

单片机串口通信基础
控制/MCU
1878人已加入
描述
删除
单片机串口通信基础 串口通信是非常总要的,首先我们先了解一下基础 随着多微机系统的广泛应用和计算机网络技术的普及,计算机的通信功能越来越显的重要。计算机通信是指计算机与外部设备或者计算机与计算机制之间的信息交换。 通信有并行通信和串行通信两种方式。在多微机系统以及现代化测控系统中信息的交换多采用串行通信的方式。计算机通信是将计算机技术和通信技术的结合,完成计算机与外部设备或者计算机与计算机之间的信息交换,可以分为两大类:并行通信和串行通信. 并行通信常常是将数据字节的各位用多条数据线同时进行传送。(如下图)




{先发起始位:低电平 表示起始位 再发数据位 LSB 是低端 (LSB: Least Significant Bit)最低有效位,先发低位数据共7位数据 + 1位校验位数据 (判断发送是否正确,如果不要校验位那么8位都是数据位) 最后发一个停止位(高电平结束就是一个位宽的高电平表示停止位) 共10位 一帧 。}
异步通讯的特点:不要求收发双方时钟的严格一致,实现容易,设备开销较小,但每个字符要附加2~3位用于起始位,各帧之间有间隔,因此传输效率不高。 2、同步通信 同步通信时要建立发送方时钟对接受方时钟的直接控制,使双方达到完全同步。此时,传输数据的位之间的距离均为“位间隔”的整数倍,同时传送的字符间不留间隙,即保持位同步关系,也保持字符同步关系。发送方对接受方的同步可以通过两种方法实现。

同步通信的特点::是以特定的位组合“01111110”作为帧的开始和结束标志,所传输的一帧数据可以是任意位。所以传输效率高,但实现的硬件设备比异步通信发杂。(同步通信可以作为了解我这里只是想表达下我的理解,其实现实中我们用的大多数是异步通信)。 二、串行通信的传输方向 1、单工 单工是指数据传输仅能沿着一个方向,不能实现反向传输。 2、半双工 半双工是指数据传输可以沿两个方向,不能实现反向传输。 3、全双工 全双工是指数据可以同时进行双向传输。


串行通信接口标准
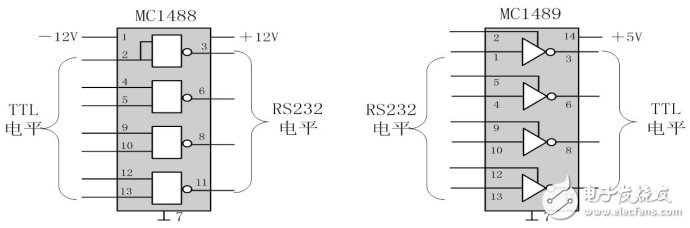
一、RS-232C接口RS232C是EIA(美国电子工业协会)1969年修订RS-232C标准。RS-232C定义了数据终端设备(DTE)与数据通信设备(DCE)之间的物理接口标准。
1、机械特性RS-232C接口规定使用25针连接器,连接器的尺寸及每个插针的排列位置都有明确的定义。(阳头)




RS-232C总线标准受电容允许值的约束,使用时传输距离一般不要超过15米(线路条件好时也不能超过几十米)。最高传送速率为20Kbps.
2、有电平偏移
RS-232C总线标准要求收发双方共地。通信距离较大时,收发双方的地电平差别较大,在信号地上将有较大的地电流并产生压降。
3、抗干扰能力差
RS-232C在电平转换时采用单端输入输出,在传输过程中当干扰和噪声混在正常信号中。为了提高信噪比,RS-232C总线标准不得不采用比较大的电压摆幅。 二、RS-422A接口(为了改进 RS-232C 就是在RS232C 输出后再进行改进)

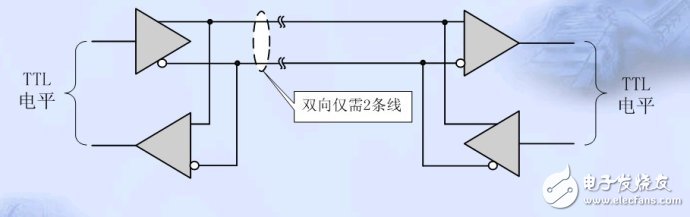
RS-485的信号传输采用两线间的电压来表示逻辑1和逻辑0。由于发送方需要两根传输线,接收方也需要两根传输线。传输线采用差动信道,所以它的干扰抑制性极好,又因为它的阻抗低,无接地问题,所以传输距离可达1200米,传输速率可达1Mbps。
RS-485是一点对多点的通信接口,一般采用双绞线的结构。普通的PC机一般不带RS485接口,因此要使用RS-232C/RS-485转换器。对于单片机可以通过芯片MAX485来完成TTL/RS-485的电平转换。在计算机和单片机组成的RS-485通信系统中,下位机由单片机系统组成,上位机为普通的PC机,负责监视下位机的运行状态,并对其状态信息进行集中处理,以图文方式显示下位机的工作状态以及工业现场被控设备的工作状况。系统中各节点(包括上位机)的识别是通过设置不同的站地址来实现的。 更多信息请查看
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
-
单片机串口通信浅谈2011-11-09 543
-
PC机与单片机串口通信程序设计2016-01-08 613
-
PC机与单片机串口通信程序设计.zip2016-01-08 722
-
LPC900单片机与串口通信例程2016-01-19 724
-
51单片机串口通信程序2016-05-16 1052
-
单片机串口通信485modbus2016-07-12 886
-
LPC900 单片机与串口通信例程2017-08-31 919
-
DSP与单片机串口通信的设计与实现2017-10-20 776
-
51单片机与串口通信的介绍代码说明2021-01-19 976
-
基于STM32单片机的串口通信资源2021-07-05 1452
-
Atmega16单片机串口通信2021-11-15 660
-
51单片机~串口通信(讲解+代码)2021-11-22 1076
-
基于Linux的ARM和单片机的串口通信设计2023-10-11 203
-
基于单片机的串口通信模块设计2023-10-19 243
-
单片机串口通信的接收与发送2023-12-20 3503
全部0条评论

快来发表一下你的评论吧 !
