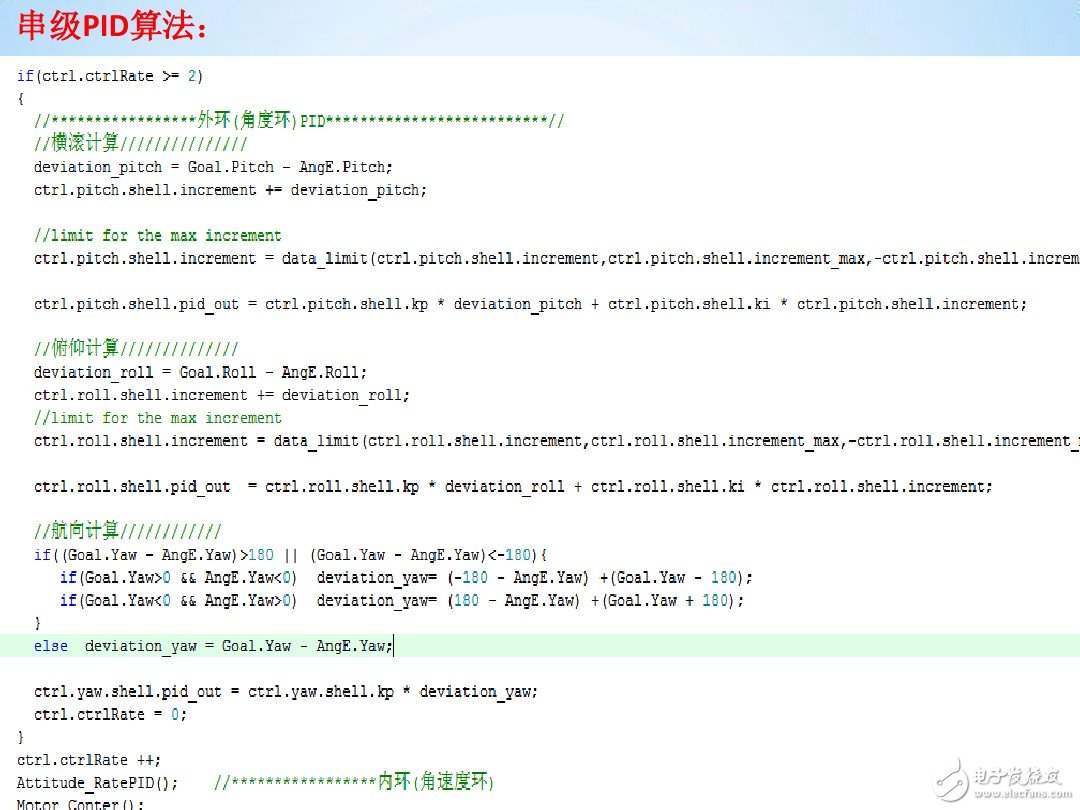
(2)控制过程:控制过程就是飞控板不停进行姿态解算并算出来当前时刻的姿态角,然后通过控制算法计算出来当前时刻要对四个电机转速的控制值,最终使四轴是3个姿态角始终保持在设定的状态下。如果想要四轴处于悬停状态,只要把3个目标姿态角都设为0°就行了;如果想要四轴处于其他飞行状态,只要调整3个目标姿态角就可以了,四轴就会自动的变化到预设的飞行状态上去。控制算法还是用的PID比较多,不过不是传统的PID,而是对PID做了改进和优化处理了。
- 相关推荐
- 热点推荐
- 四轴飞行器
-
四轴飞行器毕业设计_四轴飞行器源代码_四轴飞行器制作教程2015-05-08 14742
-
关于四轴飞行器的发展2012-07-27 12263
-
四轴飞行器2014-05-21 3803
-
四轴飞行器的小程序2015-08-08 5029
-
四轴飞行器的结构原理2016-01-15 6509
-
求微型四轴飞行器的教程2016-04-19 4283
-
四轴飞行器起飞2016-04-30 6188
-
四轴飞行器开发解密2018-01-02 4986
-
四轴飞行器教程资料分享2019-01-15 3730
-
四轴飞行器组装2015-11-02 1011
-
四轴飞行器飞行原理2015-11-11 1057
-
四轴飞行器答辩2016-06-08 1137
-
四轴飞行器教程2016-06-21 1798
-
四轴飞行器什么牌子好_十大四轴飞行器品牌排行版2018-03-27 17420
-
四轴飞行器如何对频_四轴飞行器怎么操作2018-03-28 101597
全部0条评论

快来发表一下你的评论吧 !
