

Xilinx DA 摄像智能在驾驶员辅助平台的应用
安全驾驶仪
描述
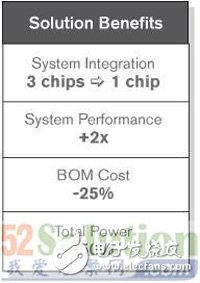
Zynq-7000 All Programmable SoC 在单片器件中高度集成高级驾驶辅助系统所需的感测域、环境特性描述以及决策制定功能,与传统多芯片解决方案相比,不但可显著降低系统材料成本、电路板复杂性与系统功耗,而且还可提高整体系统性能。
相比于传统方案来说新的xilinx Zynq-7000 All Programmable SoC 有如下优点:
•单芯片上嵌入式处理与可编程逻辑的技术突破可实现灵活的系统分区
•允许根据成本“合理精简”硬件平台,摄像,xilinx,da
•高度灵活地支持从视频分析算法到生产的持续改善更新•可消除影响多芯片 ADAS 解决方案的芯片到芯片数据带宽问题
•包含 IP 核、软件与参考设计的 ADAS 专用开发套件可帮助缩短开发时间
图:现有方案与新方案对比
Xilinx Smarter Solution 不仅包括 All Programmable FPGA 和 SoC,而且还含有一系列可定制的 SmartCORE 和 LogiCORE IP 核,能够充分满足您独特的市场需求。Xilinx Vivado®Design Suite配合高度集成的开发工具流程,并采用 OpenCV 库、Vivado 高层次综合和IP Integrator,与 AISC 和 ASSP 解决方案相比,可更加快速灵活地向市场推出最具差异化的产品,同时降低风险和拥有成本。
低速特性配置
高速特性配置
以上系统级方框图表明了如何集成和扩展 Xilinx SmartCORE™、LogiCORE™ 与联盟计划成员 IP,充分满足多摄像头多功能驾驶辅助系统需求。局部动态配置优势不但可在可编程逻辑中置换 IP,最大限度提高功能数,同时还可确保尽可能最小的器件。低速特性配置可充分利用 IP 及软件实现后视摄像头环视摄像头以及行人检测功能,而高速特性配置则可设置后视车道偏离报警和盲点检测处理功能。
主要特性:
•多个摄像头上的 30FPS 性能
•逐像素摄像头数据预处理
•图像捕捉和转换
•图像复原 (De-Warp) 与缝合
•运动估计
•目标检测与分类
•汽车网络通信
•CAN
•以太网 AVB
Xilinx DA 摄像智能解决方案包括:
•小型多层视频控制器 SmartCORE IP
•镜头校正/视野变换 SmartCORE IP
•环视视频缝合 SmartCORE IP
•行人检测 HoG/SVM 加速器 SmartCORE IP
•LDW SmartCORE IP 的车道标记检测器加速器
•彩色摄像头 Bayer 解码器 SmartCORE IP
•可编程运动估计 SmartCORE IP
•多功能视频输入/捕捉 SmartCORE IP
•比特块传输 2D 图形加速器 SmartCORE IP
•位图 2.5D 图形加速器 SmartCORE IP
•Ethernet AVB (Audio Video Bridging) LogiCORE IP
•CAN LogiCORE IP
•驾驶辅助参考设计
•校正软件
•支持普及型汽车操作系统
•ETAS AUTOSAR RTA-OSEK
•Vx Works
•GHS Integrity
•QNX
•OpenGL ES 和公开 CV 库
•矢量 CANbedded osCAN 与低级驱动器支持 CAN 堆栈
•驾驶辅助应用软件
•logiADAK Zynq-7000 AP SoC 汽车驾驶辅助套件
•Zynq-7000 AP SoC ZC702 评估套件
-
赛灵思:汽车驾驶员辅助系统之利用FPGA的处理能力2013-03-07 5691
-
全新汽车摄像头向驾驶员提供无扭曲倒车辅助影像2013-03-22 1707
-
驾驶员辅助系统:新型雷达设计2014-02-14 1288
-
ADAS的发展给驾驶员驾驶视野的改变2018-08-29 3375
-
汽车先进驾驶员辅助系统ADAS:车道偏离告警系统资料分享2018-11-06 3739
-
摄像监控系统扩展驾驶员视角2019-03-05 2102
-
如何利用摄像监控系统扩大驾驶员的视野?2019-08-05 1933
-
什么是驾驶员监控系统?2019-09-16 9080
-
2021年汽车驾驶员(初级)考试平台及汽车驾驶员(初级)考试申请表 精选资料分享2021-08-31 1170
-
摄像监控系统如何扩大驾驶员的视野2022-11-10 875
-
高级驾驶员辅助系统(ADAS)解决方案2022-11-14 1477
-
高级驾驶员辅助系统(ADAS)2011-09-13 2102
-
基于FGPA的汽车驾驶员辅助系统2012-06-25 977
-
Xilinx新系列汽车设备如何推进下一代驾驶员辅助2018-11-27 3378
-
汽车驾驶员辅助系统如何利用FPGA的处理能力2019-02-19 1195
全部0条评论

快来发表一下你的评论吧 !
