

矢量控制坐标变换_矢量控制的基本方法_永磁电机矢量控制系统结构
电子常识
描述
由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。上世纪60年代末由达姆斯塔特工业大学(TU Darmstadt)的K.Hasse提出。在70年代初由西门子工程师F.Blaschke在不伦瑞克工业大学(TU Braunschweig)发表的博士论文中提出三相电机磁场定向控制方法,通过异步电机矢量控制理论来解决交流电机转矩控制问题。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
永磁电动机工作的时候,定子绕组的电压、电流、磁链等物理量都是随时间变化的,分析这些个电气量时,我们常用时间相量来表示。而每个绕组的空间位置也使得他们的变化比仅仅与时间有关,也与空间位置有关。
当我们考虑到它们所在绕组的空间位置,就可以如下图所示的空间向量来表示这些量。而我们说的矢量指得是定子电压、电流、磁链等空间矢量。该类矢量通过三相定子变量合成得到。
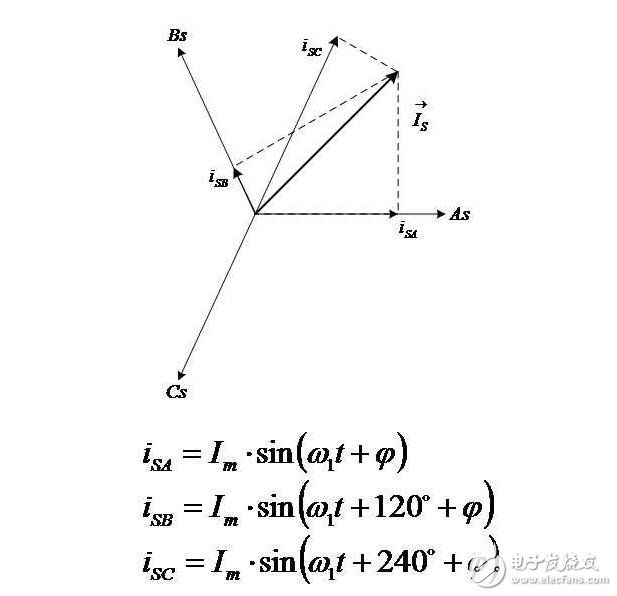
合成定子电流矢量就是:

