

步进电机的矩角特性是什么
伺服与控制
描述
矩角特性
是指在单脉冲、电流不变的情况下,步进电动机的静转矩T与转子失调角θ之间的关系曲线T=f。
矩角特性是步进电动机的基本特性,正确而方便地测定这一特性是很重要的,但至今仍感到困难,人们早就想通过旋转感应电压,来测出步进电动机的矩角特性。可是由于步进电动机中旋转电压与静转矩之间的关系较复杂。
矩角特性测试
给定一个电脉冲信号,步进电机转子就转过相应的角度,这个角度就称作该步进电机的步距角。目前常用步进电机的步距角大多为1.8度(俗称一步)或0.9度(俗称半步)。以步距角为0.9度的进步电机来说,当我们给步进电机一个电脉冲信号,步进电机就转过0.9度;给两个脉冲信号,步进电机就转过1.8度。以此类推,连续给定脉冲信号,步进电机就可以连续运转。由于电脉冲信号与步进电机转角存在的这种线性关系,使得步进电机在速度控制、位置控制等方面得到了广泛的应用。
步进电机发热的合理范围:
电机发热允许到什么程度,主要取决于电机内部绝缘等级。内部绝缘性能在高温下(130度以上)才会被破坏。所以只要内部不超过130度,电机不会损环,而这时表面温度会在90度以下。所以,步进电机表面温度在70-80度都是正常的。简单的温度测量方法有用点温计的,也可以粗略判断:用手可以触摸1-2秒以上,不超过60度;用手只能碰一下,大约在70-80度;滴几滴水迅速气化,则90度以上了。
步进电机驱动器细分后的主要优点为:
完全消除了电机的低频振荡。低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果您的步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。?提高了电机的输出转矩。尤其是对三相反应式电机,其力矩比不细分时提高约30-40% 。?提高了电机的分辨率。由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率‘是不言而喻的。
1)步距角α
每给一个脉冲信号,电机转子转过角度的理论值。
其中,m为定子相数;z为转子齿数;k为通电系数,m相m拍,k=1;m相2m拍,k=2。
α一般很小,如:3°/1.5°,1.5°/0.75°,0.72°/0.36°等
2)矩角特性、最大静态转矩Mjmax和启动转矩Mq
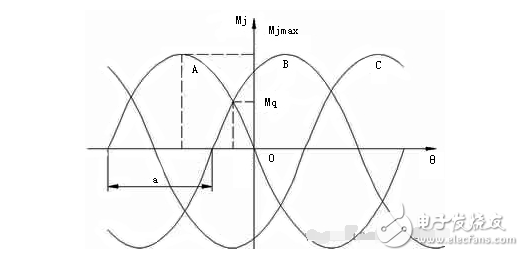
静态:步进电机处于通电状态,转子处在不动状态。
静态转矩Mj:在电机轴上施加一个负载转矩M,转子会在载荷方向上转过一个角度θ(失调角),转子因而受到一个电磁转矩Mj的作用与负载平衡。
矩角特性:步进电机单相通电的静态转矩Mj随失调角θ的变化曲线。
3)启动频率fq和启动时的惯频特性
启动频率或突跳频率fq:空载时,步进电机由静止突然启动并进入不丢步的正常运行状态所允许的最高频率。高于启动频率,将不能正常起动。
启动时的惯频特性:是指电机带动纯惯性负载时启动频率和负载转动惯量之间的关系。
步进电机在带负载(尤其是惯性负载)下的启动频率比空载要低。
4)运行矩频特性
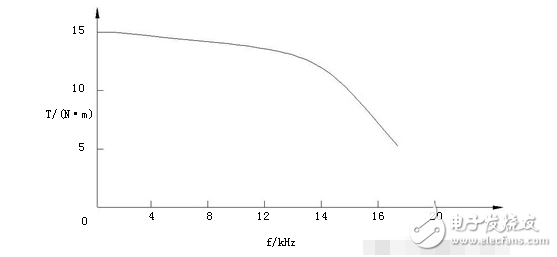
连续运行频率:步进电机启动后,其运行速度能跟踪指令脉冲频率连续上升而不丢步的最高工作频率。其值远大于启动频率。
运行矩频特性:是描述步进电机在连续运行时,输出转矩与连续运行频率之间的关系。
-
步进电机的原理与特性之基本特性2023-03-23 817
-
步进电机原理介绍2023-03-21 889
-
步进电机的种类 步进电机的步距角是什么2023-03-03 9601
-
步进电机的原理与特性之基本特性 相关资料分享2021-07-08 987
-
步进电机的特性测量方法有哪些2021-07-07 1459
-
步进电机基础-步进电机的原理与特性之基础理论2021-06-30 2055
-
步进电机的主要特性与基本特性2019-12-11 13841
-
设计和实现机电式单相步进电机的原理详细分析2019-11-04 1456
-
详解ARM单片机的双相步进电机细分驱动器设计2019-06-24 2540
-
ARM单片机的双相步进电机细分驱动器设计2018-02-24 3256
-
步进电机矩频特性曲线分析2017-11-21 45061
-
步进电机矩频特性测试系统设计2017-08-31 1005
-
一张图看懂步进电机的转矩频率特性2016-01-18 22653
-
步进电机的步距角和步进角2013-04-30 15474
全部0条评论

快来发表一下你的评论吧 !