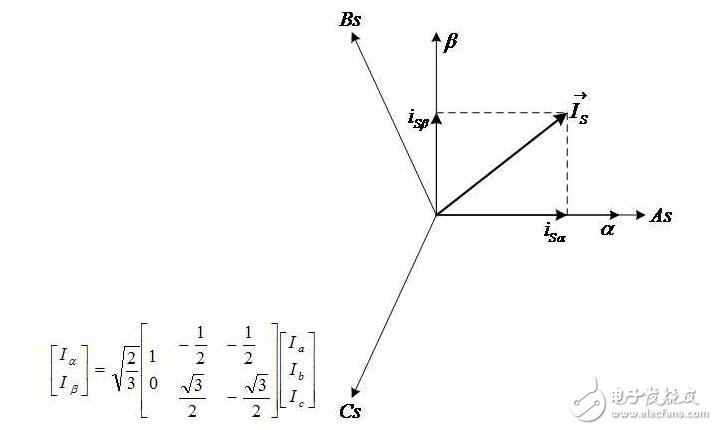
二、矢量控制坐标变换
3相/2相变换(Clarke变换):根据变换前后功率不变的约束条件,以定子电流为例:
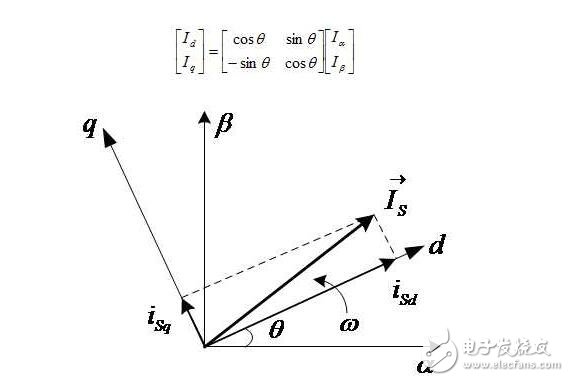
旋转变换(Park变换):根据变换前后功率不变的约束条件,同样以定子电流为例:
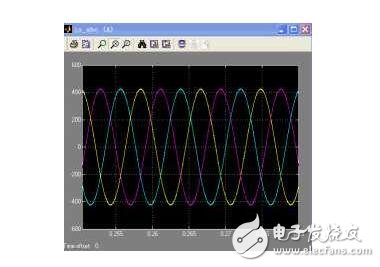
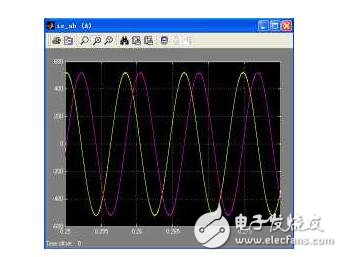
在SIMULINK中搭建模型,三相定子电流是下面这样的:
Clarke变换之后的电流是这样的:
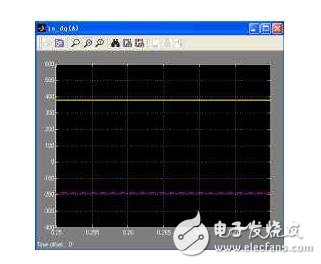
Park变换之后的定子电流是这样的:
三、矢量控制的基本思想
矢量控制是一种高性能交流电机控制方式,它基于交流电机的动态数学模型,通过对电机定子变量(电压、电流、磁链)进行三相/2相坐标变换,将三相正交的交流量变换为两相正交的交流量,再通过旋转变换,将两相正交的交流量变换为两相正交的直流量,采用类似于他激直流电机的控制方法,分别控制电机的转矩电流和励磁电流来控制电机转矩和磁链,具有直流电动机类似的控制性能。
四、矢量控制的基本方法
Id=0控制;
最大转矩/电流比控制;
恒功率弱磁控制;
最大功率控制;
1、Id=0控制:
id=0时,从电动机端口看,相当于一台它励直流电动机,定子电流中只有交轴分量,且定子磁动势空间矢量与永磁体磁场空间矢量正交等于90°,电动机转矩中只有永磁转矩分量,其值为
此时,反电动势相量与定子电流相量同相。对表面凸出的转子磁路结构的永磁同步电动机来说,此时单位定子电流可获得最大的转矩。或者说在生产所需要转矩的情况下,只需最小的定子电流,从而使铜耗下降,效率有所提高。这也是表面凸出示转子磁路结构的永磁同步电动机通常采用这种方式控制的原因。
2、最大转矩/电流比控制
最优转矩控制,也称定子电流最小的控制,或称为最大转矩电流控制,是指在转矩给定的情况下,最优配置d, q轴的电流分量,使定子的电流最小,即单位电流下电机输出转矩最大的矢量控制方法。
该方法可以减小电机的铜耗,提高运行效率,从而使整个系统的性能得到优化。此外,由于逆变器所需要输出的电流比较小,对逆变器容量的要求可相对的降低。
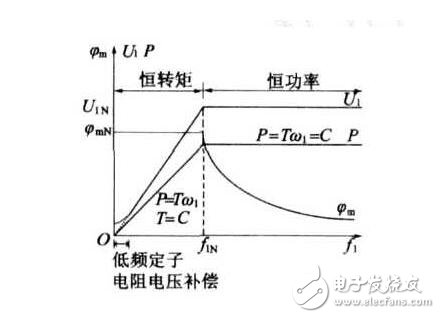
3、恒功率弱磁控制
对于传统的电励磁电机而言,弱磁控制是较容易实现的。但是对于永磁电机(如永磁同步电动机、永磁无刷直流电动机)而言,永磁体一旦装在电机内就不能够拆卸下来,而且它所产生的磁场大小是恒定的。这时要想弱磁只有利用电机的电枢反应。
永磁同步电动机的转子励磁固定不变,永磁场产生的反电势和速度成正比,当电机端电压随转速升高到逆变器能够输出的最大电压(在这之前是恒转矩运行区域)之后,继续升高电机的速度时永磁同步电动机将无法再作恒转矩运行,而必须维持电枢绕组的电势平衡,从而获得一个新的电机调速运行范围(恒功率弱磁运行区域)
4、最大功率因数控制
其特点是电机的功率因数恒定为1,逆变器的容量得到了充分的利用,但该方法所能输出的最大转矩比较小。
五、矢量控制的配件
1、PI控制器
2、SVPWM变换器
3、传感器
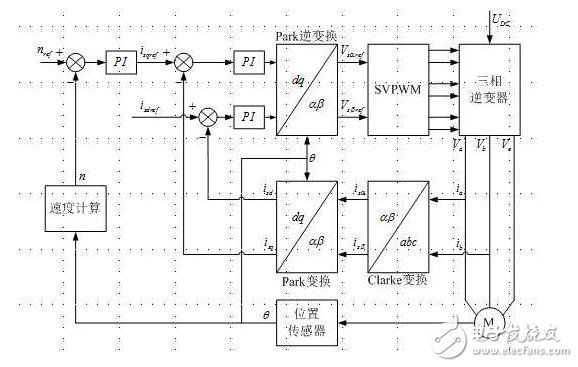
一个经典永磁电机矢量控制系统结构:
- 相关推荐
- 热点推荐
- 矢量控制
-
矩阵变换器——永磁同步发电机矢量控制系统2025-06-04 392
-
永磁同步电机矢量控制策略分析2025-03-20 340
-
永磁电机矢量控制算法合集2023-05-29 2043
-
永磁同步电机的矢量控制原理是什么2021-10-14 2757
-
基于矢量控制的永磁同步交流伺服电机控制系统程序2021-09-23 1329
-
永磁同步电机的矢量控制策略2021-08-27 1849
-
永磁同步电机矢量控制相关资料分享2021-07-05 1998
-
基于矢量控制的永磁同步电机控制方法综述2021-06-29 1527
-
<B></B>感应和永磁电机采用单矢量旋转半导体的矢量控制2021-04-28 664
-
怎样使 STM 的永磁电机矢量控制精确定位?2018-11-30 2219
-
基于矢量控制的永磁同步交流伺服电机控制系统2017-01-21 1135
-
永磁同步电机矢量控制系统2016-03-30 672
-
永磁同步电机矢量控制原理2014-01-22 51380
-
转差频率矢量控制的电机调速系统方案2011-09-06 7721
全部0条评论

快来发表一下你的评论吧 !
